
~トンネル内高速走行時の電車線挙動(風速・風向測定)~
新幹線がトンネル内を走行する際,パンタグラフに作用する風速は明かり区間に比べて大きいことが知られています。一般的にパンタグラフに作用する風速が増加すると,パンタグラフが電車線を押し上げる力(揚力)が増加するため,トンネル区間では明かり区間に比べて電車線に過大な力が作用することが懸念されます。そのため,トンネル内の架線挙動を把握・解明することは新幹線高速走行での集電系の信頼性向上や設備保守の面から重要となります。そこで今回,トンネル内列車通過時における電車線付近(トロリ線上方400 mm )の風速・風向に加え,線条の変位・応力・加速度等を測定しました。ここでは,列車通過時の風速・風向計の測定結果についてご紹介します。
図1に列車通過時の列車速度と線路平行方向の風速の測定結果を示します。トンネル内に対向列車がいない場合は,列車速度と風速の比はほぼ一定で,電車線設備には列車速度の0.22倍,パンタグラフには1.22倍の風速が作用しています。また,トンネル内に対向列車が走行している場合,電車線設備には最大で列車速度の0.5倍,パンタグラフには1.5倍の風速が作用していることが分かりました。
図2に上下線列車すれ違い時における風速・風向の測定結果を示します。一般的に,列車がある観測点を通過する時,列車進行とは逆向きの風が観測されます。今回,列車がすれ違う時の風向・風速を測定した結果,それぞれの列車により発生した風の向きが180°異なるため,風が相殺し合い,低減することを確認しました。
現在,車両の種類や編成の違いによる風速・風向への影響を評価しています。また,トンネル内架線挙動について,パンタグラフ特性や架線条件の違いによるシミュレーションを実施しています。
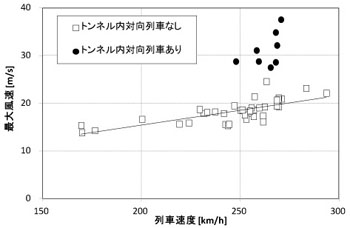
図1 列車通過時の列車速度と最大風速
(線路平行方向)
図2 列車すれ違い時の風速・風向
(電車線構造 菅間 陽二)
自動離線集計プログラム
新型車両の導入や速度向上に際し,集電性能の評価のためパンタグラフの離線測定がしばしば行われます。この離線測定時の集計作業を自動化し,リアルタイムに離線率を表示可能なツールとして自動離線集計プログラムを開発しましたのでご紹介いたします。
離線率は測定した離線をドラム(引留区間)単位で集計し算出します。このプログラムでは,車軸の速度発電機から出力されるパルス信号を入力することにより走行キロ程を把握し,入力された離線検出信号に対して,オーバラップ位置のキロ程でドラムごとに自動的に離線集計処理を行います。このためにはオーバラップ位置のキロ程やドラム番号の電子データをあらかじめ用意する必要がありますが,手動の押しボタンを用いたオーバラップ位置入力による集計にも対応しています。この場合,手動で集計が行われたキロ程を記録して,オーバラップ位置のデータを作成する機能があり,事前にデータを用意できない場合には,初回走行時のみ手動集計を行い,同一区間における2回目以降の走行では集計を自動化するといったことも可能です。パンタグラフ電流を入力し,力行または回生時のみを離線集計の対象とすることも可能で,データの評価方法に応じた集計方式を選択できます。
離線率のほかに,各ドラムの最大離線時間およびドラム中で最大離線が発生したキロ程,速度,電流のデータが画面上およびCSVファイルに出力されます。表計算ソフトを用いなくても,このプログラム上で集計した離線率などのデータのソートが実行できますので離線率が大きかったドラムなどがすぐに確認できます。
このほかにも,速度をアナログ電圧として出力する機能や,駅やトンネルのキロ程をあらかじめ登録しておくと駅出発・通過時やトンネル走行時に電圧信号を出力する機能,サーマルチャートと連携しチャートへ印字する機能を備えています。図1にプログラムの動作画面,図2にプログラムの構成を示します。
このプログラムは,市販のA/D変換カードを接続したノートパソコン上で動作します。

