電力ニュース
2018年4月号
集電系HILSシステムの開発状況
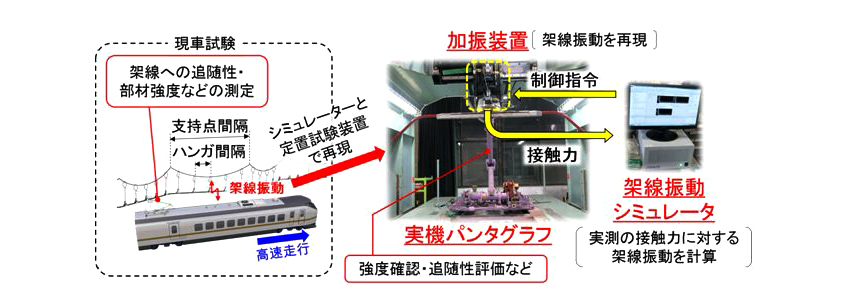
パンタグラフの開発において、現車試験を実施する前に各構成部材の強度や振動する架線への追随性を試験装置で確認しておく必要があります。しかし、従来の定置試験装置では、パンタグラフが走行しながら架線を揺らすことにより発生する架線の振動を十分に考慮できなかったため、現車試験において定置試験で確認されたパンタグラフの性能が発揮されないことがあり、この場合には、パンタグラフの再調整と試験を繰り返す必要がありました。
そこで、定置試験装置でパンタグラフと架線との相互作用を考慮した模擬走行試験を実施可能な集電系HILS(Hardware In the Loop Simulation)システム(図1)を開発しました。従来のシステムでは、架線を伝播する波動の影響を考慮することができませんでしたが、本システムでは、架線振動シミュレータ内の架線モデルの改良により、波動伝播の影響を考慮してパンタグラフの走行により生じる架線の振動をリアルタイムで計算し、加振装置を制御することにより、架線の下を走行している状況を模擬できます。
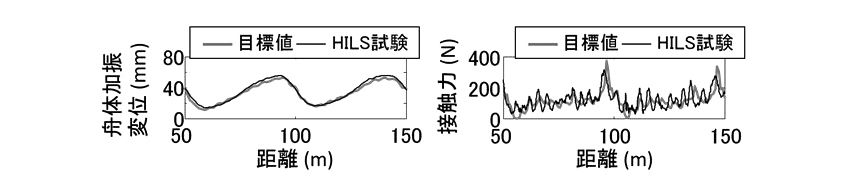
300km/h走行を模擬した本システムによる試験結果と目標値(架線・パンタグラフ系シミュレーションにより設定)を比較すると、両者はよく一致していることから、パンタグラフの模擬走行試験が実施可能であることを確認しました(図2)。
本システムは、架線の上下運動のみを模擬していますが、今後は、架線の左右偏位およびパンタグラフの走行に伴う架線とのしゅう動を模擬することが可能な試験装置への実装を目指し、より実走行状態に近い集電系HILSシステムへと機能向上をしていく予定です。
本システムにより、現車試験との乖離がより小さい定置試験が実施可能となるため、パンタグラフの開発期間の短縮が期待できます。
(記事:集電力学 山下 義隆)
防護管付き2線条の自励的振動
電車線や送電線などの線条において、強風により自励的振動が発生することがあり、支持点破壊や地絡、線間短絡などの事故を引き起こす一因となっています。風による自励的振動として、非円形断面を持つ線条のギャロッピング振動や、近接2線条の流力振動が知られています。前者は、断面形状の非対称性から、線条に対し空気力が負の減衰として作用して発散振動を起こすものです。後者は、上流側線条で剥離した流れが下流側線条に作用して振動を起こすものです。これらが連成して自励的振動を起こす可能性もあり、非円形断面を持つ近接2線条は自励的振動を生じやすいと考えられます。
