
[クローズアップ]鉄道総研の基本計画
鉄道総研では,中長期的な活動の基本方針として,数年単位の「基本計画」を策定し,研究開発などの活動の方向性を定めています。ここでは,現在実施している2010(平成22)年からの5年を期間とした,基本計画RESEARCH 2010 の概要を紹介します。
先ず,基本方針は以下のようにしています。
- (1) 鉄道の持続的発展を目指した新技術の創造
- (2) ニーズに対する的確かつ迅速な対応
- (3) 活動成果の情報発信と普及
- (4) 鉄道技術の継承と基盤技術力の蓄積
- (5) 鉄道技術者集団としての総合力の発揮
- (a) 鉄道の将来に向けた研究開発(将来指向課題):5年~ 10 数年先の実用化を目指した,鉄道の明日へのブレークスルーとして,ミニプロジェクトを推進しています。
- (b) 実用的な技術開発:鉄道現場での実用化を目的とし,現場の問題解決に資する技術開発を行うものです。
- (c) 鉄道の基礎研究:鉄道固有現象の解明・評価法の確立と新技術・新材料等の鉄道への適用を図るもので,実用技術の萌芽・基盤となる研究です。
現時点は,5年間の中間折り返しを回った地点にあたり,事業者に使っていただける成果とするべくとりまとめにかかる段階となっています。また2015(平成27)年度から開始する基本計画について,社会環境の変容を把握しつつ検討を本格化させることとしています。次期計画の策定にあたっては,関係各所の意向を十分に汲んでいきたいと考えております。
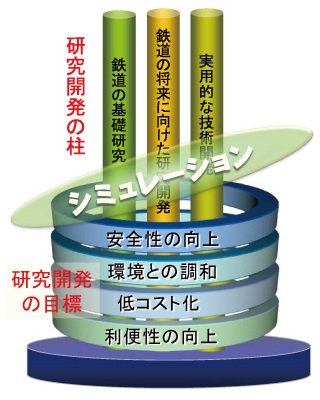
図1 研究開発の柱と目標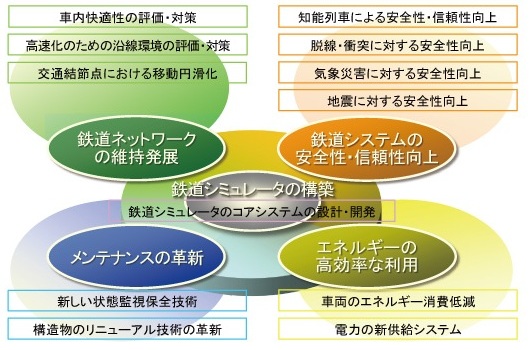
図2 将来指向課題
(企画室 青木 俊幸)
[研究&開発]上下振動制御装置の開発と実用化
1 はじめに
鉄道を利用していると,乗車する車両の種類や路線によって乗り心地の違いを体感することがあると思います。例えば,いわゆる“ ローカル線” と呼ばれるような地方交通線では,列車がそれほど速い速度で走行していなくても「ガタン,ゴトン」と音を立てて揺れながら走っていますが,多数の通勤列車や特急列車が運行されているような“ 幹線” では,そのような振動は比較的小さくなる傾向があります。
このような路線による乗り心地の違いは,軌道(レールや,それを支えている道床など)の構造や,その整備状況が原因である場合がほとんどです。一般に,軌道の整備基準はその路線の輸送量(通過トン数)によって定められ,輸送量が小さい路線ほど整備基準が低く設定されています。したがって,輸送量の小さい地方交通線は,軌道不整が大きくなる傾向があり,そのため車両が揺れやすいのです。
そのような路線であっても,車両の乗り心地を向上する方法はないのでしょうか。その方法のひとつとして,車両側で振動低減対策を行うことがあげられます。本稿では,特に軌道不整が大きい線区を走行する車両向けに開発した上下振動制御装置について紹介します。
2 開発した振動制御装置の構成
2.1 全体構成
開発した上下振動制御装置の全体構成を図1に示します。一般に貨車以外の鉄道車両では,車体は,レールに近いほうから順に、軸ばね(1次ばね系)、空気ばね(2次ばね系)と呼ばれる2段階のばね系で支えられています。それぞれのばね系には様々な重要な機能が備わっていますが、基本的には、1次ばね系はレールと車輪の接触状態を良好に保ち走行
安全性を確保すること、2次ばね系は台車から車体への振動の伝播を小さくして乗り心地を良くすることが目的です。
開発した制御装置は,2次ばね系と並列に可変減衰上下動ダンパ(電気的な指令により減衰力制御弁を動作させて力を制御できるダンパ)を取り付けて,車体の上下振動を低減します。可変減衰上下動ダンパは,1両あたり4本使用します。このダンパの力を制御するために,車体の4箇所に加速度センサを取り付けて,車体の振動を測定します。そして,この情報をもとに,制御装置で車体の振動低減に必要な力を計算し,各ダンパに指令します。制御装置からダンパへの指令は,指令電流の大きさにより行います。
