
石積み壁の耐震補強設計マニュアル
1.はじめに
兵庫県南部地震以降は橋梁の耐震対策が進められ,その後に発生した大規模地震でも,その効果が確認されています.一方で,近年では土構造物,土留め構造物等の耐震補強も進められています.土留め構造物のうち,石積み壁は数量も多いため,効率的な耐震補強が求められます.そこで,鉄道総研では既設石積み壁の耐震補強方法に関して,関係機関と連携しながら研究開発を進め,石積み壁の耐震補強設計マニュアル(以下,本マニュアルと称します)を作成したので,その概要について報告します.
2.石積み壁の破壊メカニズム
石積み壁は背面地盤にもたれかかりながら,積み石の自重とかみ合わせにより土圧に抵抗する土留め擁壁です.地震時には,図1に示すように,地震時土圧・慣性力の作用により積み石にはらみ出しが生じ,栗石層の沈下を誘発することで変位が不可逆的に進行し,最終的に局所的な積み石の抜け出し・栗石の流出を契機として,全体な崩壊に至ります.このため,背面地盤の自立性が高い場合でも,壁体に作用する慣性力により,地震時に破壊に至る例があります.このことから,耐震補強にあたっては,積み石の抜け出しを防止しながら,必要に応じて背面地盤の安定化を図る必要があります.
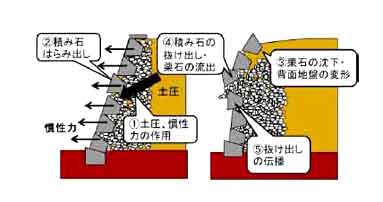
図1 石積み壁の破壊メカニズム
3.耐震補強工法の概要
本マニュアルでは,既設石積み壁の耐震補強方法として,新たに開発したネット補強工法1)を含め,現場条件や要求性能に応じて,積み石と背面地盤の安定性を向上させる耐震補強方法の選定法を紹介しています.選定対象としている耐震補強工法の概要を図2にまとめます.
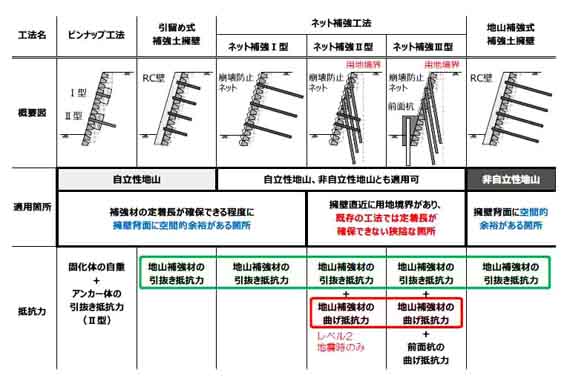
図2 マニュアルで選定対象とする耐震補強方法の概要
(1)引留め式補強土擁壁2):自立性を有する背面地盤を対象として,短尺の地山補強材を打設した上で,石積み壁の前面にRC壁を構築する事で耐震補強を図る工法です.
(2)ピンナップ工法3):自立性を有する背面地盤の前面に構築された,主に空積み形式の石積み壁を対象にした工法で,間知石とその背後の栗石を部分的に固化させ一体化を図るピンナップ工法Ⅰ型と,固化体に加えてアンカー体により間知石を背面地盤に定着させるピンナップ工法Ⅱ型があります.設計・施工マニュアルは,(一財)研友社より購入することができます.
(3)ネット補強工法1):壁面にネットを敷設して積み石の抜け出しを防止し,地山補強材の併用により背面地盤の安定性を向上させる工法です(図3).RC壁体の構築に換えて,ネットにより積み石の脱落を防止可能なことと,離散的に打設する地山補強材の抵抗力を石積み壁全体に伝達可能であり,背面地盤の安定性や要求性能に応じて補強仕様を調整可能な点が特徴です.一般的な施工条件では,水平に近い方向で補強材を打設することで補強材の引張り抵抗を期待したネット補強Ⅰ型の採用が効率的です.また,用地の制約が厳しい箇所では,ネット補強Ⅱ型や,ネット補強Ⅲ型の採用で経済化を図ることが可能です4).
