
[クローズアップ] 燃料電池車両の開発
1.燃料電池車両とは
現在、非電化区間を走行しているディーゼルカーの代替として、省エネルギー化・排気ガス低減・脱化石燃料を実現するこれからの鉄道に相応しい鉄道車両として開発が進められており、将来的には電車の代替も視野に入れています。この車両の開発にあたり、中心となる技術として燃料電池、水素タンク、バッテリーとのハイブリッド化技術などがあります。
2.燃料電池とは
水素などの燃料を用いて化学的に発電する電池を総称して「燃料電池」といいます。燃料と酸化剤の隔壁となる部材(電解質)の材料によりいくつかの種類に分類されますが、常温から起動可能で小型軽量な「固体高分子型」が自動車などの移動体用として最も開発が進んでおり、鉄道車両への適用に対してもこの方式が有利と考えられます。燃料から電気エネルギーを取り出す効率が高く、排気は反応の際に発生した水と反応しなかった空気の残りだけという大変クリーンな電源です。名前に「電池」と付きますが、これは英語の“Fuel cell”のcellを和訳した際に「電池」としたことによるもので、「電池」といっても充電はできません。
3.燃料電池車両導入の効果
燃料電池車両を非電化区間を走行するディーゼルカーの代替とすることにより以下のような効果が期待できます。
・消費エネルギー低減
燃料電池の高効率(約50%)、ブレーキ時の回生エネルギー有効利用、アイドリングストップなどの効果により従来のディーゼルカーと比較して半分以下の消費エネルギーとなることが期待できます。
・発生CO2低減効果
水素の原料として天然ガスを使用した場合、同じ走行を行うディーゼルカーと比較して1/3に低減することが可能です。水素生成に水と自然エネルギーを使用すれば、CO2フリーとする可能性もあります。
・その他の効果
排気は反応により生成された水と使われなかった空気だけなのでPM(粒子状汚染物質)などの排出や臭いが無く、エンジンに起因する振動・騒音の低減が期待できます。また、駆動装置等は電車と共通化が図れます。

図1 100 kW 級燃料電池(左)と試験電車(右)
4.燃料電池車両の開発状況
100kW級燃料電池とリチウムイオンバッテリーとのハイブリッド構成による試験電車を図1に示します。この試験電車の主回路構成を図2に示します。加速時は燃料電池とバッテリーのハイブリッドパワーにより力行し、減速時はモータによる回生電力をバッテリーに充電することによりブレーキ力を得ます。この加速時と減速時のエネルギーの差分を燃料電池で発電することにより、バッテリーはほぼ同じ充電量に保持することができます。現時点では2両編成の試験電車を加速・減速するハイブリッド制御まで確認しており、燃料電池の耐久性確認のための走行試験を継続しています。
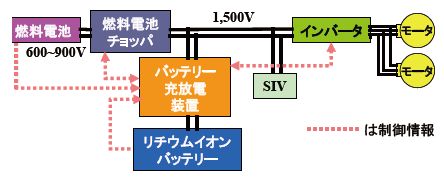
図2 燃料電池・バッテリーハイブリッド構成
5.燃料電池車両の課題と今後の動向
