22. 主電動機の電流差情報を用いた空転抑制制御方法
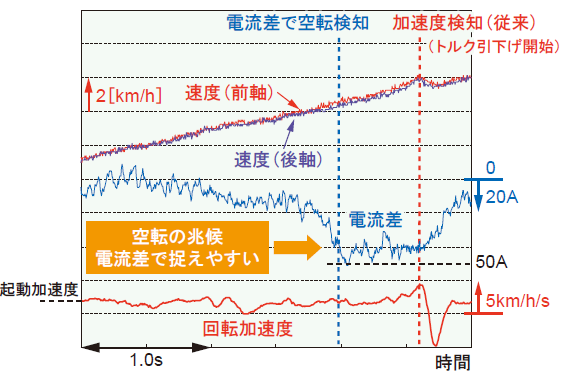
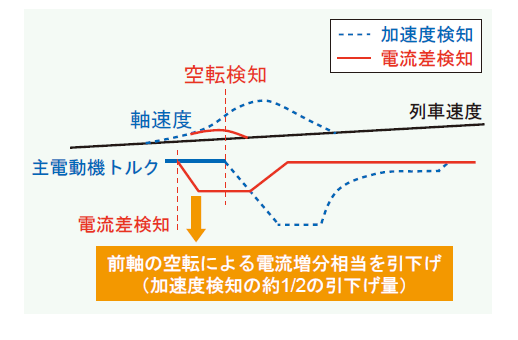
電気車では通常、主電動機の回転加速度情報や速度差情報(空転速度)を用いて空転検知することが一般的です。電車では、一台のインバータ装置で複数の主電動機を駆動する主回路方式が広く用いられています。今回、台車内の2台の速度センサレス主電動機を並列で駆動する主回路制御方式において、主電動機間の電流差に着目することで、どちらかの軸に空転が発生したことを回転加速度を用いた場合よりも早く検知できることを現車試験により確認しました(図1)。空転しやすい雨天時には、台車内の進行方向前軸は、軸重移動などによる影響により後軸より先に滑り始める頻度が高く、回転加速度による検知よりも前に大きな電流差(今回使用した電車では最大で50A程度)が生じ、空転の兆候を捉えることが期待できます。そこで、電流差による空転の早期検知により、回転加速度による検知よりも小さな主電動機トルク引下げ量(加速度検知時の約1/2)で空転を抑制する制御方法を開発しました(図2)。ただし、両軸が同時に空転した場合には加速度検知により既開発の再粘着制御を行います。
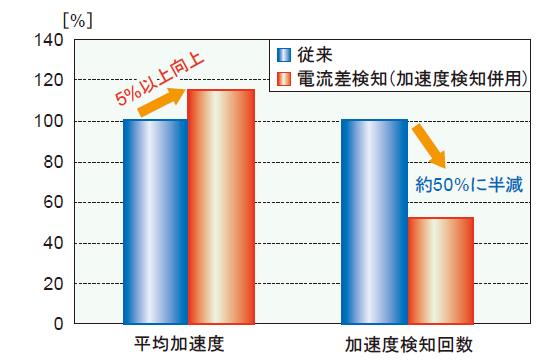
開発した制御方法の有効性を確認するため、近郊電車を用いて散水試験を実施した結果、空転時の平均加速度が5%以上向上し、加速度検知の動作頻度は約50%に半減することを確認しました(図3)。このように電流差に着目する制御方法は、速度センサを用いないで主電動機トルク制御される(速度センサレス)電車の場合により有効であり、本制御方法が新製通勤電車に採用されました。