パンタグラフ接触力によるトロリ線静高さの推定手法
1.はじめに
一般に電車線の架設基準は静的な状態に対して設定されていますが、検測車ではパンタグラフが電車線を押し上げ、電車線が振動してしまうため、静的な状態を測定する事は容易ではありません。そこで、近年の研究で測定可能となったパンタグラフ接触力を活用し、トロリ線の静高さを推定する手法を開発しました。
2.推定手法
図1に示すように、トロリ線の静高さの推定手法には2種類の手法があります。
1つ目の手法は等価ばね定数法です。この手法は適用が容易で、径間周期の大まかな高さ変動を推定可能です。本手法は径間周期の高さ勾配などの検査などに活用可能です。
2つ目の手法は伝達関数法です。この手法は事前に電車線の動特性データベースの作成が必要になりますが、径間周期やハンガ間周期の高さ変動も推定可能です。本手法はハンガ長さの不整なども検出可能であり、詳細な静高さが推定できるので、シミュレーションにより列車速度やパンタグラフの条件などを変更した際の集電性能の検証も可能です。

3.推定結果
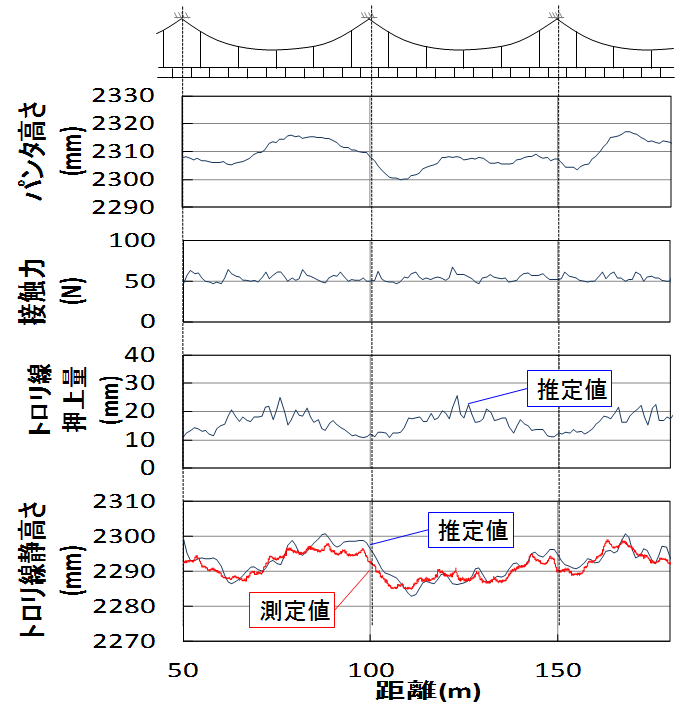
伝達関数法によりトロリ線の静高さを推定した結果を図2に示します。本結果より、接触力から推定したトロリ線静高さには4mm程度の誤差が含まれるものの、大まかな傾向を捉えることが可能であることが確認できます。
参考文献
- 臼田隆之、池田充:接触力測定に基づくトロリ線静高さ推定、鉄道総研報告、第28巻、第10号、pp.35-40、2014.10
- 池田充:架線・パンタグラフ間の接触力測定に基づく架線の静的状態診断、第12回評価・診断に関するシンポジウム、pp.20-23、2013