3. Image processing based pantograph contact force measurement method
- A method was developed for measuring the contact force on the pantograph/contact wire interface.
- By eliminating the need to build sensors into the pantograph or by cutting back the number of sensors required, it has become possible to measure contact force in cases where the existing method could not be applied.
In evaluating the health of track side equipment, contact force is a valuable source of information for evaluating the contact line/pantograph interface. With the recently developed multi-segment contract strip structure however, the number of sensors required to measure the contact force has increased, and it has become apparent with certain new cases that the conventional measurement approach of building all sensors into the pantograph, is no longer possible (Fig 1). A new contact force measurement method was therefore developed, based on image processing, which can reduces the number of built-in sensors required.
The new contact force measurement method employs several high temporal- and spatial- resolution CCD line cameras which are installed adjacent to the pantograph. The image data is utilized to determine the inertial force exerted on the pan head and restoring force of springs supporting the pan head, which are converted into contact forces (Fig 2).
Depending on the pantograph, it is sometimes necessary to measure forces acting on the stoppers and raise/lower guides. Since their components bear non-linear characteristics, forces acting on these components cannot be evaluated with image processing. Consequently, in order to measure the latter set of forces, the method was developed including some built-in sensors.
The method was then applied to a panhead with a multi-segment strip pan head system, which requires multiple measurement points in order to measure the contact forces. Accuracy of contact force measurement was then evaluated by means of excitation tests. Results confirmed that the level of precision obtained with the new method was equivalent to that yielded by the existing approach (Fig 3).
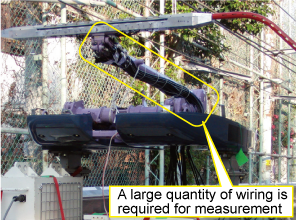 Fig. 1 Picture of the conditions under which contact forces were measured with the existing system
Fig. 1 Picture of the conditions under which contact forces were measured with the existing system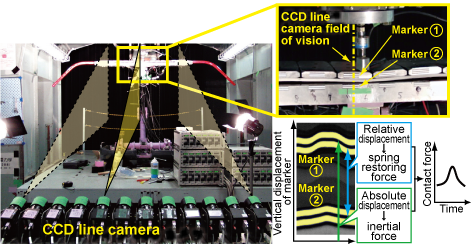 Fig. 2 Theory behind the contact force measurement method based on image processing
Fig. 2 Theory behind the contact force measurement method based on image processing
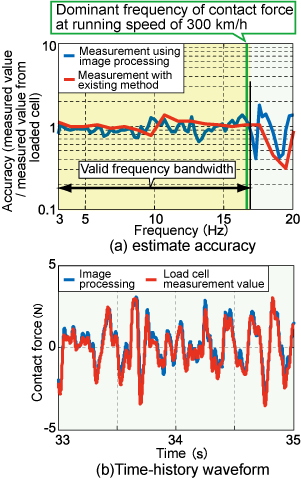 Fig. 3 Accuracy of contact force measurement method using image processing
Fig. 3 Accuracy of contact force measurement method using image processing
- HOME > Major Results of Research and Development in Fiscal 2010 > V Basic Research
-

RTRI HOME - Copyright(c) 2012 Railway Technical Research Institute