図1 自動離線集計プログラムの画面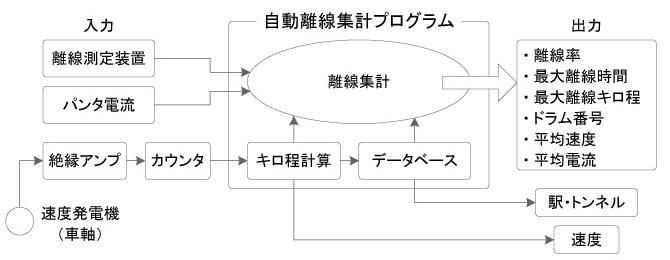
図2 自動離線集計プログラムの構成
(集電管理 松村 周)
電力貯蔵装置の補充電・補放電制御
近年,電圧降下対策あるいは回生電力の有効利用を目的とした電力貯蔵装置が,直流電気鉄道の地上設備として適用されつつあります。ここでは,待機時の電力貯蔵媒体を中間充電状態とすることで電車の力行・回生の双方に対応できる制御手法に関する研究内容を紹介します。
従来から適用されている電力貯蔵装置の「固定電圧制御」の概念を図1に示します。電力貯蔵装置は外線電圧を検出して充放電動作を判断します。外線電圧が「充電開始電圧」を上回ると,電力貯蔵装置の近傍において回生が発生したと判断して充電動作を行います。逆に,外線電圧が「放電開始電圧」を下回ると,力行が発生したと判断して放電動作を行います。しかし,電力貯蔵装置の定格エネルギー容量が充分大きい場合でも,満充電状態に近い状態ではそれ以上の充電はできなくなります。逆に空充電状態では放電できなくなります。従って,待機時の充電状態を安定に制御することが,電力貯蔵装置の適用効果を高める上で重要になります。
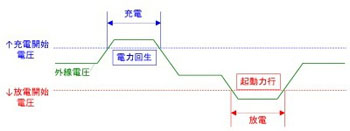
図1 固定電圧制御の概念
そこで,新たな制御手法として,図2に示す「補充電・補放電制御」を検討しました。外線電圧が充電開始電圧以下で放電開始電圧以上の場合,電車と電力をやりとりする必要性が少ないと判断できます。その際,貯蔵媒体を設定した中間充電状態になるように「補充電」「補放電」を行います。また,貯蔵媒体の充電状態が中間よりも高い状態であるほど放電電流を大きくし,低い状態であるほど充電電流を大きく制御します。外線電圧が充電開始電圧以上もしくは放電開始電圧以下となり,力行もしくは回生する電車が付近に存在することが外線電圧から明確に確認される場合,従来通り固定電圧制御を行います。
本研究では,電気二重層キャパシタを電力貯蔵媒体とする電力貯蔵装置を検討しました。通常の最大電圧が1,280 Vのキャパシタですが,補充電・補放電制御方式を適用すれば最大1,480 Vに設定することができます。すなわち,電車の回生電力の充電に伴いキャパシタの充電電圧が1,280~1,480 Vの範囲に達しても,補放電の機能によって中間充電電圧 (1,140 V)になるように制御されます。つまり1,280~1,480 Vの充電状態が僅かな時間に限定されるため,上記の設定が可能になります。これによりキャパシタの最大エネルギーを約30 %増加させることができます。
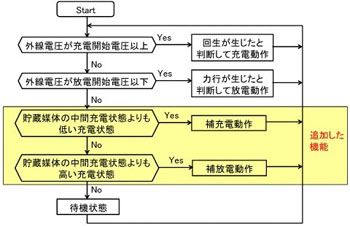
図2 補充電・補放電制御の概念

図3 電気二重層キャパシタを用いた電力貯蔵装置
(き電 小西 武史)
フィードフォワード制御による接触力変動低減手法の検討
架線・パンタグラフの良好な機械的接触を実現するための一つの手法として,鉄道総研ではアクティブ制御技術による接触力変動低減に関する研究を実施しています。これまで,PID制御やインピーダンス制御といった制御則の適用について検討を進めてきました。それぞれの制御則に用いるフィードバック信号が違うため制御効果の確認できる周波数帯が異なり,前者は,DCから1 Hz程度以下の接触力変動低減に効果があり,後者は10 Hz程度以下の単一周波数成分の接触力変動低減に効果があることが分かっています。PID制御は,フィードバック信号である接触力に含まれる高周波数成分の信号にアクチュエータの応答が対応できないことにより高周波数域では制御系が不安定となります。その一方,インピーダンス制御はパンタグラフ部材の変位をフィードバック信号としたため比較的高い周波数まで制御可能ですが,ターゲットとした周波数以外の周波数成分の接触力変動が増加することがあるという性能限界があります。
