
簡易型軌道検測装置の開発と性能評価
1.はじめに
現在,軌道変位の測定法には,軌道検測車によるもの,トラックマスターやライトレックのようなレール上を人力により移動させる検測装置を使うもの,軌間ゲージや糸を使う手検測があります.軌道検測車は広い範囲を短時間で測定することができますが,導入コストは高く,また,臨機応変な運用は困難です.一方,手検測は,導入コストは最小で済みますが,連続的な測定には多くの労力がかかってしまいます.そのため,多くの事業者ではレール上を人力で移動させる検測装置を使用していますが,この装置の導入にもある程度のコストがかかります.一方,これまでに併用軌道を持つ路面電車事業者に対して調査を行った結果,交差点等で半径の非常に小さい急曲線が多いことや,アスファルト舗装の不陸のために,既存の検測装置を使うことが困難であるといった問題があることがわかっています.
そこで,急曲線や併用軌道においても測定が可能で,より安価な簡易型軌道検測装置の開発,試作およびその性能評価を行いました.
2.新しい検測装置の開発,試作
上記の併用軌道特有の事情を踏まえつつ,また,普通鉄道においても使用可能な簡易型軌道検測装置の開 発,試作を行いました.図1 に試作した検測装置の全体外観を示します.本装置は価格を抑えるために,軌間,フランジウェー幅,高低,通りの検測は接触式のセンサを用いています(図2).そして,軌間,水準,フランジウェー幅の測定精度については従来の検測装置と同等を目指しました.また,高低,通りについては,急曲線での測定ができるように装置をレール長手方向に短くしたことや,軌道内での取り扱いを容易にするために軽量なものとした制限の中で,可能な限り高めることとしました.
高低,通りは0.625m 弦での検測となっており,データ最小出力間隔は62.5mm となります.データ処理により5m 弦換算,10m 弦換算の出力,平面性の出力が可能です.更に,分岐器通過ガイド機構を備え,分岐器部でもフランジウェーを含めた連続測定が可能です.バッテリー駆動で6 時間の連続測定が可能で,重量も12kg と従来装置と比べ軽量なものになりました.

図1 試作した軌道検測装置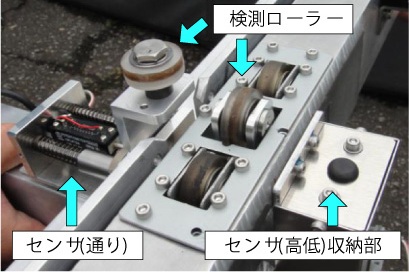
図2 検測機構部(天地逆)
3.性能評価
(1)再現性
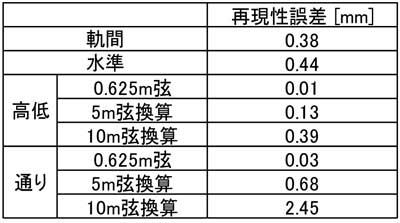
試作した検測装置を用いて,再現性確認試験を行いました.再現性の確認は,同じ区間を3 回測定した際の各波形の差の標準偏差(再現性誤差)によって行いました.表1 にその結果を示します.軌間,水準変位では再現性誤差は0.5mm 以下であり,精度は良好であると言えます.高低変位,通り変位では,0.625m 弦での値では0.1mm 以下であり精度は高いですが,5m 弦換算では通りの再現性誤差が0.68mmと多少大きくなり,10m 弦換算では,高低は0.39mmと良好ですが,通りは2.45mm と大きい値となっています.
