1. High-response pneumatic actuator for tilt control
- An actuator was developed with higher maximum response and actuator force.
- By introducing a pneumatic circuit to produce a damping force suited to the tilt damper, and adding the damper circuit to the new actuator design made it possible to simplify the tilting device.
For next generation tilt control systems which further contribute to reducing motion sickness and in order to realise a target tilt pattern based on functional ergonomic evaluation, it is necessary to have highly responsive tilt control actuators.
Existing electro-hydraulic actuator (EHA) designs offer high tracking performance but are costly and tend to easily transmit high frequency vibrations from the bogie to the vehicle body. The purpose of the present development was to radically improve the performance of the conventional pneumatic tilt control actuator, with the aim of producing an actuator capable of replacing the EHA.
The present actuator design (Fig 1) utilizes a flow control valve instead of a pressure control valve as a servo valve, and has a modified pneumatic circuit and control algorithm to increase its response performance and force (Fig 2). This allows more precise tilt control. Furthermore, while similar in functionality to the EHA, the abovementioned system comes at a much lower cost and acts as a very effective insulation against high frequency vibration.
In addition a pneumatic damper circuit was included into the design generating a damping force for tilting motion in the case of passive tilting. Given that this function is incorporated into the actuator itself, there is no longer any need for this function to be provided by a separate device, as was the case previously. Consequently, the tilting structure was made smaller and simplified, increasing maintainability and saving cost (fig 3).
This actuator can also be retro-fitted onto conventional tilting vehicles.
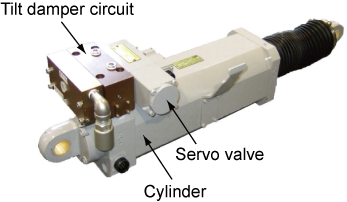 Fig. 1 The new design high-response pneumatic actuator
Fig. 1 The new design high-response pneumatic actuator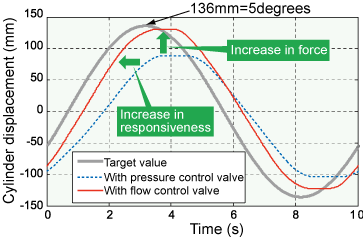 Fig. 2 Increase in actuator force and responsiveness in relation to servo valve displacement
Fig. 2 Increase in actuator force and responsiveness in relation to servo valve displacement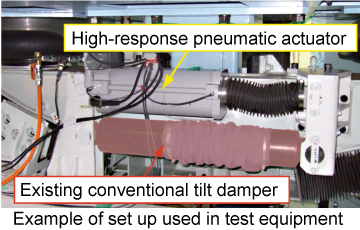 Fig. 3 simplification and reduction in size of the tilting device
Fig. 3 simplification and reduction in size of the tilting device
- HOME > Major Results of Research and Development in Fiscal 2010 > IV Comfort/Convenience
-

RTRI HOME - Copyright(c) 2012 Railway Technical Research Institute