3.空転収束の早期検知による電気車のけん引力の向上
- 空転の収束を早期に検知して電気車のけん引力を向上せさる方法を開発しました。
- 入換機関車による試験を行った結果、空転検知後の主電動機トルクの引き下げ量が低減され、けん引力は平均5%以上向上しました。
電気車では通常、主電動機回転子の回転速度や加速度情報を用いて空転を検知しています。回転速度や加速度が閾値を超過した時に空転と判断(空転検知)し、再粘着させるために主電動機トルクを引き下げます(図1)。その後、回転速度が最大値となり減速を開始した時を空転が収束し始めたと判断(空転収束検知)し、トルクの引き下げを終了します。
空転時の余分なトルク引き下げは、けん引力を低下させるので、空転収束を適正に検知することが求められます。回転速度や加速度の情報には、台車や車体の振動によって車輪回転成分以外の振動成分が含まれ、空転誤検知の要因となるので、通常、これらの情報には平滑化処理が施されます。ここで、空転発生直後の加速度は徐々に大きくなり、空転収束時の加速度は急激に小さくなる傾向があるため、空転発生時と空転収束時では加速度の変化率に数倍の開きがあります。
そこで、変化率の差に着目し、平滑化処理の時定数の大きなものを空転検知(トルク引き下げ開始)用に、小さいものを空転収束検知(トルク引き下げ停止)用に分けて使用することを提案しました(図2)。これにより、空転収束の検知の遅れによる余分なトルクの引き下げがなくなり、けん引力向上が期待できます。
提案した空転検知方式の有効性を確認するため、新製入換機関車 HD300 を用いて散水空転試験を実施しました。試験の結果、けん引力は0〜10km/hの速度域において、平均 5% 以上向上することを確認しました(図3)。本方法は本線用電気機関車や電車へも適用できます。
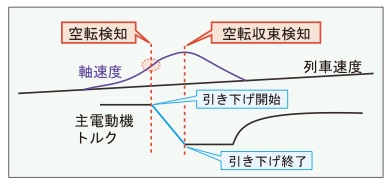
図1 空転検知とトルク引き下げ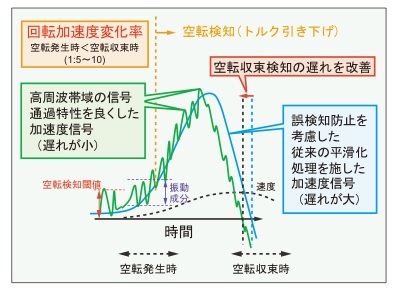
図2 空転加速度の平滑化処理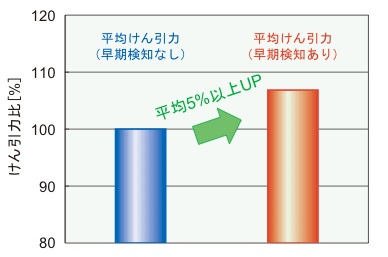
図3 現車試験結果
- 研究・開発 > 主要な研究開発成果(2013年度) > IV 利便性の向上
-

RTRIホームページ - Copyright(c) 2014 Railway Technical Research Institute