このように実用化できれば様々な効果が期待される燃料電池車両ですが、実用化にあたっては、燃料電池の低コスト化、大出力化・小型軽量化など燃料電池自体の課題の他、現状では燃料となる水素が燃料として普及していないことによる、水素のコストが高いことが課題として挙げられます。しかし、2015年に燃料電池自動車の一般販売開始を受けて、燃料電池自体が自動車以外の民生製品にも広く普及していくことが予想されます。このように燃料電池の普及条件が整ったときにはすぐに実用化できるように鉄道車両への適用の開発を進めます。
(車両制御技術研究部 部長 山本 貴光)
[研究&解説] 鉄道の発展に向けたシミュレーション技術
1.はじめに
今年の10月,東海道新幹線開業50周年を迎えるにあたり,当時を振り返ると0系新幹線車両の開発では当初より車両構体の強度計算などに米国製電子計算機(Bendix製 G-15D)が活用されていましたが,数十元の連立方程式を解くレベルでした。この電子計算機は,旧国鉄鉄道技術研究所(鉄道技研)により国鉄初のオンライン座席予約システムの開発に向けて導入されました。1960年代に入ると列車運行といった輸送情報系のシミュレーションが主に行われると共に,構造解析,車両運動,地震動解析など技術開発にも活用されて多くの成果を挙げるようになりました。
1987年にはスーパーコンピュータ(NEC製 SX-JAG)が導入され,「浮上式鉄道の開発」,「新幹線の300km/h化」等の重要課題において数値シミュレーションが活用されました。コンピュータの高性能化に伴い,数値シミュレーションは実験や理論を補完するだけでなく,実現が困難な条件をコンピュータ上で再現し,現象を評価するツールとなりました。
鉄道総研では,長年,非常に多くの分野で数値シミュレーションによる研究開発が進められており,自前のスパコンだけでなく,「地球シミュレータ」や「京」も視野に入れ,鉄道システムの最適化と複雑な現象の解明に向けて解析技術の向上に取り組んでいます。
現在,検討されている研究開発のひとつに「新幹線の高速化」がありますが,解決すべき課題の多くは,目標速度での実験が困難なため,数値シミュレーションが不可欠です。例えば,高速走行時の列車の走行安定性,高速走行時の沿線に対する騒音や地盤振動などの評価です。また,新幹線に限らず,車両や軌道の保守の効率化,鉄道の安全性向上や省エネ化といった課題では,数値シミュレーションが列車走行時の現象解明や最適な条件を求める際の有用なツールとなります。
2.車両運動シミュレーション
鉄道車両が軌道上を安定的に走行するため,また最近では乗り心地の向上のため,操舵機構や車体傾斜機構、あるいはアクティブサスペンションなどの導入によって台車構造が複雑化しています。このような車両の走行状態を評価することは重要な課題であり,マルチボディダイナミクス(MBD)によるシミュレーションが行われています。さらに,車両,台車枠,輪軸,軌道など従来剛体として扱われていた機械要素も弾性体モデルが導入され,より高精度な評価が可能となりました。たとえば分岐器通過時の車両の挙動や車輪・レール間の接触挙動が非常に複雑であり,理論解や実験による計測が困難です。これらの挙動をシミュレーション(図1)により知ることは,走行安定性や乗り上がり脱線などの評価において重要であり,安全性評価に活用されています。