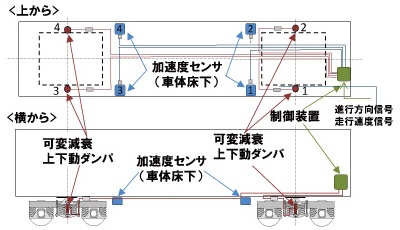
図1 可変減衰上下動ダンパによる制振制御装置の構成
2. 2 可変減衰上下動ダンパ
可変減衰上下動ダンパを図2に示します。車両への取付互換性を考慮して,このダンパの取付長は,現用の上下動ダンパと同一にしています。従って,現用の上下動ダンパを本ダンパに交換し,加速度センサと制御装置を搭載することにより,車両側の大幅な改造を伴うことなく本システムを車両に実装することができます。
ダンパの減衰力特性を図3に示します。指令電流が小さいときは,ダンパが伸びるときに減衰力を発生し,電流が大きいときにはダンパが縮む時に減衰力を発生します。また,減衰力の大きさは,伸び側については0.3A に近いほど,縮み側は1.4A に近いほど大きくなり,ちょうど中間の0.8A程度ではいずれの方向でも減衰力が最小になります。従って,この電流値によって,ダンパの減衰力の大きさを制御することができます。
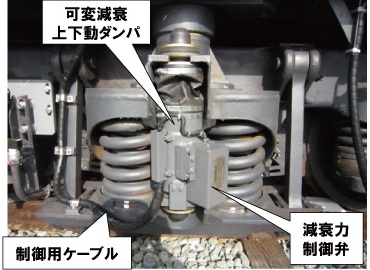
図2 可変減衰上下動ダンパ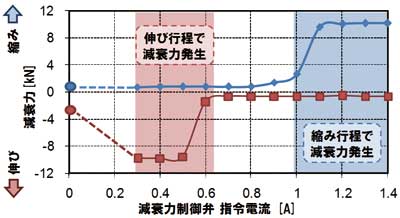
図3 可変減衰上下動ダンパの減衰力特性
2. 3 加速度センサと制御装置
加速度センサ(図4)は,図1に示すように車体の4箇所に取り付けます。この位置に取り付けると,車体の上下並進,ピッチング,ローリング振動を測定することができます。測定した振動をもとに,制御装置(図5)で車体の振動を低減するために必要な力を計算し,ダンパに指令します。必要な力を計算するアルゴリズムには,新幹線の左右振動制御装置等で一般的に使用されているスカイフック制御則を適用しました。センサから得た車体上下加速度を,各振動成分に分解したうえで積分して各振動成分ごとの速度を求め,これに定数をかけることによって振動低減に必要な力を求めています(図6)。なお,制御装置には,ダンパの減衰力制御機能のほかに,ダンパやセンサの故障等,システム全体の異常を監視する機能が搭載されています。

図4 加速度センサ
図5 制御装置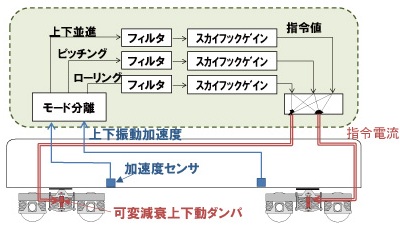
図6 制御アルゴリズム
3 営業線上での振動低減効果
地方交通線の営業線で走行試験を実施したときの,車体上下振動加速度パワースペクトル密度(PSD)の例を図7に示します。約1.7Hz に大きなPSD ピークがみられますが,ダンパを制御することにより,1~2Hzの周波数帯の振動が低減され,このピークが約1/5に減少しました。この結果,鉄道車両の乗り心地の評価指標として一般的に使用されている「乗り心地レベル(LT値)」は約4dB低減され,体感上明らかな乗り心地向上効果が得られました。LT値は小さいほど乗り心地がよいことを示し,一般に3~5[dB]程度LT値が異なると乗客が乗り心地の差を体感できるとされています。
図7の加速度PSDは,ある特定の区間での振動低減効果例でしたが,走行区間全線での振動低減・乗り心地向上効果を調べた結果を図8に示します。これは,短時間LT値と呼ばれ,LT値を1分以下の短い区間で区分的かつ連続的に計算したものです。この値は,各走行地点での乗り心地を表しています。走行試験区間の長さが50km程度ありますが,全区間にわたり,制御を行った場合の方が行わない場合よりも短時間LT値が低減され,乗り心地が向上していることがわかります。また,短時間LT値が大きい区間でのLT値低減効果が高く,乗り心地が悪い区間で特に振動低減効果を発揮していると言えます。
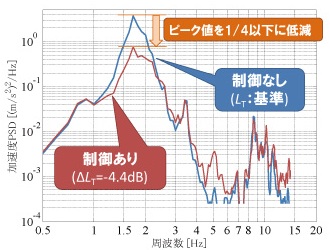
図7 台車直上 車体上下振動加速度PSD