- 表1 測定精度の検証結果(再現性)
(2)従来装置との比較
次に従来の検測装置との比較として,同じ区間を測定し,その差を評価しました.表2 にその結果を示します.また,図3 に検測波形の1 例を示します.軌間変位,水準変位の波形は従来装置での検測波形とほぼ一致し,その差の標準偏差は軌間で0.37mm,水準で0.46mmであり,再現性と同様に,十分な精度を有していると言えます.高低変位,通り変位では,高低5m 弦換算では標準偏差が1mm 以下ですが,10m 弦換算では大きくなり,通りでは数値が更に大きくなっています.10m 弦換算値での誤差が大きくなる傾向が見られましたが,これは,0.625m 弦から10m 弦への換算を倍長演算により行っているためであると考えられます.この演算により誤差は最大256 倍に拡大することになるため,例えば0.625m 弦では0.01mmの誤差が,10m 弦に換算すると最大2.56mm の誤差となってしまいます.そのため,レールと検測ローラーの接触状態がわずかに変化した際に,その影響が現れるものと考えられます.ただし,走行速度の低い急曲線部や併用軌道においては,5m 弦での高低,通り変位管理は十分有効と考えられることから,こうした箇所,線区では実用上の問題はない誤差と言えます.
- 表2 測定精度の検証結果(従来装置との比較)
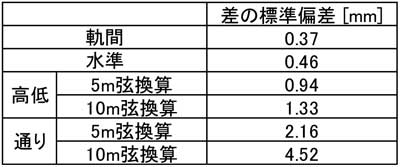
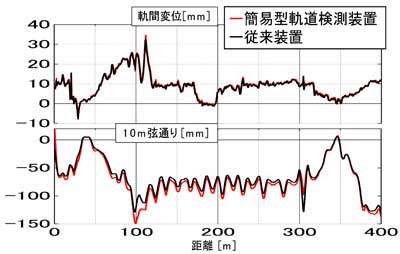
図3 検測波形例
4.おわりに
路面電車の併用軌道や普通鉄道で使用可能な簡易型軌道検測装置を開発しました.軌間,水準変位の測定では,従来の検測装置での測定結果と比較して誤差は小さく,検測結果は良好でした.
現在,高低・通り検測機構の改良や波形データ処理手法の改良,性能確認試験を続けており,市販化に向けて準備しています.
(記事:清水 惇)
固有振動数変化を利用したレール軸力測定方法の基礎検討
1.はじめに
鉄道軌道のロングレール化は,振動・騒音の低減,乗り心地の改善に効果があり,多くの路線において導入が進められています.しかし,ロングレール軌道では,温度変化によりレール長手方向に過剰な圧縮軸力あるいは引張軸力が発生する可能性があり,絶対軸力を簡便に求められる非破壊測定法の開発が望まれています.ところで,レールに作用する軸力の大きさによりレールの固有振動数が変動します.本研究ではこの物理現象に着目し,レールの固有振動数をもとにレール軸力を推定する方法について考えてみました.ここでは,数値解析と現場実験をもとに,本法の実現可能性について紹介します.2.改訂のポイント
まず,50kgN レール(締結間隔60 cm)および3 号PC まくらぎからなる無限長のバラスト軌道を想定し,軸力を受けながら振動するバラスト軌道に関する波動分散解析を行い,軸力測定に有効な振動モードを抽出しました.解析より得られた軸力測定に適するレールの振動モードの例を図1 に示します.図は,各振動モードに関して,最大振幅発生時における変形の特徴を示しています.両振動モードともに,まくらぎ位置を節として振動するモードであり,レールがまくらぎと独立して振動するので,締結装置,まくらぎ下面のばね定数,および,まくらぎの振動モードの影響を受けず,軸力測定に適しています. 通常レール軸力の測定では約100kN 刻みでの測定が必要です.図中に,100kN の軸力変動に対する周波数変動の大きさを示します.固有振動数の測定精度は測定方法にもよりますが,最も簡単なインパルス加振の場合,その測定精度はおよそ0.1~0.2 Hz です.したがってレール軸力の測定に必要な分解能は十分に実現可能と考えられます.