(4)地山補強式補強土擁壁2):非自立性の背面地盤を対象として,引留め式の場合よりも長尺の地山補強材を打設した上で,前面にRC壁を構築することで耐震補強を図る工法です.
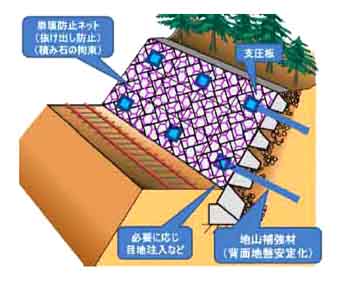
図3 ネット補強工法の概念図(Ⅰ型)
4.耐震補強設計マニュアルの概要
本マニュアルでは,現場条件に応じた上記の耐震補強工法の選定法を示すとともに,ネット補強工法の設計における応答値算定法,性能照査法を示しています.特に,ネット補強工法は地震時にネットが破断しないことが補強効果発現の前提条件となるため,ネットの破断に関する照査法を詳しく記載しています.また,背面地盤の用地制約が厳しい条件を対象としたネット補強Ⅱ型,ネット補強Ⅲ型における地山補強材の曲げ補強効果算定法や,石積み壁下部に打設するH鋼杭による補強効果についても,補強効果を期待するための前提条件や,その評価法について詳しく解説しています.
そうした設計法の解説に加えて,詳細設計に先立ち実務者が比較的簡易に補強仕様を把握するための支援として,実大断面を対象とした概略の設計例も付属資料に記載しています.
4.おわりに
本報では,既設石積み壁の耐震補強工法を紹介するとともに,2016年6月に鉄道技術推進センターから刊行した既設石積み壁の耐震補強設計マニュアルについて,その概要を報告しました.また,ネット補強工法については,現在詳細な設計計算例を作成中であり,鉄道技術推進センターより刊行予定です.
耐震補強設計マニュアルは,鉄道技術推進センターのHPからダウンロードいただくか,本稿末の執筆者にご連絡頂くことで入手が可能です.また,ネット補強工法の概要・実績については,鉄道ACT研究会のHP(http://www.rail-act.org/)にも掲載されております.
【参考文献】
1) 中島ら:崩壊防止ネットと地山補強材による既設石積み壁の補強方法の開発,土木学会論文集C,Vol.71,No.4,pp.317-334,2015.
2) 丸善:鉄道構造物等設計標準・同解説 土留め構造物,2012.
3) 鉄道総合技術研究所:石積壁の耐震補強工設計・施工マニュアル -ピンナップ工法施工マニュアル-
4) 島田ら:狭隘箇所における既設石積み壁の耐震補強に関する実験的検討,ジオシンセティックス論文集,Vol.30,pp.183-190,2015.
(記事:基礎・土構造研究室 中島進)
レール削正とマルチプルタイタンパの組合せ保守効果を考慮した軌道保守計画
1.はじめに
削正車(図1)によるレール削正とマルチプルタイタンパ(図2,マルタイ)による軌道変位保守を組み合わせて同時期に行う(組合せ保守)ことで,輪重変動が減少する効果により,高低変位(狂い)進みは組合せ保守前に比べて減少し,軌道変位の保守周期を延伸できると考えられます.このような効果を認められた箇所における軌道状態の推移例を図3に示します.しかしながら,この効果の推定法はなく,また2種類の保守用車を連携させた運用計画の作成は煩雑であるため,組合せ保守が積極的に計画されることはありませんでした.そこで,実データを用いて,組合せ保守効果を期待できる箇所の条件を明確にし,その効果を推定する手法を構築しました.そして,組合せ保守を考慮した軌道保守計画システムを開発しました.