(地方交通線走行試験結果 走行速度 75km/h)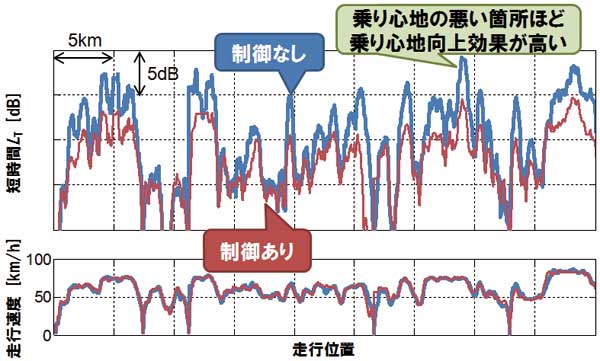
図8 短時間乗心地レベル(LT) の比較
4 おわりに
開発した装置は,2011 年3 月に営業運転を開始したJR九州の観光特急列車「指宿のたまて箱」に搭載され,営業運転が行われています(図9)。鉄道車両で上下振動制御装置が営業列車に搭載されたのは,この列車が初めてです。装置搭載後,まもなく2年が経過しようとしていますが,大きなトラブルもなく順調に稼働しています。また,このほかにも,2012 年から特急「はやとの風」にもこの装置が搭載さており,地方交通線の上下乗り心地向上に貢献しています。

図9 JR九州 観光特急列車「指宿のたまて箱」
(車両構造技術研究部 車両振動 主任研究員 菅原 能生)
[研究&開発]リニア技術を渦電流レールブレーキへ応用する
1 はじめに
鉄道総研では非粘着ブレーキの検討として「渦電流レールブレーキ(以降,レールブレーキ)」に着目し,磁気浮上式鉄道の開発過程で培ったリニアモータ技術を応用することで実用化における課題を解決しようと取り組んでいます。本稿では,このリニア技術を応用したレールブレーキについて紹介します。
2 レールブレーキとリニアモータ
従来のレールブレーキには幾つかのタイプがあります。代表的な実用例として,ドイツの高速鉄道ICE3 にレールと接触しないタイプ(渦電流レールブレーキ),フランスの高速鉄道TGV POS などにレールと接触するタイプ(吸着渦電流レールブレーキ)が用いられています。
渦電流レールブレーキは台車下部にレールと空隙を介して直流電磁石を配置し,走行時の電磁誘導現象を用いてレールに渦電流を発生させ,電磁力によってブレーキ力を得る装置です。非接触動作であり,粘着係数変動や輪重変動などに依らない安定したブレーキ力を発生することができます。また,高速でもブレーキ力が殆ど低下しないという特長があります。しかし,渦電流によるレールの温度上昇や,停電等の異常時における励磁電力の確保が課題とされ,日本では実用化に至りませんでした。
吸着渦電流レールブレーキは電磁石表面にシューを設けてレールと接触させてブレーキ力を得る装置です。渦電流による電磁力と磁気吸引力による接触摩擦力を併用したものです。レールの温度上昇が低く,励磁電力も小さくなるという利点がありました。しかし,シューとレールの接触によってレールの表面に白色層を生じる問題が判明し,実用化に至りませんでした。
一方,これらレールブレーキのようにレールに直接,電磁力を発生させるレール対向型リニアモータの研究も過去に国内外にて行われていました。レールに対して発生するリニアモータの推力を力行に用いようとするものです。しかし,このリニアモータも当時の電力変換器(交流電流の調整を担う)では,実用に適うほどの長所を得ることができませんでした。
3 渦電流レールブレーキへのリニア技術の応用
国内でレールブレーキの開発が行われた過去と比べると,リニアモータ及びその周辺技術は大幅な進歩を遂げています。そこで,再び渦電流レールブレーキに着目し,現在のリニアモータ関連技術を応用することで,かつての課題を解決できる可能性があるリニアモータ型渦電流レールブレーキ(以降,リニアレールブレーキ)を考案しました。
リニアレールブレーキはレールと空隙を介して交流電磁石(電機子)を配置したものです(図1)。大きな特長として,励磁動作に要する電力(励磁電力)を電機子自身が発電するという機能を持ちます。ブレーキ動作時において,発電した電力に相当する分だけレールの温度上昇が低減され,更にその電力を電機子自身の励磁電力に充当するので外部から電機子に電力を供給する必要がありません(図2)。積極的に発電を行えばレールの温度上昇はそれに応じて低減されますが,仮に余剰な発電電力の処理を主回路に依存させると,その主回路に異常があった場合にリニアレールブレーキも使用できなくなります。そこで,発電する電力は敢えて電機子自身で消費される励磁電力と平衡させるものとし,容量最小化と独立性を重視した励磁制御方法を考案しました。この制御方法によれば,待機時の制御電源を兼ねた小容量バッテリをインバータ毎に備えることで,停電や編成分離事故が起こってもブレーキ動作が可能な励磁システムを実現できます。