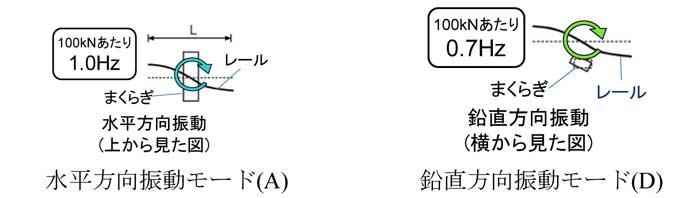
図1 測定に最適な振動モード
3.実軌道におけるインパルス加振実験
実軌道のロングレール区間で,日照によるレール軸力変動を外力とし,レールの固有振動数の変化とレール軸力の変化との関係を調べました.実験の概要を図2 に示します.加振箇所は,隣接するまくらぎの中間点であり,加振点に水平方向と鉛直方向からインパルスハンマで打撃を与え,加振箇所でのレールの応答波形を測定しました.なお,個々の加振波形の特性の違いによる影響をなくすために,加速度データを加振力で除して基準化し,イナータンス(加速度/加振力)に変換しました.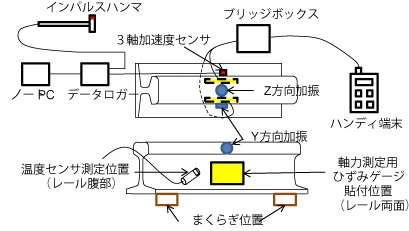
図2 ロングレール加振実験の概要
4.実験結果
図3 は,レール軸力とレール温度の経時変化を示したものです.実験当日のレール温度の変化は11.3℃ですが,その間にレール軸力には177 kN の変動がありました.加振実験の測定例を図4 に示します.図より,水平加振では340Hz 近傍に,鉛直加振では730Hz 近傍に固有振動数のピークが見られます.これらは,まくらぎ位置を節,レール中間部を腹として,レールが水平方向および鉛直方向に振動する定在波の振動モードです.前掲の図1 に照らし合わせると,前者が水平方向振動モード(A),後者が鉛直方向振動モード(D)に相当します.両図のピークの形状を比べると,水平方向振動モードのほうが鋭く尖っており,固有振動数をより正確に特定できますので,したがって測定に有利であることがわかりました.
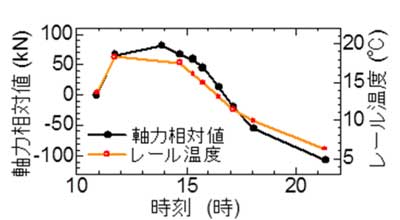
図3 軸力相対値およびレール温度(実軌道)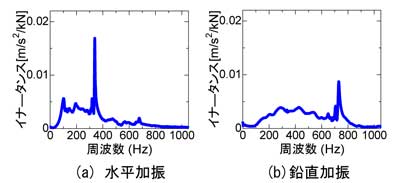
図4 加振実験測定例 (実軌道)
図5 はレール軸力と固有振動数の関係を示したものです.本実験では177 kN のレール軸力変動で,水平方向で3.66 Hz,鉛直方向で6.56 Hz の固有振動数の変動がありました.固有振動数の変動幅は鉛直方向の方が水平方向より1.8 倍ほど大きく,これはおよそ固有振動数の大きさに比例しています.また,図中の直線は測定値に近似式を当てはめたものです.図より,鉛直方向および水平方向のいずれの場合も,レール軸力変化量と固有振動数変化量には明瞭な線形性があり,どちらも非常に高い相関性があることがわかりました.また,水平方向振動モード(A)のほうが相関係数が大きく,測定値のばらつきも少ないことから,水平方向振動モード(A)のほうが測定に有利と判断できます.
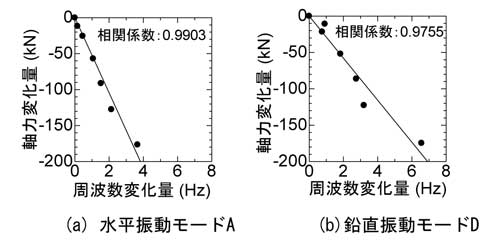
図5 軸力と固有振動数(実軌道)
5.まとめ
本研究では,軌道振動特性に基づくレール軸力の測定方法の可能性について,数値解析と現場実験により検証しました.数値解析の結果より,締結箇所を節とするレールの鉛直方向および水平方向の定在波の振動モードが,締結装置,まくらぎ下面のばね定数,および,まくらぎの振動モードの影響を受けず,レール軸力測定に有効であることが分かりました.また,実軌道での加振実験より,レール軸力の変化量とレールの固有振動数の変化量の間に明瞭な線形関係があることを確認しました.