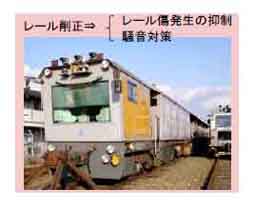
図1 削正車
図2 マルタイ
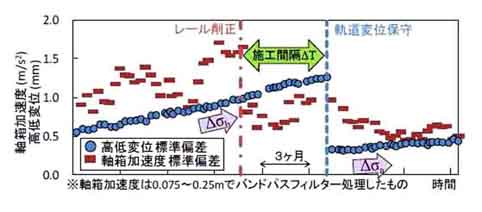
図3 軌道状態推移例
2.組合せ保守効果の推定法
2.1 組合せ保守候補箇所
道床状態が不良な箇所やレール凹凸の小さな箇所等では,組合せ保守効果を得るのは難しいと考えられるため,どこでも組合せ保守効果を得られるわけではありません.そこで,実データの分析結果に基づき,図4に示す条件を満たす箇所を組合せ保守効果がある箇所(組合せ保守候補箇所)としました.ここでは,軸箱加速度を0.075~0.25mでバンドパスフィルター処理したものを軸箱(レール),2~5mで処理したものを軸箱(道床)といいます.
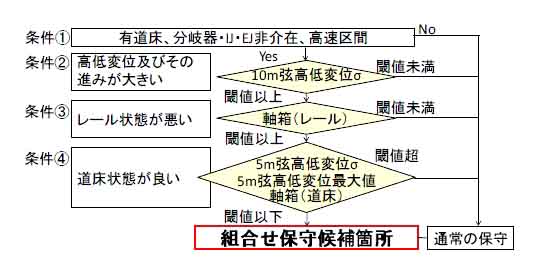
図4 組合せ保守候補箇所の選択法
2.2 組合せ保守効果の求め方
組合せ保守を行うと,保守後の高低変位進みは減少します.そこで,式(1)から得られる組合せ保守前後の高低変位進み比κを,組合せ保守効果の指標に用います.
κ = Δσa / Δσb(0≦κ≦1)……………………………(1)
Δσbは組合せ保守前,Δσaは組合せ保守後の高低変位進み[mm/日]を表し,レール削正を先に行う場合を「削正先行」,軌道変位保守を先に行う場合を「マルタイ先行」の組合せ保守と呼びます.
2.3 高低変位進み比への影響要因
(1) 施工間隔ΔTと施工順序(図5(a))
組合せ保守を行う際のレール削正と軌道変位保守の施工間隔については,間隔が短いほど高低変位進み比κは小さく(効果が大きく)なります.これは,レール削正または軌道変位保守をした後,日数の経過とともに軌道状態が徐々に変化してしまう前に,組合せ保守を行った方がより良い状態が維持されるためと考えられます.
施工順序については,マルタイ先行より削正先行の方が,組合せ保守効果は大きくなります.これは,レール削正によりレール凹凸を減少させてから軌道変位保守した方が,輪重変動が十分に低減されることで,整正された高低変位が小さいまま推移し,高低変位進みが抑制されるためと考えられます.
(2) 軸箱(レール)の改善量Δα(図5(b))
レール削正による軸箱(レール)の改善量が大きいほど高低変位進み比κは小さく(効果が大きく)なります.これは,レール状態が良好になるほど,輪重変動の低減量が大きくなり,高低変位進みが抑制されるためと考えられます.
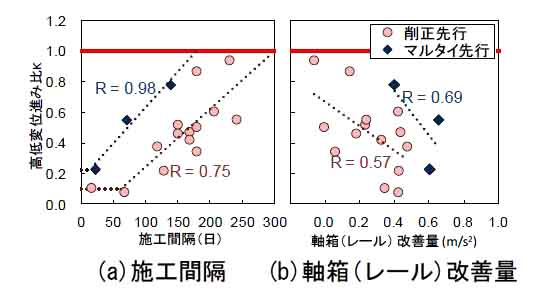
図5 高低変位進み比と影響要因の関係
2.4 高低変位進み比κの推定式
以上より,高低変位進み比κには施工間隔及び軸箱(レール)の改善量の影響が大きいと考えられることから,高低変位進み比κは式(2)により推定できます.