そこで,上記の問題を解決するために,フィードフォワード制御の適用について検討を始めています。この制御手法は,低減したい接触力変動成分の周波数fを持った正弦波信号sin ( 2πf ) に適切な振幅Aと位相φを与えてアクチュエータへの指令電圧A sin ( 2πf +φ) を生成し,これに応じた制御力をパンタグラフに作用させるというものです。低減したい周波数成分は例えば径間周期に対応する周波数などで,予めデータベースで持っている情報から決定することを想定しています。複数の周波数成分を含む外乱に対しては対応する正弦波信号を複数用意します。フィードバック信号を使わずに制御信号を生成するため,アクチュエータの遅れによる制御系の不安定化は起こりません。正弦波信号に与える適切な振幅と位相は,パンタグラフと架線の動特性を考慮に入れて決定する必要があり,その方法については現在検討中ですが,一例として最急降下法という手法を用いて自動的に適切な振幅と位相を求める方法を提案しました(図1)。その検証試験を鉄道総研所有のパンタグラフ総合試験装置で実施しました。しゅう動走行状態を模擬する円盤は周速300 km/hとし,円盤には300 km/h走行時の径間周期に相当する周波数である1.7 Hzで振幅15 mmの上下運動を与えています。300 km/hでの走行状態を模擬した条件下において最急降下法を適用して制御力を調整したところ,最終的に接触力変動を70 %程度低減することができました。ただし,制御力の調整に時間を要しているため,アルゴリズムの改良を検討中です。
-
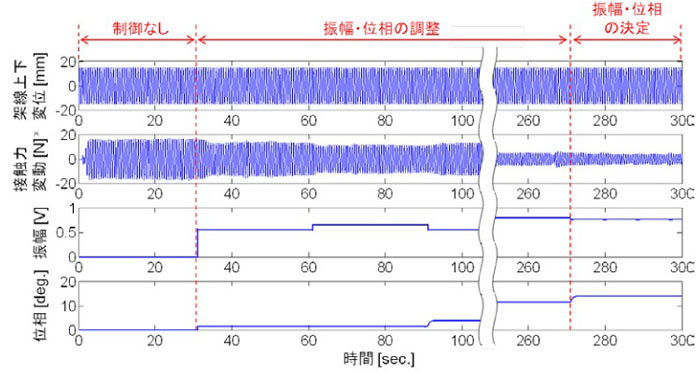
図1 制御力の自動調整による接触力変動低減効果
* 架線上下変位周波数の接触力変動成分
(集電力学 山下 義隆)
(ワンポイント講座)フィードバック制御・フィードフォワード制御
集電力学のページでは,架線・パンタグラフ間の接触力変動低減手法としてフィードフォワード制御を取り上げました。前述のように,過去にはフィードバック制御の一つである比例制御についての検討も行なっています。比例制御とは,測定された接触力の目標値に対する偏差,すなわち接触力変動に対して比例ゲインKpを乗じ,これを制御力としてパンタグラフに作用させる手法です。一方フィードフォワード制御では接触力信号を用いずに,走行速度と事前にデータベース化してある架線の支持点間隔やハンガ間隔などの情報に基づいて外乱の周波数 f を算出し,制御パラメータA(振幅)と φ(位相)を用いて制御力を生成します。これら二つの制御則のブロック線図をそれぞれ図1,図2に示します。
比例制御には外乱の変化に追随できるという利点があり,素早く追随させるためにはKpを大きく設定する必要があります。ところがKpを大きく設定し過ぎると制御が不安定になるというトレードオフが存在します。身近な例として,比例制御は空調などの温度制御に用いられることが多いのですが,その場合には将来の傾向を予測する微分制御と過去の偏差を補償する積分制御を合わせたPID制御として用いられます。PID制御の場合には合計3つの制御ゲインを設定する必要がありますが,実際の製品の場合にはユーザーがこれらを手動で調整することは困難であり,自動調整するように学習機能を備えた製品が多く存在します。
フィードフォワード制御は車体傾斜制御装置に用いられており,予期せぬ外乱の変化には追随できませんが,フィードバック制御のように制御が発散することはありません。ただし,このような外乱の変化に追従させるためにフィードフォワード制御と比例制御を併用することが一般的であり,パンタグラフの制御についても速度に応じた揚力特性の変化を補償するためには比例制御が有効となります。
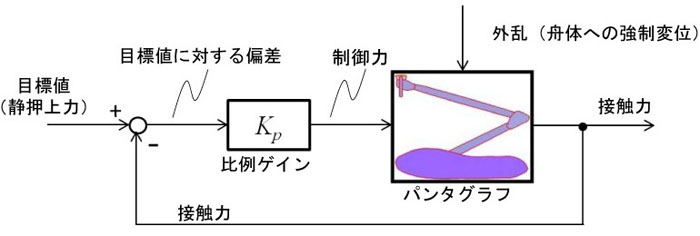
図1 比例制御(フィードバック制御)のブロック線図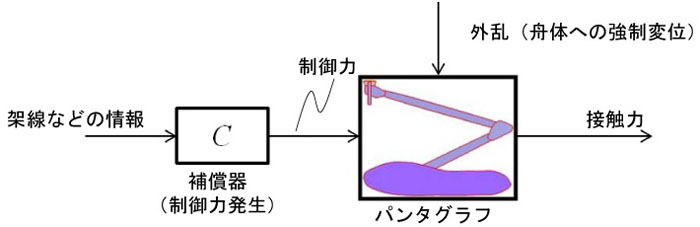
図2 フィードフォワード制御のブロック線図
(集電力学 小林樹幸)

- Copyright(c) 2013 Railway Technical Research Institute