(記事:相川 明)
構造物上バラスト軌道の地震時残留変位の推定法
1.はじめに
構造物上のバラスト軌道の地震時の変形挙動は,地震動による横揺れ(構造物の応答加速度)と構造物境界における不同変位(角折れ,目違い)の影響を同時に受けることとなります.特に構造物が非線形化するL1 レベルを超える地震動が生じた場合,不同変位の影響が大きくなり,バラスト軌道の地震後の残留変位が増加することが予測されます.このような背景から,本研究では,構造物境界部におけるバラスト軌道の地震時の残留変位を予測するためのノモグラムを作成するとともに,延長8km の高架橋モデル線区において残留変位の卓越箇所の推定を行いました。
2.地震後の残留変位に関するノモグラムの作成
構造物不同変位の影響を考慮したバラスト軌道の地震時変形挙動に関する基本性状を把握するために,正弦波加振と単純な角折れ,目違いを組み合わせた検討を行い,これに基づきノモグラムを作成しました.図1 に地震後の残留変位に関する解析モデルを示します.筆者らが開発してきた解析プログラムは,任意形式のバラスト軌道及び構造物を三次元FEM によりモデル化するとともに,常時及び地震時における道床横抵抗力特性を詳細に評価し,温度変化や地震動に伴う軌道の座屈・大変形挙動を定量的に検討することができます1).図2 にバラスト軌道のモデル化の例を示します.構造物境界の影響を受けない一般部については,一般部加振開始後最初のピークにおいて最終道床横抵抗力が10kN/m から8kN/m に低下するように道床横抵抗力を設定しています.構造物境界部前後に関しては,構造物境界を2.5kN/m の最小値とし,一般区間に至るまでを距離に対して線形に減少させています.図3 に最大加速度,角折れ,目違いと残留変位の関係を示します.図から,最大加速度,角折れと残留変位の関係については,角折れが40mrad程度以上に達すると残留変位が大きくなる傾向を示すこと,角折れが20mrad 程度の場合においても最大加速度が600gal 程度以上に達すると残留変位は大きくなることが分かります.最大加速度,目違いと残留変位の関係については,目違いが60mm 程度以上に達すると残留変位は大きくなる傾向を示すことが分かります.
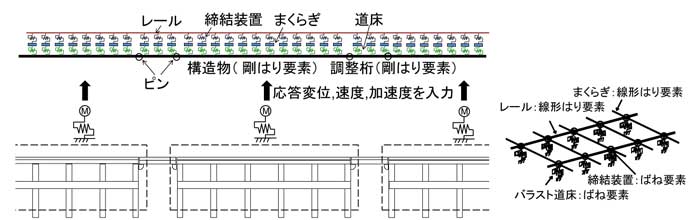
図1 地震後の残留変位に関する解析モデル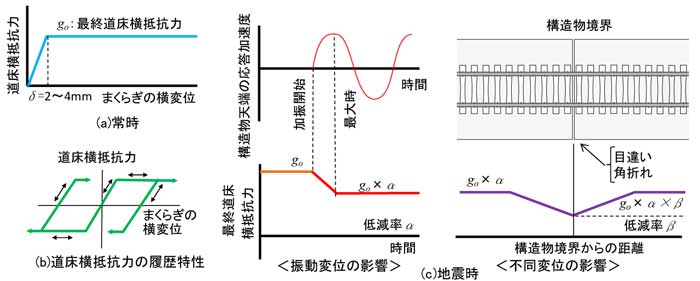
図2 軌道の道床横抵抗力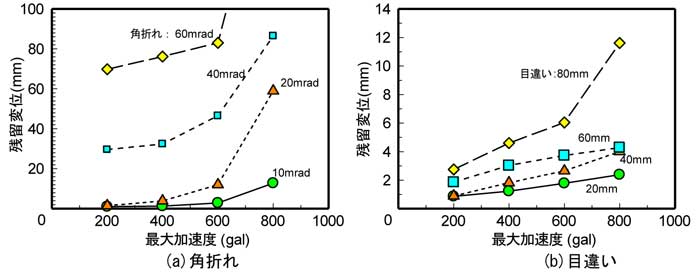
図3 地震後の残留変位に関する解析結果
3.モデル線区における残留変位の推定