κ = - γΔα + δΔT + ε(γ,δ,ε:係数)……(2)
3.組合せ保守計画システムの開発と検証
3.1 組合せ保守計画システムの開発
既に開発されている軌道状態評価システム(RCA),軌道変位保守計画システム(MTS),レール削正計画システム(RGS)の3つのシステムを連携させて,組合せ保守計画を策定できる「組合せ保守計画システム」を開発しました.図6に本システムの構成を示します.まずRCAにより図4で示した組合せ保守候補箇所を選定します.この候補箇所については,次の2通りの方法で組合せ保守計画を作成することができます.1つは,組合せ保守候補箇所には必ず軌道変位保守が行われるように軌道変位保守計画を作成する場合(図6【1】),もう1つは,組合せ保守候補箇所を軌道変位保守計画作成時には考慮せず,レール削正計画作成時から考慮して計画を作成する場合(図6【2】)です.組合せ保守候補箇所における軌道変位保守時期が決まれば,その一定期間内にレール削正が計画されるよう組合せ保守計画を作成し,組合せ保守されるロットに対しては,高低変位進み比κを適用して年度末の軌道状態を得ることができます.
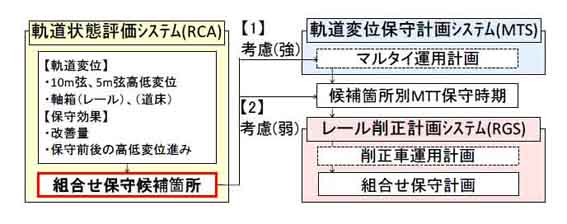
図6 組合せ保守計画作成システムの構成
3.2 本システムによる組合せ保守計画の作成
開発した組合せ保守計画システムを,軌道変位保守対象ロット数が800ロット(/100m)存在する線区データに適用し,単年度の組合せ保守計画を作成しました.まず,RCAにより組合せ保守候補箇所を選択した結果,107ロットが選ばれました.次に,組合せ保守を考慮した軌道変位保守とレール削正の計画を作成しました.図7は組合せ保守が計画されたロットにおける高低変位の推移予測例です.本ロットでは,組合せ保守を行うことで高低変位進みが約40%緩やかになると予測されました.
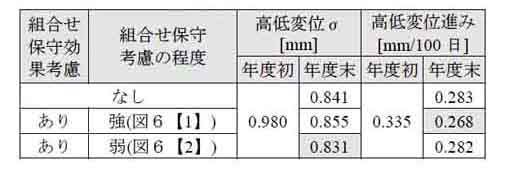
また,作成した計画どおりの保守を行ったとして,全線における年度末の高低変位標準偏差を予測した結果を表1に示します.年度末の状態が最良になるのは,組合せ保守の考慮の程度が弱い場合(図6【2】)で,高低変位進みが最小になるのは,考慮の程度が強い場合(図6【1】)となりました.この様に,組合せ保守を行うことで,従来と同じ保守延長であっても,高低変位,あるいは高低変位進みが小さく良好な軌道状態を将来的に維持できる可能性が高いと考えられます.一方で,組合せ保守に偏重して計画を作成すると,本来保守すべき高低変位の大きな箇所への軌道変位保守が計画されない場合が生じるため,組合せ保守量には適正値があることに留意して計画を作成する必要があります.
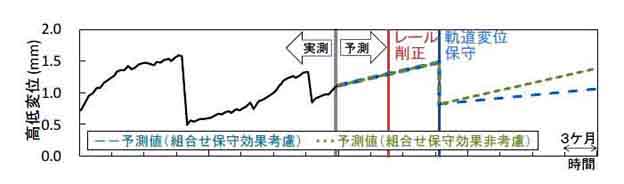
図7 組合せ保守箇所の高低変位推移予測例
- 表1 組合せ保守計画システムの計算結果
(記事:軌道管理研究室 松本麻美)
レーザー振動計測とUAVによる鉄道橋りょう検査
1.はじめに
鉄道を支える構造物の検査技術の高度化・省力化が必須の課題となっており,鉄道総研では,構造物検査に非接触測定技術を適用することによって,高所作業や線路内への立ち入り作業を省略し,検査作業を安全化,効率化するための技術開発に取り組んでいます.ここでは,非接触測定による構造物検査作業の省力化事例として,レーザー振動計測による長大橋吊りケーブルの張力推定手法と無人航空機(UAV: Unmanned Aerial Vehicle)による桁下面調査手法を紹介します.