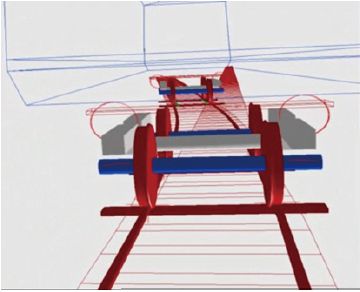
図1 分岐器通過時の車両運動シミュレーション
3.空気流シミュレーション
鉄道車両の空力特性を把握することは,鉄道の安全・安定輸送の実現や騒音低減など環境対策を行う上で重要です。空力特性の評価は,通常,車両模型を用いた風洞実験により行われています。ただし,空気流の計測そのものが容易ではないことから,風洞実験を補完して空力特性評価をより精緻に行うため,空気流シミュレータを開発しています。
本シミュレーションでは,直交格子法を用いて大規模数値計算を実現し,三次元空間の詳細な流れ場を求めています1)。図2には走行する車両周りの風の流れについて数値的に再現した例を示します。さらなる現象解明にむけて,編成車両の車体周りや車両床下の空気流シミュレーションを予定しています。
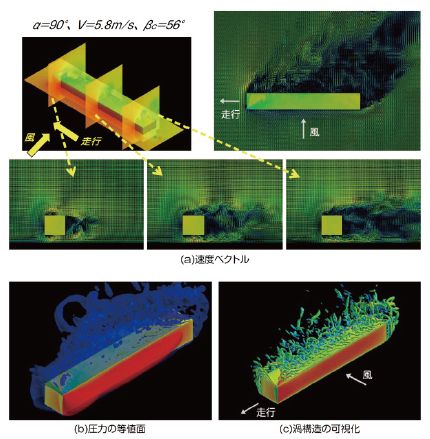
図2 横風を受ける車両周りの流れ
4.車輪・レール間の動的接触シミュレーション
車輪やレールには,走行時に衝撃力や振動荷重が加わるため,両者の接触面は厳しい負荷を受けます。これらの負荷が長期的に繰り返し作用すると,波状摩耗やシェリングといった特異な摩耗やき裂などが生じる場合があります。レールに摩耗やき裂があると列車走行時に異常な振動が生じて,騒音や乗り心地が悪化します。
これらの劣化現象の解明には,空間的にも時間的にも非常に細かな解像度のモデルが必要なため,スパコンを活用した大規模並列計算が行える有限要素解析手法を開発しました2)。これにより車輪/レール間の動的転がり接触挙動を再現して劣化現象の解明につなげたいと考えています。(図3,4)。
なお,バラストや高架橋などの構造物も車輪とレールの動的な接触挙動評価に影響を与えると考えられるため,後述のバラスト挙動シミュレーションとの連成解析の実施も検討中です。
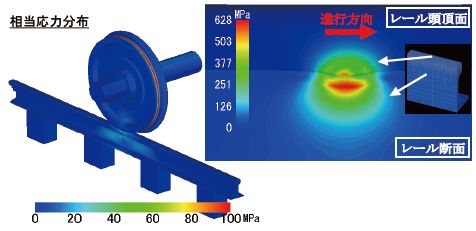
図3 車輪・レール間の弾塑性動的転がり接触解析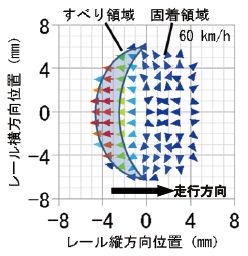
図4 走行速度と輪重減少率との関係
5.バラスト挙動解析
軌道のバラスト層については,列車の動荷重によりバラストが摩耗し,軌道沈下が生じます。このため,定期的な補修作業が必要となっています。しかし,この劣化現象の力学的メカニズムは未だ解明されていません。そこで,弾性体個別要素法(QDEM)3)によりバラストの複雑形状をさらに細かい弾性要素の集合体で表現し,列車走行時のバラスト層内部における波動伝播現象および応力集中現象(図5)を詳細に再現できるツールを開発しました。これにより,車両通過時にバラストに作用する衝撃力によるバラスト層の沈下といった軌道の劣化現象の解明につながるものと考えています。沈下現象が明らかになると軌道の保守の効率化が図れるものと期待しています。
