|
制御付き振子車両の性能向上と乗り心地改善を図るため、地点検出方法などを刷新した次世代振子車両制御システムを開発しました。本システムは地点検出方法、振子パターンおよび振子アクチュエータの3つの要素から構成されます。
地点検出方法はGPS(全地球測位システム)の受信を基本とし、その状況に応じて曲率照合による方法や車輪回転数累積の長所を組み合せたもので、トンネル内を含むどのような場所でも走行地点を高精度で特定することが可能です。
振子パターンは車体を傾斜するときの目標値で、現行のCAモードに対してJT(Judgement function with TCT)パターンと呼び、走行速度と実測した軌道データ(曲率、カント)から、乗り心地評価指標を最良にするように演算、生成されます。
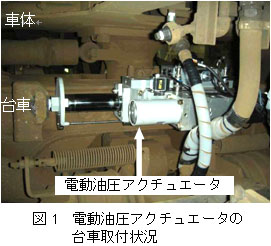
JTパターンに従って正確な車体傾斜を行うための電動油圧式の振子アクチュエータは、シリンダ、モータ、ポンプ、弁などを一体化した構造で、外部との接続は電気配線のみとなり、振子制御を行わない自然振子のときは振子ダンパとして機能します。台車に取り付けた外観を図1に示します。
走行試験における乗り心地アンケート調査の結果、従来システムに比べて乗り心地が良いと評価されました。さらに、左右低周波動揺の低減により、乗り物酔い発生率が2ポイント以上改善され、本システムの有効性を確認しました(図2)。
|