2.長大橋吊りケーブルの張力推定
鉄道総研ではこれまでに,構造物診断用非接触振動測定システム「Uドップラー」(図1)を用いた橋桁の動的たわみ測定や高架橋の固有振動数測定手法の実用化・普及を図ってきました.これらの測定では比較的近距離からの非接触測定が行われています.
次のステップとして,非接触振動測定の長大構造物の検査への応用を目指し,不可視光のレーザーを用いて測定可能距離を延長するとともに,高性能な回転台装置で測定箇所の視準性能の向上を図った「長距離型Uドップラー」(図2)の開発に取り組んでいます.
図3に,長距離型Uドップラーの長大橋の吊りケーブルの検査への適用方法を示します.ケーブルに支持された長大橋では,ケーブル張力の管理が必要です.従来はケーブルをハンマーで打撃して起こした振動をケーブルに取り付けた振動計で測定することで張力を調べていました.
一方,長距離型Uドップラーを用いれば,遠隔位置からケーブルを順次視準して常時微動を測定することでケーブルの張力を推定できます.
その一例として,図4に示す橋りょうの吊りケーブルの張力推定事例を示します.図5に長距離型Uドップラーによるケーブルの常時微動測定結果例を,図6に常時微動によるケーブル固有振動数の推定結果を,図7に同固有振動数に基づくケーブル張力の推定結果をそれぞれ示します.測定結果から,非接触常時微動測定とハンマー打撃による従来手法による固有振動数が十分に一致すること,現状のケーブル張力が管理基準の範囲内にあることなどが確認できました.
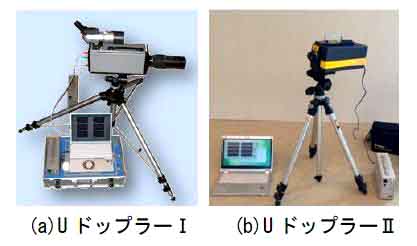
図1 Uドップラー
図2 長距離型Uドップラー
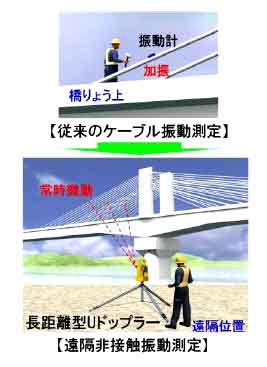
図3 長大橋検査への適用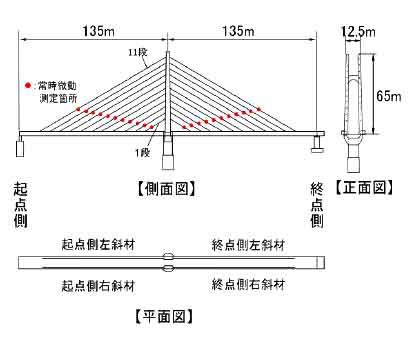
図4 測定対象橋りょうと測定箇所
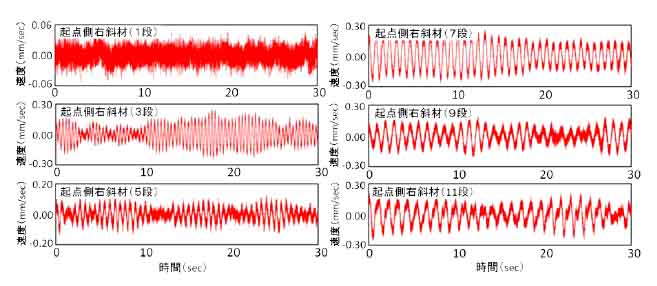
図5 長距離型Uドップラーによるケーブルの常時微動測定結果例
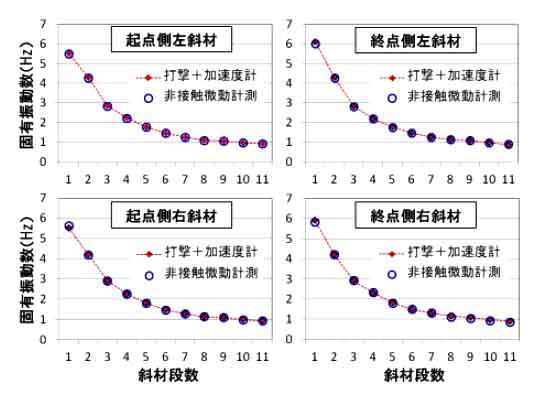
図6 ケーブル固有振動数の推定結果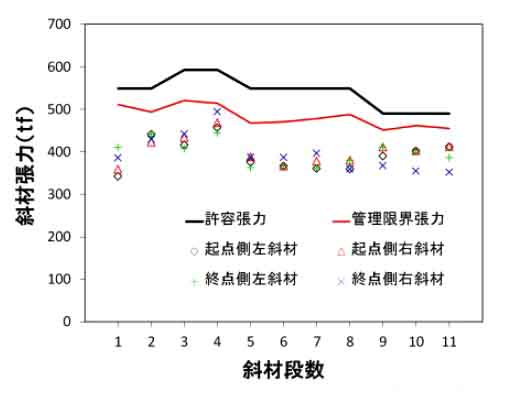