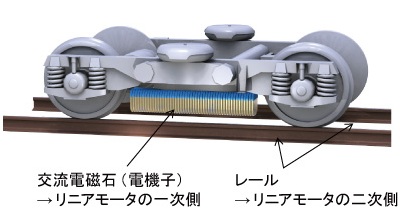
図1 リニアレールブレーキの基本構成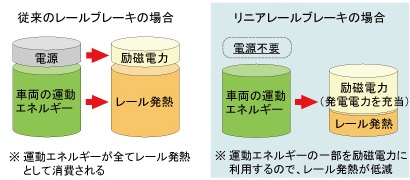
図2 エネルギー変換の比較
4 地震等に有効なブレーキとしての期待
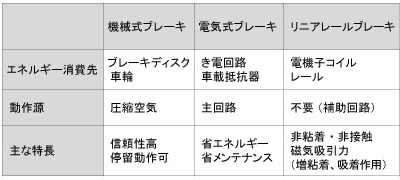
表1 にブレーキシステムの比較を示します。リニアレールブレーキはブレーキ時のエネルギーの消費先,動作源,特長の全てが他のブレーキとは異なり,フェイル要因を共有しない,完全に独立したブレーキシステムとなります。また,ブレーキ力に加えて電機子とレールの間に磁気吸引力が働き,車輪とレールの間の接触圧を増加させるので,粘着によるブレーキ力を向上させる効果も得られます。ここで,電機子は普段は台車枠下に引き上げておき,動作時だけレールとの空隙を保持するために軸箱に荷重を載せることが想定されています。それ故,磁気吸引力は軸箱と台車枠の間の軸ばね(1次ばね)に影響を与えることなく,直接,車輪をレールに吸着させるように働きます。試算によると,これにより地震時に脱線防止効果が得られることも判明しています。磁気浮上式鉄道(リニモなど)ではこのような磁気吸引力を台車とレールの間の磁気支持力として利用していますが,今後は従来の鉄道車両においてもその活用を検討する価値があると考えられます。
-
表1 ブレーキシステムの比較
5 リニアレールブレーキの開発
リニアレールブレーキの研究開発にあたっては,ブレーキ力のみならず電気機器としての特性を把握する必要がありま
す。始めは電磁界解析を用いてそれらを検討しました。また,解析検討と平行してベンチ試験装置を製作し,電磁界解析の
妥当性を検証する為のデータや,概念設計モデルの基礎データなどを蓄積してゆきました。これらより,リニアレールブ
レーキの予測性能,設計方法,励磁システムの仕様及びその制御器の設計などの実機開発の基礎となる知見を整理しまし
た。
この段階で軌条輪試験に供するプロトタイプ及び励磁システムを試作し,軌条輪台上にて0~300km/hの模擬走行試験を実施しました。その結果,速度50km/h以上において目標とする5kN(台車当り10kN)のブレーキ力が得られること(図3),レールの発熱が発電電力に応じて低減されること,励磁電源を用いずに自己発電によるブレーキ動作を実現できることなどが実証されました。実証されたブレーキ力は,仮に新幹線や在来線特急列車の編成内の全台車にリニアレールブレーキを搭載した場合,最高速度からの制動距離を現在の約半分~3分の2に短縮する能力があります。また,磁気吸引力については速度に応じて約10~25kN(台車当り約2~ 5 トンに相当)でした。
なお,現在は構内走行試験用のプロトタイプを製作し,性能評価を行っています(図4)。
-
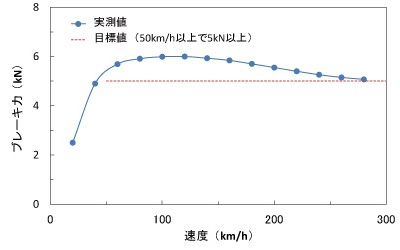
図3 軌条輪試験の結果(台車の左右片側当り) -
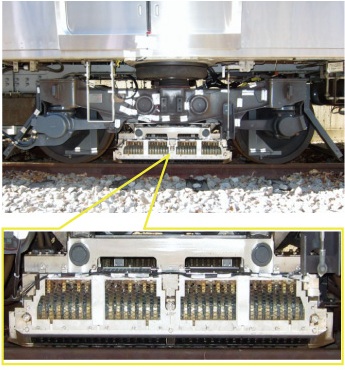
図4 構内走行試験用のプロトタイプ
6 おわりに
リニアレールブレーキは非粘着の特長のみならず,新たな付加価値を具備することでブレーキ技術の「次の一手」となることを目指して研究を進めています。今後も関係各位のご理解,ご協力を賜れば幸いです。
(浮上式鉄道技術研究部 電磁力応用 副主任研究員 坂本 泰明)
[リポート]IECON 2012に参加して -inカナダ-
