三次元線路マップを利用した衛星測位による列車位置計測
衛星測位を列車保安制御へ適用することを目標として、沿線の地形、構造物、設備等による衛星電波の反射、散乱、回折、遮蔽が避けられない中でも、一定以上の測位精度および信頼性を維持することが可能な、新しい測位手法の開発に取り組んでいます。
本測位手法では、2つのGNSS(全地球航法衛星システム:Global Navigation Satellite System)受信機を外部クロックにより同期させ、フェールセーフコンピュータ(保安制御用コンピュータ)が、2つの受信機が受信した衛星の放送データを照合するとともに、計測データについて信号強度、疑似距離(測位演算に使用する電波の到達時間から換算した距離)の各種検定を行いながら、走行する線路の三次元座標列への一次元拘束を伴う測位演算を行い、座標を決定します(図1)。測位演算は、受信機の機能を用いないためブラックボックスではなくなり、フェールセーフコンピュータ内で行うことにより処理の安全性が高まります。
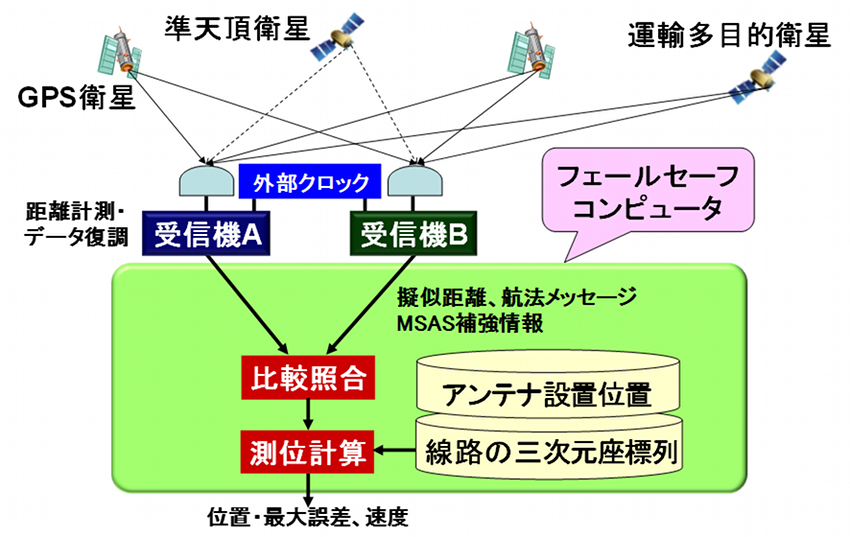
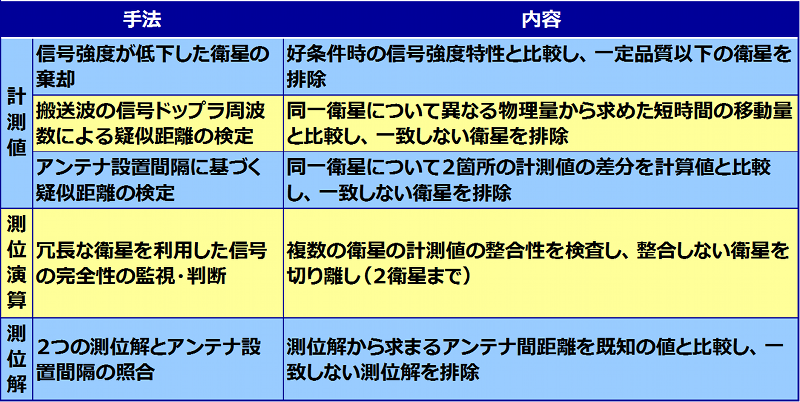
計測データについては、受信環境の影響による計測誤差を、①既定値、②異なる物理現象、③衛星の冗長性を利用した比較により極力排除し(表1)、受信環境以外の誤差要因はMSAS(運輸多目的衛星用衛星航法補強システム:MTSAT Satellite-based Augmentation System)補強情報により排除します。
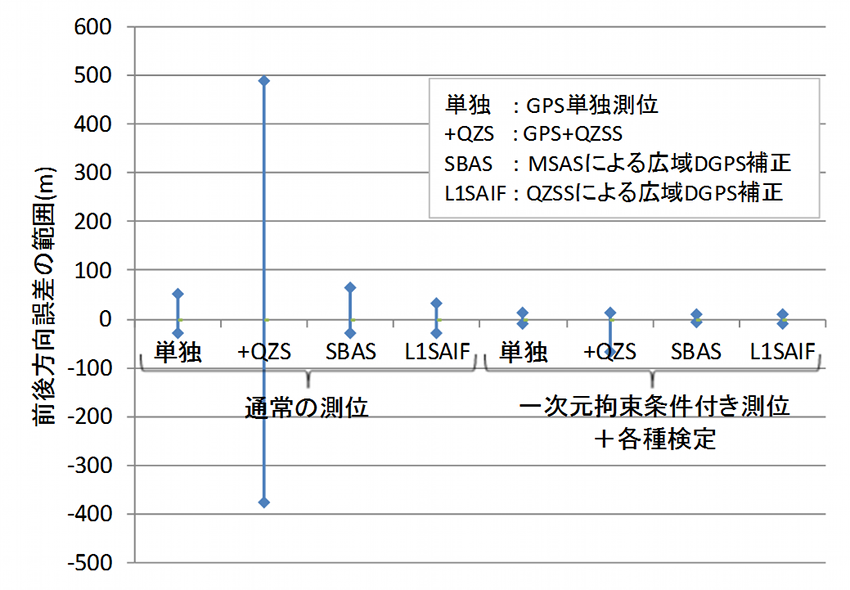
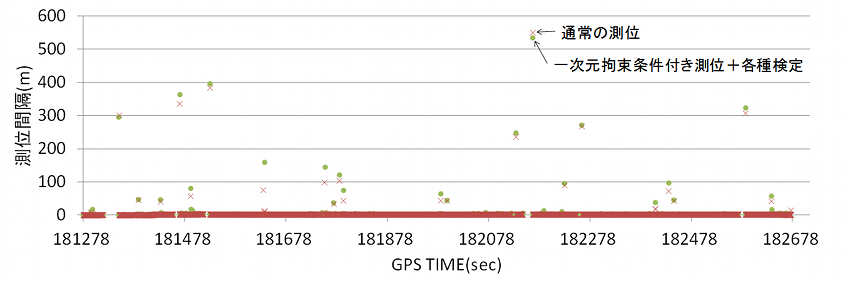
営業路線で本測位手法の性能を評価したところ、MSASによる広域ディファレンシャルGPS補正時、最大誤差が通常の測位で役66mのところ、本手法では10m程度にまで低減(図2)でき、これに伴う測位の可用性低下も僅かであることを確認しました(図3)。
なお、本測位手法は、「列車は線路上の指定された走行許可区間を走る」という特性を利用して、外部システム(進路制御機能)から進路情報を受けることを前提としています。外部システムが当該列車の在線位置を知る手段もまた車上の測位であり、本システムの立ち上げ時に在線する線路を判定する機能についての開発も必要です。また、本測位手法を実装した列車保安制御システムが、常に測位誤差を上回る余裕距離を設定して安全制御できるように、測位誤差の推定(保護レベル計算)を行う機能の開発も必要であり、これらについて引き続き研究に取り組みます。