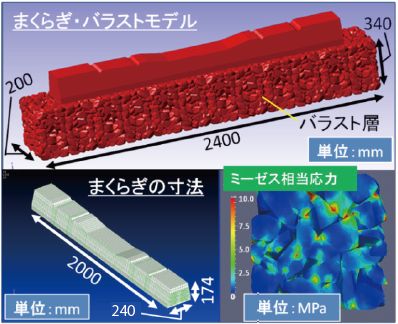
図5 まくらぎ・バラストモデルとバラスト稜角部の応力集中
6.おわりに
鉄道分野の数値シミュレーションは,前述のように機械,土木,電気,情報,防災など,多岐分野にわたっており,ここで紹介した事例以外にも数値シミュレーションを活用した数多くの研究開発が行われています。今後も計算工学の重要性は高まるばかりです。今では,0系新幹線車両が開発された頃とは比較にならない非常に高度なシミュレーションが可能であり,新たな技術開発において不可欠なツールであることは明らかです。しかしながら,実験等が困難な現象のシミュレーションでは,V&V(検証と妥当性確認)が難しい場合が多々あります。そのような時でも信頼性の高い計算が実現されているのかどうかを判断できる工学的な知見を身につけることを忘れて
はいけないと思います。
参考文献
1)中出孝次:走行する車両周りの風の流れを再現する,RRR, Vol.70, No.9, pp.16-19, 2013
2)高垣昌和,奥田洋司ら:動的転がり接触解析による車輪・レール間の挙動評価,日本機械学会第25回計算力学講演会論文集, F-503, 2012
3)西浦泰介,阪口秀:離散体モデルを用いたバラスト軌道の GPUシミュレーション,日本計算工学会第19回計算工学講演会, B-3-4, 2014
(鉄道力学研究部 計算力学 室長 高垣 昌和)
[解説] 空転防止と再粘着制御 -PART 1-
本稿は『RRR Vol.78 8月号』(2014.8発行)より「鉄道技術 来し方行く方」の内容を一部編集したものである。
1.鉄車輪・鉄レール系のけん引の歴史
けん引とは物を引っ張ることであり,物を移動するための手段として古代から用いられてきました。
17世紀に蒸気機関が発明され,1804年,鉄車輪で鉄レール上をけん引走行する蒸気機関車ペニダーレン号がRichard Trevithickによって開発されました。当初,滑らかな車輪と滑らかなレールが接触するだけでは,安定したけん引力を確保できないとの恐れから,1812年,けん引力の欠如を防ぐ目的で,歯車でけん引力を伝達するラック・アンド・ピニオン方式を採用したサマランカ号(図1)がJohn Blenkinsopにより開発されました。現在,この方式は山岳鉄道で急こう配区間を走行する車両に利用されています。1813年,William Hedley(図2左)は,歯車の必要性を疑い,動輪摩擦実験装置(図2右)を開発して,空転とけん引可能な貨車数や勾配などを調査し,最初の粘着方式の営業機関車としてパシフィックビリー号を開発しました1)。
