1. Formation of a running test environment for a virtual train set using HILS
- RTRI developed a HILS system for railway vehicles creating a virtual running test environment to replace actual test runs.
- It also developed a rapid prototyping bogie whose component characteristics can be changed using software.
The development of railway vehicles involves a lot of effort and expense in the areas of experimental production and evaluation (running tests). Against this background, replacing the current running tests performed on commercial lines with bench tests which offer more flexibility and evaluating bogie performance without having to produce prototypes would increase the efficiency, quality and reliability of development.
Accordingly, the RTRI constructed a running test environment to enable the virtual running of train sets by adding motion simulators to rolling stock test plant. The motion simulator reproduces the motion of the virtual car end which is calculated in real time using distributed computation (Fig. 1). This system linking actual objects (i.e., the test vehicle) and simulated objects (virtual vehicles) is called HILS (Hardware-In-the-Loop Simulation), and makes it possible to explore the interaction between vehicles of a train set using a bench test. RTRI also developed a rapid prototyping bogie exclusively for use in vehicle tests. Its characteristics (such as the stiffness of the primary suspension and the damping force of various dampers) can easily be changed using software since the springs and dampers on the bogie are replaced with actuators (Fig. 2).
Virtual three-car train set tests were conducted with a virtual front and rear car on either side of a real car which was placed on a rolling stock test plant. The virtual running test environment made it possible to explore the difference between single and multiple car running behaviour (Fig. 3). It was also confirmed that the damper and other parts could be simulated by controlling the actuators mounted on the rapid prototyping bogie (Fig. 4), and that the required vehicle motion characteristics could be created by changing the parameter settings.
 Fig. 1 Configuration of the running test environment for the simulated train set
Fig. 1 Configuration of the running test environment for the simulated train set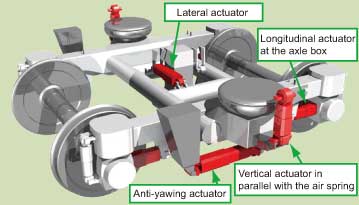 Fig. 2 Rapid prototyping bogie
Fig. 2 Rapid prototyping bogie
 Fig. 3 Example of the response variation in the test vehicle
Fig. 3 Example of the response variation in the test vehicle Fig. 4 Performance of the simulated damper for the rapid prototyping bogie
Fig. 4 Performance of the simulated damper for the rapid prototyping bogie
- HOME > Major Results of Research and Development in Fiscal 2009 > I Safety/Reliability
-

RTRI HOME - Copyright(c) 2011 Railway Technical Research Institute