図7 ケーブル張力の推定結果
3.UAVによる桁下面調査
Uドップラーを用いた振動測定による構造物検査手法は,変状に伴う構造物の力学的な特徴の変化を定量的に検出する手法です.一方,振動特性の変化の原因となった構造物の変状の位置や種別の特定は,目視で行っています.この外観変状の目視調査も遠隔非接触で行えるようになれば,災害後の調査の安全化や長大構造物の調査の効率化を図ることができます.
近年,マルチコプタードローンなどのUAVを用いた空撮技術が飛躍的な進歩を遂げています.UAVは人が容易に近づけない高所や危険箇所の外観情報の収集に有効であるため,鉄道総研では構造物検査へのUAVの適用を検討しています.
しかしながら,一般的なドローンは,線路への侵入・墜落の危険性を完全に除去することは困難です.そのため,鉄道分野では,災害で列車が運行停止した状況下での空撮調査などへの活用の期待が高まる一方,日常の点検作業への応用には,車両,軌道,架線などへの支障の危惧から,抵抗があるのが実情です.
そこで,その解決策の一つとして,図8に示す機体上部にキャタピラーを搭載した「付着走行用UAV」を開発しました.この付着走行用UAVは橋りょうの桁の下面などに付着して電動の無限軌道で走行するため,構造物上の任意位置に高い位置精度で接近して近接画像を取得できます(図9).また,ドローンの機体制御用のGPS信号の途絶や,気流の乱れが生じやすい橋りょうの桁下部においても,付着走行することによって操縦不能に陥ることなく安定して検査を実施できます.

図8 付着走行用UAV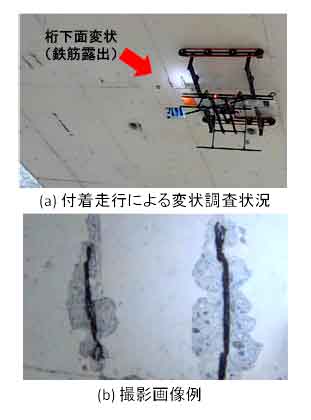
図9 桁下面の外観変状調査
4.おわりに
レーザー振動計測やUAVによる空撮技術の構造物検査への応用手法を紹介しました.引き続き,遠隔非接触計測による鉄道橋の検査技術の向上に取り組みますので,試験現地の提供などのご協力を賜れれば幸いです.なお,本研究の一部は,国土交通省の鉄道技術開発費補助金を受けて実施しました.
(記事:構造力学研究室 上半文昭)

- Copyright(c) 2016 Railway Technical Research Institute