1825年,George Stephensonによって公共鉄道に蒸気機関車が使用されてから,鉄道は瞬く間に世界に広がりました。1900年前後には,ディーゼル内燃機関や電動機による動力源を持った鉄道車両が開発され,最近では,電気機器や半導体技術の進歩により,数万トンけん引可能な機関車列車や300km/h超の高速電車列車が実現しています。
図1 サマランカ号
(出典:Public Domain,
Wikimedia Commons)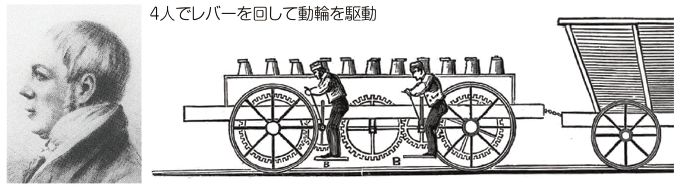
図2 ウィリアム・ヘドレー(左)と動輪摩擦実験装置(右)
(出典:(左)Public Domain, Wikimedia Commons/(右)Osward Dodd Hedley, “Who invented the Locomotive Engine?”, Ward and Lock, 1858. 画像:Googleブックスより)
2.空転現象
鉄道は転がり摩擦が小さく,他の輸送機関に比べて省エネですが,摩擦係数も小さく滑りやすい特性があります。
摩擦係数が小さいと動輪に空転が生じやすくなり,空転によりレールが損傷します。図3の写真は,ある走行試験で大きな空転(空転速度3~10km/h)が生じたときのレール損傷です。このような傷によりレールに亀裂が入りやすくなり,最悪の場合では折損に至ることもありますので,空転を防止する必要があります。
図4は原動機により車輪踏面のレール方向に引張力が働き,その反力が車両を加速させる力(加速力)となることを示しています。引張力を軸重で除した値をトラクション係数と呼び,その係数が大きくなるほど滑りやすくなります。すべり始めるとトラクション係数は小さくなる傾向にあり,最大値を粘着係数と呼びます。

図3 空転により生じたレール損傷例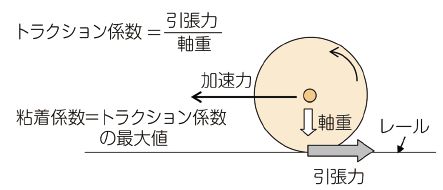
図4 加速・減速と引張力
1944年,PflanzはMetzkowの行った走行試験のチャートを分析し,すべり速度に対するトラクション係数の変化をおそらく初めてグラフ化(図5)2),すべり速度が大きくなるとトラクション係数が低下する現象を示しました。
粘着係数はどの線区にどのタイプの機関車を配置するかを決めるために重要な指標です。図6は,1960年に測定されたフランス国鉄電気機関車BB16500で行われた粘着係数測定の結果です。興味深いのは,平均に対して粘着係数のバラつきの分布幅が60%に及んでいることです。日本の機関車等でも同様に調査報告が行われていましたが,ここまでの分布幅はない場合が多いようです。走行場所や天候等によって大きく変わることや,どこで空転したかを判断することが難しく,測定処理方法によっても変わります。捉えることが難しく見えるこの現象のどこを使えば営業走行が可能となるか知る必要があります3)。
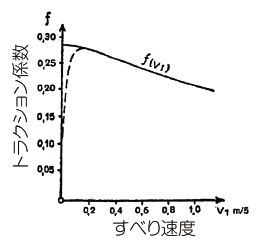
図5 すべり速度とトラクション係数
