3. Increasing the tractive force of electric rolling stock through early detection of wheel slip convergence
- A method was developed to increase electric rolling stock tractive force through early detection of wheel slip convergence.
- The results from tests carried out with a shunting locomotive confirmed that after wheel slip detection there was a reduction of the drop in traction motor torque and tractive force was on average 5% higher.
Normally on electric rolling stock, slipping is detected using acceleration data and rotational acceleration from the rotor of the main traction motor. A slip is deemed to have occurred when the rotational speed and acceleration values exceed a certain threshold (slip detection), upon which the torque is lowered on the main traction motor in order to restore adhesion (Fig.1). Following this, the rotational speed reaches a peak and deceleration begins. When the slipping is thought to have started to converge (slip convergence detection), torque reduction is stopped.
An excessive fall in torque lowers the tractive force, consequently wheel slip convergence should be detected as early as possible to avoid this. Rotational speed and acceleration data include other vibration elements in addition to wheel rotation elements, which can lead to wheel slip detection errors, therefore, normally, data undergoes a smoothing process. Following on, acceleration immediately after a wheel slip gradually increases, whereas during slip convergence, there is a tendency to see a sudden drop in acceleration, which means that the acceleration change rates during wheel slip occurrence and wheel slip convergence differ several times over.
Therefore, focusing on the difference in changing rates, a proposal was made to say that when a large time constant was found during data smoothing this would be used for the detection of a wheel slip (signal to start torque reduction) and a small constant would be a sign of wheel slip convergence (signal to stop torque reduction) (Fig.2). Based on this approach, it should be possible to prevent excessive torque reduction by late detection of slip convergence, thereby satisfying the aim of improving tractive force.
In order to test the effectiveness of the above proposal, sprinkled water wheel slip tests were conducted with a new HD300 shunting locomotive. Test results demonstrated that the tractive force at around 0∼10km/h improved by over 5% on average (Fig.3). This method can be adapted for use on EMUs and for main line electric locomotives.
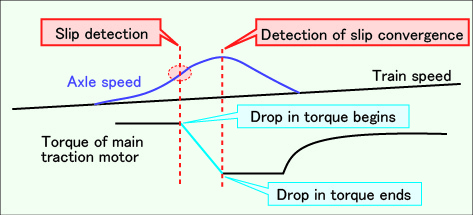
Fig.1 Slip detection and drop in torque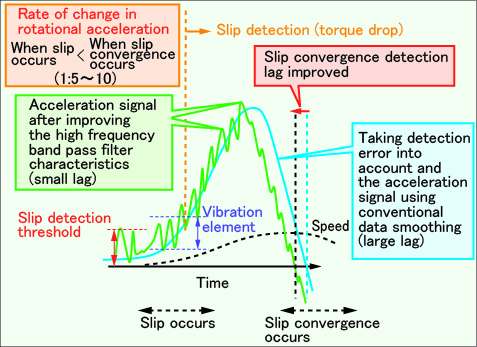
Fig.2 Slip acceleration data smoothing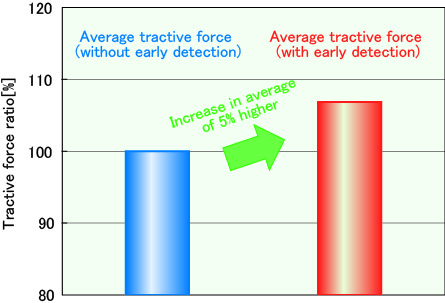
Fig.3 Results of field tests on real vehicle
- Research and Development > Major Results of Research and Development in Fiscal 2013 > IV Improvement of Convenience
-

RTRI HOME - Copyright(c) 2015 Railway Technical Research Institute