1 はじめに
2012年10月25日から28日までの4日間,IECON2012(正式名称:The 38th Annual Conference of the IEEE Industrial Electronics Society)がカナダのモントリオールにて開催されました。この会議に参加し,発表しましたので報告いたします。
2 会議の概要
IECON はIEEE(The Institute of Electrical and Electronics Engineers:日本名では「米国電気電子学会」と言われることが多いです)の分科会IES( Industrial Electronics Society)が毎年開催しています。パワーエレクトロニクス,電気機器,エネルギー,制御,電気自動車,ネットワークなどといった電気の産業応用に関する幅広い分野について世界中から論文が集められています。今年は過去最大の1346 件もの投稿があり,そのうち1004 件が採択されています。911 件がオーラルセッション,93 件がポスターセッションでの発表でした。日本からの参加者も多く,東京大学,慶應義塾大学といった大学関係者も多く参加していました。会場の風景を図1 に示します。
会場はモントリオール中央駅から徒歩15 分程度の場所にあるETS(École de Technologie Supérieure,工業高校)で実施されました(図2)。開催されたETS は北米で3 番目に大きい規模の工業高校だそうです。

図1 会場の風景(ポスターセッション)
図2 会場の外観
3 発表の内容
主催者が産業応用を強く意識した分科会です。そのため産業応用先の一つである交通機関に関する興味深い講演も数多くありました。講演の一部を紹介します。
3.1 パワーエレクトロニクスの信頼性1)
基調講演ではパワーエレクトロニクスの信頼性に関する話題がありました。鉄道総研でも電子機器の信頼性の研究をしており,非常に身近に感じる話題でした。本講演では2.3MW の風力発電システムに焦点をあてて故障の分析をしておりました。システムとして最も故障率が高い箇所が電力変換部であるとのことです。また故障の要因としては温度やサイクル数によるものが最も多いそうです。そこで鉄道でもなじみの深いIGBT モジュールにスポットを当て,温度上昇や温度分布を調査した結果を紹介していました。
パワーエレクトロニクス技術が進展してきた現在,改めてパワーエレクトロニクスの信頼性,特にIGBT モジュールの信頼性の向上は鉄道に限らず必要な技術と感じました。
3.2 SMT(Société de transport de Montréal)社の講演
モントリオール市内のバスおよび中心部の地下鉄を営業しているのがSTM 社です。モントリオールを訪れたほとんどの人がSTM 社を使用しているのではないでしょうか。ランチセッションではそのSTM 社の講演を聞くことができました。ケベック州政府はモントリオールの輸送機関のエネルギー源の95%をクリーンエネルギーにするよう目標設定しました。それに伴うSTM 社の取り組みに関する講演でした。
バス部門では,約1300 台のバスを2025 年までに電気を使用したバスに置き換えていく方針だそうです。それに向けてハイブリッド車を導入し始めています。また,新技術に関しても検討しており,架線を一部に張ることでトロリーバスを導入することや路面電車を市内に復活させることも選択肢にあるようです。