バラスト軌道区間における座屈危険個所を推定するため,別途,延長8km の高架橋モデル線区を作成して地震応答解析を行い,構造物の応答加速度と角折れ,目違いの関係を整理するとともに,これにより生じる残留変位を推定しました.高架橋の構造形式や連続条件,高架橋の非線形特性は,実際のバラスト軌道区間の構造物を参考に設定しました.地震動は,鉄道構造物等設計標準・同解説(耐震設計)2)で示されている,海溝型のL2スペクトルI 及び内陸活断層型のL2 スペクトルII としました.図4 にノモグラムを用いた残留変位の算定結果を示します.残留変位を算定するノモグラム(図中に示されている残留変位のライン)は,図3 に基づき作成しました.地震動の大きさを元波形の15%から50%に変化させた場合には,構造物の加速度と角折れ,目違いは線形に増加しています.一方,地震動の大きさが50%から100%に増加した場合には,構造物が降伏して角折れ,目違いが急速に増加することが分かります.これらの応答値を,ノモグラムと比較することにより,残留変位の生じやすい箇所を分析することができます.例えば海溝型L2 スペクトルI の結果について着目すれば,角折れに関してはA,B,C の地点が,目違いに関してはa,b,c の地点が残留変位の発生しやすい箇所と推定できます.図5 に構造物諸元と応答値を示します.図5 に,図4 に示した6 地点が実際の線区ではどのような条件かを示しました.これらの地点では,前後の等価固有周期の差が大きい,或いは前後の構造物より降伏震度が高いなどの特徴が確認できます.
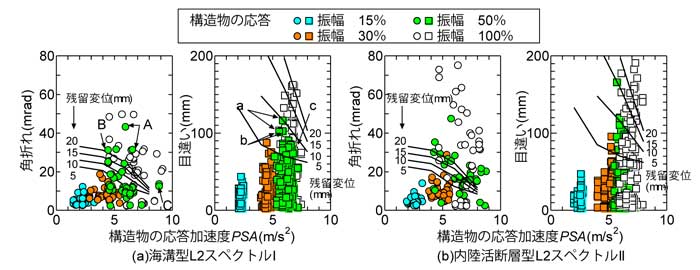
図4 ノモグラムを用いた残留変位の算定結果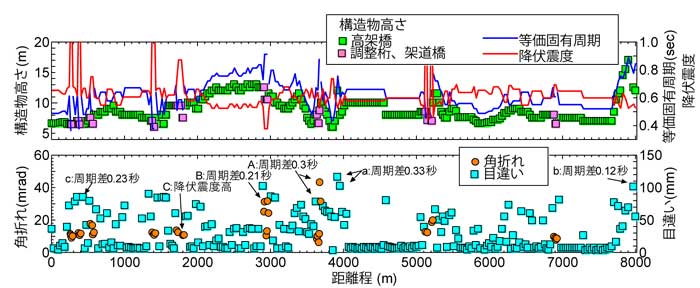
図5 構造物の諸元と応答値
4. まとめ
本研究で提案したノモグラムは,推定法の精度を勘案すると,あくまで絶対的というよりは相対的な 残留変位の生じやすさを推定するツールであると位置づけられますが,構造物の加速度と角折れ,目違 いの複合要因を考慮した相対的な残留変位の発生しやすさの推定に関しては,一定の精度で活用できる と考えます.参考文献
1) 浅沼潔,関根悦夫,片岡宏夫,曽我部正道,後藤恵一,徳永宗正:バラスト軌道の地震時変形挙動,鉄道総研報告,Vol.25,No.6,pp.47-52,2011
2) 鉄道総合技術研究所編:鉄道構造物等設計標準・同解説(耐震設計),1999
(記事:曽我部正道)

- Copyright(c) 2012 Railway Technical Research Institute