3.画像処理によるパンタグラフの接触力測定手法
- 画像処理によって架線/パンタグラフ間の接触力を測定する手法を開発しました。
- パンタグラフへのセンサ内蔵が不要、もしくはセンサ数の削減が可能なため、従来手法では接触力測定ができなかったケースでも測定が可能になりました。
電車線の設備状態を評価するために、架線/パンタグラフ間の接触力測定を活用することが期待されています。しかし、最近開発された可動すり板方式パンタグラフでは、接触力を求めるための測定点数が増えるため、従来のように全てのセンサを内蔵する方法では対応できないケースが見られるようになりました(図1)。そこで、内蔵するセンサ数を削減できる、画像処理による接触力測定手法を開発しました。
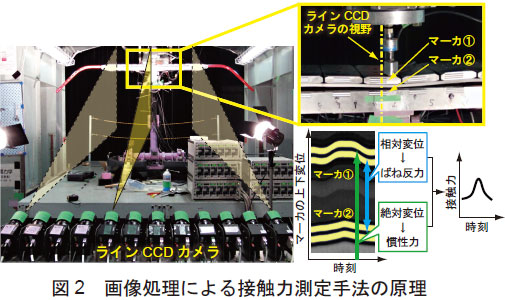
新しい接触力測定手法では、高い時間・空間分解能をもつラインCCDカメラをパンタグラフ近傍に複数台設置し、得られた画像情報から舟体に作用する慣性力と舟体を支持するばね系の作用力を求め、接触力に換算します(図2)。パンタグラフによっては、ストッパや上下案内部に作用する力の計測が必要となる場合もありますが、これらは部材変位に対して非線形な特性をもつため、画像処理では算出できません。そこで、これらの力を測定する内蔵センサもあわせて開発しました。
接触力の測定に多数の測定点が必要な多分割すり板方式パンタグラフに本手法を適用し、定置試験により接触力測定精度を評価したところ、従来の測定方法と同等の精度を有していることを確認しました(図3)。

- 研究・開発 > 主要な研究開発成果(2010年度) > V 基礎研究
-

RTRIホームページ - Copyright(c) 2011 Railway Technical Research Institute