1. Electro-hydraulic actuator with fail-safe function for steering system
- In order to decrease the lateral force in the transition curve, we developed an electro-hydraulic actuator with a fail-safe hydraulic circuit which can prevent the reverse steering.
- From the result of the running test on a test line, we confirmed that the new steering system was able to reduce the lateral force approximately by 60% compared with an existing steering truck.
- From the result of a bench test, we verified the fail-safe function in case of a reverse steering command.
A problem with existing bogie angle linked steering trucks has been than it is more difficult to effectively reduce the lateral force in transition curves than in circular curves.
We developed an electro-hydraulic actuator which was able to reduce the lateral force in transition curves while preventing the reverse steering action which is the largest problem of the active steering system.
The developed actuator, in addition to offering large generative force, high responsiveness and good maintainability is also small enough to be fitted to existing steering bogies.
From the result of the running test on a test line using an existing steering truck equipped with the developed actuator, we confirmed that the new steering system was able to reduce the average of the outer lateral force in the entry transition curve approximately by 60% (Fig.1).
In order to avoid rise of the lateral force in the failure situation such as a reverse steering command, we devised the fail-safe hydraulic circuit which was able to switch mechanically using the vehicle dynamics when running through a curve section (Fig.2).
From the result of a bench test, we confirmed that the steering force was not generated in case of a reverse steering command (Fig.3).
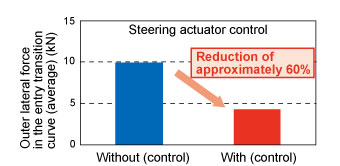
Fig.1 Results of running tests
Fig.2 Electro-hydraulic actuator with fail-safe function
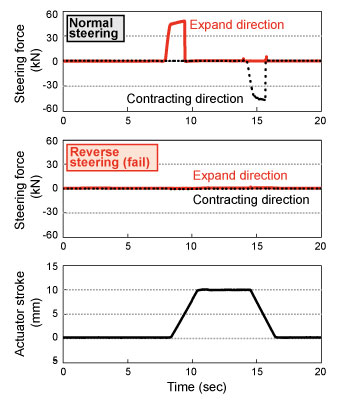
Fig.3 Failsafe function test results
- Research and Development > Major Results of Research and Development in Fiscal 2012 > IV Improvement of Convenience
-

RTRI HOME - Copyright(c) 2013 Railway Technical Research Institute