(出典:Karl Pflanz, Prag.:“Rad und Schiene als Reibungsgetriebe”, Elektrische Bahnen, HEFT 1/2, Januar-Februar, 1944)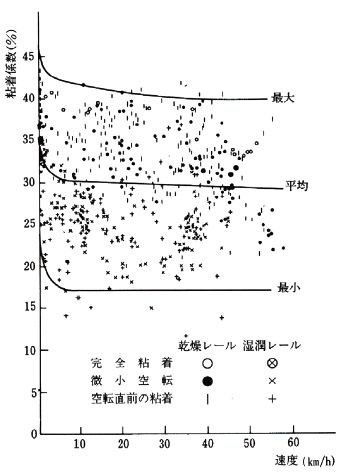
図6 粘着係数とその分布(BB16500 機関車)
(出典:入江則公:「交流電気車両の基礎理論」、1984)3)
以前公表された粘着係数特性(粘着係数の近似式)の代表例を図 7に示します。速度上昇とともに粘着係数が低下している現象は,車輪やレール間の水膜厚さや,車体や台車振動により軸重が動的に変動するなどの要因が推察されます。一方,速度に依存しない場合もいくつか報告されています。また,ヨーロッパの粘着係数の実験式がいずれも平均値に対して求められているのに対し,日本では下限値に着目して実験式が求められています(図8)2)3)4)。
一般的に相対運動する二面間の湿潤状態と摩擦係数を説明するために,ストライベック曲線(図9)が用いられます。車輪レール接触に関しては,表面粗さ,水の粘度,水膜厚さ,すべり速度,軸重の因子が摩擦係数に影響します。摩擦係数を向上させて高いけん引力を得るには,車輪・レール踏面の粗さを確保し,軸重(荷重)を大きく,すべり速度を小さくすることが有効とされています。
今回は,鉄レールと鉄車輪によるけん引の歴史と粘着現象等についてご紹介しました。次回は,空転防止対策について紹介します。
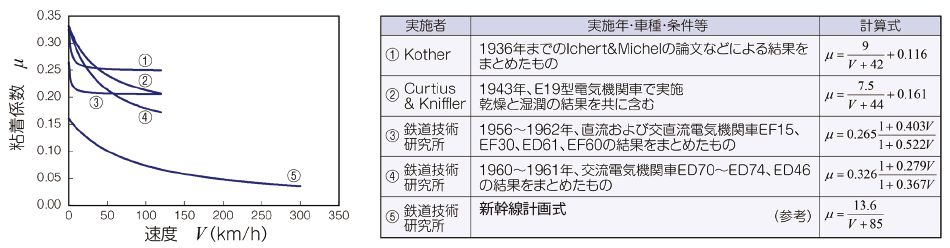
図7 粘着係数と速度特性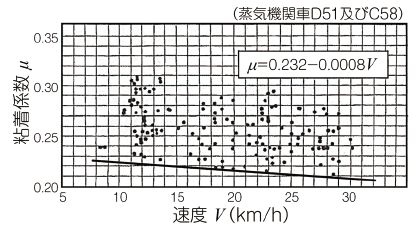
図8 蒸気機関車粘着係数測定結果(レール湿潤時)
(出典:「鉄道業務研究資料」、第2巻、第21号)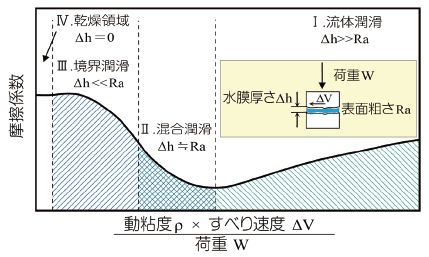
図9 ストライベック曲線
参考文献
1) 水島とほる:「蒸気機関車誕生物語」、グランプリ出版、2004
2) 渡邉朝紀:「空転・滑走検知、再粘着制御研究の内外の歴史と最近の動向」、電学誌、122巻、9号、2002
3) 入江則公:「交流電気車両の基礎理論」、1984
4) 「速度定数業務必携」、日本国有鉄道、運輸局、1984
(車両制御技術研究部 駆動制御 主任研究員 山下 道寛)
[海外出向リポート] ラピッドプロトタイプ台車の性能向上 ―ブリストル大学との共同研究―
1.はじめに
鉄道総研では現在,英国ブリストル大学と共同でラピッドプロトタイプ台車(または可変特性試験台車,以下ラピッド台車)の性能向上に関する研究に取り組んでいます。本稿ではブリストル大学での研究内容やこれまでに得られた成果について報告します。