地下鉄部門は4 路線総延長71km であり,総保有車両数は759 両です。現在は1965 年から製造されたMR-63 型(図3(a))と1976 年に製造されたMR-73 型で運行されております。環境に対する取り組みの一環として,新たに導入予定のMPM-10 型について言及されました(図3(b))。従来は発電ブレーキを用いていましたが,新たに回生ブレーキを採用するそうです。従来車両より8%質量が増加するものの,回生電力を効果的に使用することにより20 ~ 25%の省エネや,機械ブレーキの使用量を最小限にすることを可能とするようです。鉄道総研の開発したHi-tram も回生電力の有効活用の観点から開発されており,質量が多少増えても回生ブレーキを有効に活用すれば省エネになるという考えが浸透してきていると感じました。MPM-10 型は2013 年に試作車が登場し,2014 年に営業に投入される見込みです。

図3 (a) MR-63 型*
図3 (b) MPM-10 型(2013 登場予定)*
4 会議以外の話題
4.1 カナダ鉄道博物館
実はモントリオールは鉄道と縁が深い都市です。カナダの主な鉄道会社の本社(VIA 鉄道やカナディアンナショナル鉄道)があります。また,2006 年には世界鉄道会議であるWCRR2006 も開催されております。さらに,モントリオール郊外にはExporail(カナダ鉄道博物館)があり,私も足を運びました。昔活躍した車両を中心として,多くの車両が屋内,屋外に展示されております(図4(a)(b))カナダの鉄道の歴史を垣間見ることができ,有意義な時間をすごすことができました。
Exporail までの交通の便は非常に悪いです。都心部バスターミナルから1 時間に1 本出るバスで終点に行き,乗り継いで行かなければならない不便な場所にあります。帰りはバスが予定通り来なかったためタクシーで都心まで戻ることになりました。近くまでAMT(Agence métropolitaine de transport)社の列車が走っていますが,通勤輸送に特化しており,Exporail に行くために有効な列車がほとんどありません。都心部の移動には便利なモントリオールですが,一歩郊外になると完全な車社会で公共交通機関を使用して移動するのは不便であるのが現状です。
4. 2 ハリケーン「サンディ」
会議自体は無事に終わりましたが,ちょうどアメリカ東海岸に記録的な被害を出したハリケーン「サンディ」が近づいている時期でした。ニューヨークやワシントンでトランジットする予定だった人は帰国時にサンディの影響を受けことと思います。自分も当初搭乗する予定だったモントリオールからワシントンへの便が欠航することを前日に知り,対応に追われました。航空会社に相談した結果,幸い通常運航だったモントリオールからシカゴへの便に変更することができ,足止めされることなく当初予定通りに帰国できました(そのため最終日はほとんど寝ずに宿を出ることになりました)。初めての海外出張であったこともあり,日本に無事帰国した時は心底ほっとしました。

図4 (a) 展示車両(屋内)
図4 (b) 展示車両(屋外)
5 おわりに
IECON2012の参加,発表を通じて,海外出張,国際会議での口頭発表,帰国時の対応など,非常に貴重な体験をさせていただきました。
次回のIECON2013 は2013年11月10日から13日までの日程でオーストリアのウィーンにて開催が予定されております。2014年にはアメリカで,2015年には日本での開催が予定されております。
参考文献
1) Huai Wang, Ke Ma, Frede Blaabjerg, “Design for Reliability of Power Electronic Systems”,The 38th Annual Conference of the IEEE Industrial Electronics Society
*出典
図3 (a):http://en.wikipedia.org/wiki/MR-63
図3 (b):”Press releases". Stm.info. Retrieved 2011-03-10
(車両制御技術研究部 駆動制御 研究員 仲村 孝行)

- Copyright(c) 2013 Railway Technical Research Institute