図1に示すようにラピッド台車は台車に9本の電動アクチュエータを組み込み,アクチュエータの動作を適切に数値制御することで台車の特性を自由に変更できるように設計されています。つまり,各アクチュエータはまるでカメレオンのように様々な部品の挙動を真似ることができ,各部品を実際に試作して台車に取り付けなくとも,仕様の変更によって変化する台車全体の運動特性を評価することができます。台車開発のプロセスにおいて開発品を試作する前の段階で台車の安定性や乗り心地などの運動特性を評価できることから,完成した台車の性能を正確に予測して仕様の検討に反映でき,結果的に台車性能の向上や開発コストの低減,開発期間の短縮につながることが期待できます。ラピッドプロトタイプ(すばやい試作)という名前はここに由来しています。
近年,数値計算で車両の運動特性を予測し,設計や仕様検討に反映することにますます注目が集まっています。しかし,実際の車両には微小な隙間や摩擦などの非線形性のほか,部材の弾性変形,車輪とレールの転がり接触など数値計算では正確に再現することが困難な現象が未だ多くあり,実物を用いたベンチ試験や走行試験は依然として重要な位置を占めています。ラピッド台車はまさにこれら双方の得意分野を活かそうとしたものです。
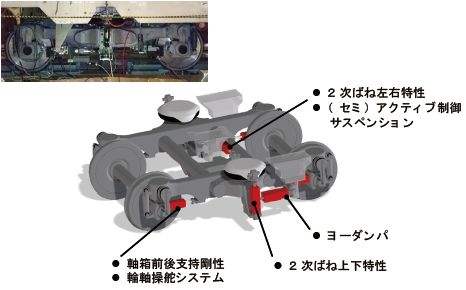
図1 ラピッドプロトタイプ台車
(赤い部分は電動アクチュエータ,模擬できる特性を付記)
2.ラピッド台車の実用化に向けた課題
以上のように魅力的な特長を持つラピッド台車ですが,実用化までに解決すべき課題がいくつか残されています。図2に示すようにラピッド台車は模擬対象部品の挙動を計算する計算機と,アクチュエータを組み込んだ実物の台車とで構成されます。アクチュエータ等に取り付けたセンサから得られた情報を基に模擬される部品の挙動を計算機がリアルタイムに計算し,アクチュエータを制御します。この計算機と実物の台車との境界にあるセンサやアクチュエータなどに,ラピッド台車が抱えているほぼ全ての技術的課題が集約されています。
例えばアクチュエータの応答が指令に対して遅れたり,異なるアクチュエータ同士が制御中に相互に干渉してしまう場合,模擬する部品特性の再現性が低下し,ラピッド台車の評価精度が損なわれることになります(図3)。ラピッド台車を使いやすく正確な試験装置として実用化するためには,このような障害を克服してアクチュエータを高速,高精度に制御する技術が不可欠です。これはラピッド台車にとって縁の下にありながらも重要な技術といえます。
ブリストル大学D.P.Stoten教授のグループは,ラピッド台車のように実物と計算機を協調させた試験方法を対象として,アクチュエータの応答遅れなどを補償する制御手法を従来から研究しています。筆者も昨年10月からブリストル大学に出向し,Stoten教授の指導の下でラピッド台車向けアクチュエータの高精度な制御手法の確立を目指して研究しています。ブリストル大学においてこれまでに得られた成果について以下に述べます。
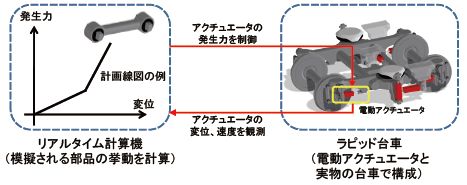
図2 ラピッド台車の動作のしくみ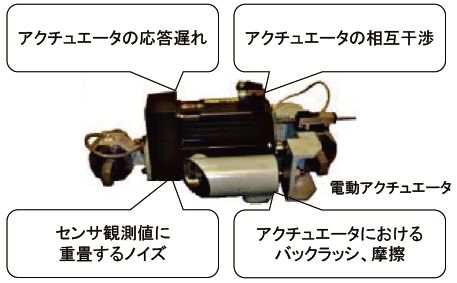
図3 ラピッド台車の性能を低下させる主な要因
2.1 これまでに得られた成果
①アクチュエータ応答遅れの対策
アクチュエータの応答特性に応じて適切な制御入力を算出することで,望ましい応答が得られることを確認しました(図4)。
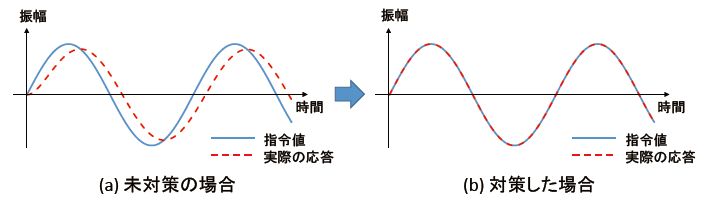
図4 アクチュエータ応答遅れの対策
②センサノイズの対策
センサ観測値に重畳するノイズを除去するためにカルマンフィルタを導入し,元の信号を推定することで効果的にノイズを除去できることを確認しました。さらにこの推定値をアクチュエータの制御に用いることで安定した制御が可能となることを確認しました(図5)。
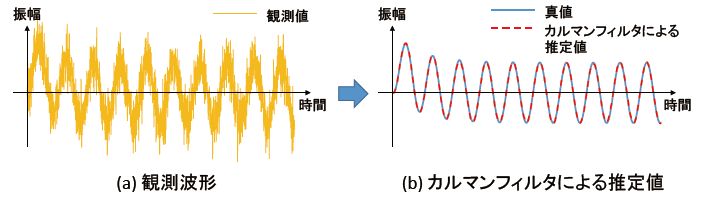
図5 センサノイズの対策
③アクチュエータ相互干渉の対策
ラピッド台車の各アクチュエータは従来個別に制御していましたが,一つの制御器で全てのアクチュエータを一括して制御することにより,アクチュエータ同士の相互干渉を抑えられることを確認しました。また,②のカルマンフィルタをこの制御器に統合し,状況に応じた最適なフィルタと制御器を同時に設計する手法を開発しました。
④アクチュエータにおける非線形性(バックラッシ,摩擦)への対策
アクチュエータの球面軸受などに存在するバックラッシ(ガタ)や摺動抵抗などの摩擦が制御性能を低下させることから,これらの非線形要素を考慮した制御手法を開発し,その有効性を確認しました。
2.2 ラピッド台車への有効性を数値実験で確認
ラピッド台車にこれまで開発した制御手法を適用し,台車の蛇行動現象を正確に再現できることを数値実験で確認しました。ここでは軸箱に取り付けられたモノリンクのゴムを対象としてアクチュエータでその挙動を模擬しました。
模擬対象の部品は蛇行動安定性に与える影響が大きいものの一つですが,図6よりアクチュエータを制御してその挙動を正確に模擬することにより,蛇行動の振幅,周波数などを評価できることが分かります。ラピッド台車を用いると模擬対象部品の特性をソフトウェアで設定でき,すぐさま蛇行動限界速度の変化等を車両試験台で評価可能となり,試作を繰り返すことなく台車性能を高めていくことが容易です。
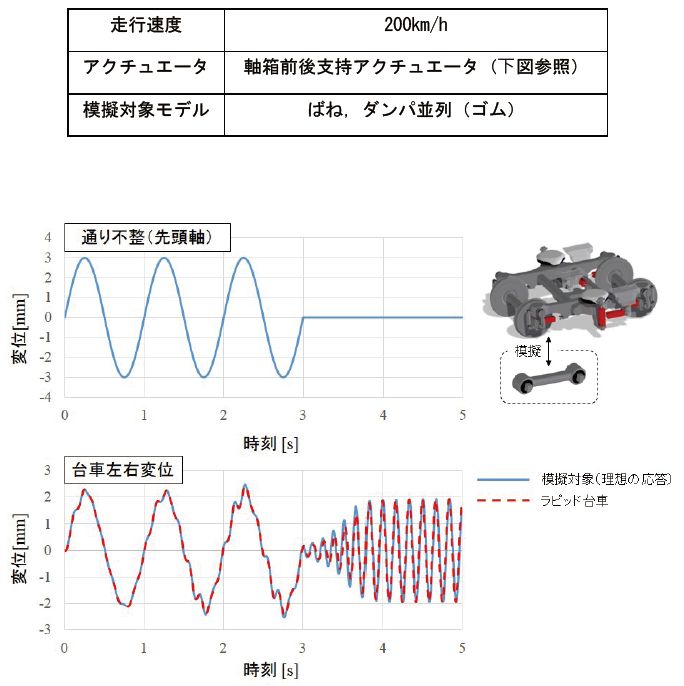
図6 ラピッド台車による蛇行動現象の再現結果(数値実験)
3.今後の方針
今後は開発した制御手法を実験で検証することに重点を置き,ラピッド台車に使用する電動アクチュエータを用いた簡易的な試験装置などで問題点のさらなる洗い出しとその解決を行います。これらの成果を実際にラピッド台車へ適用し,実用化に向けた性能の確認へとつなげていく予定です。
(総務部(人事)出向等(ブリストル大学) 山口 輝也)

- Copyright(c) 2014 Railway Technical Research Institute