この観点から電車線設備を考えると、例えばツインシンプル架線のちょう架線に工事等で防護管を装着した場合、防護管の影響によるギャロッピングや、2線条の近接設置による自励的振動が生じる可能性があります。そのため、防護管付きツインシンプル架線を想定して、防護管付き単線および防護管付き2線条の自励的振動特性の有無について、実験的に検証を行いました。
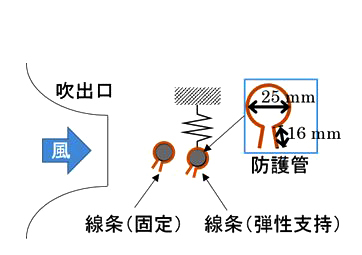
図1に本試験の概要図を示します。本試験では、風洞計測部に弾性支持した線条を設置し、一定風速(30m/s)の送風により弾性支持した線条に自励的振動が発生するかを検証しました。また、上流側の固定線条の有無や風向(迎角変化)による振動発生への影響を調査しました。風向条件を変更する際、風洞の吹出口は固定されていますので、防護管のヒレの向きおよび下流側線条の設置高さを変更することで、線条から見た相対的な風向を変化させました。線条は、円柱(外径25mm)に防護管(内径25mm、ヒレ長さ16mm)を取り付けたものを用いました。2線条の線間は100mmとしました。
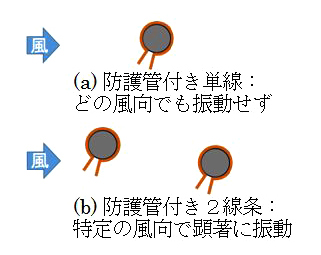
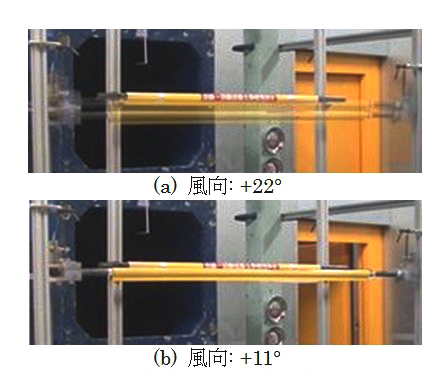
図2に検証結果の概要を示します。防護管付き単線での試験では、いずれの風向でも顕著な自励的振動は発生しませんでした。一方、防護管付き2線条では、特定の風向(吹き上げ22°近辺および吹き降ろし17°)で振幅数十mm、振動数2.5Hz程度の顕著な自励的振動の発生が確認されました。参考として、図3に顕著な振動が発生した場合(a)と発生しなかった場合(b)の様子を示します。顕著な振動が発生した風向条件では、風速20m/s程度で振動が自励的に発生し、一度発生すると、風速を10m/s程度に減速しても振動状態が持続しました。いずれの風速でも、実験系の固有振動数と想定される2.5Hz程度で振動したことから、観測された振動は渦励振ではなくギャロッピングであると考えられます。
以上の結果より、今回用いた防護管(内径25mm、ヒレ長さ16mm)において、単体ではギャロッピングが発生しなくても、防護管付き2線条が線間100mmと近接すると、顕著なギャロッピング振動が発生する可能性があることを確認しました。
(記事:電車線構造 中村 琢)
新たなトロリ線摩耗測定手法の基礎検討
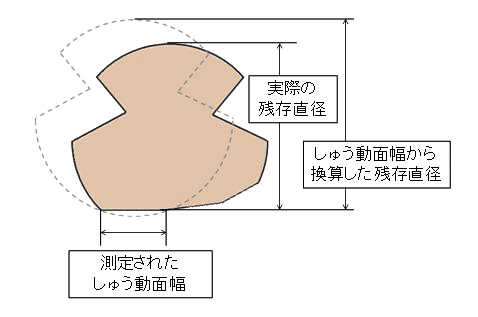
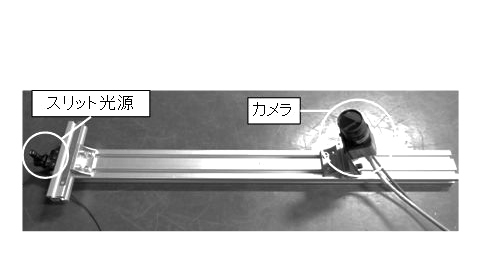
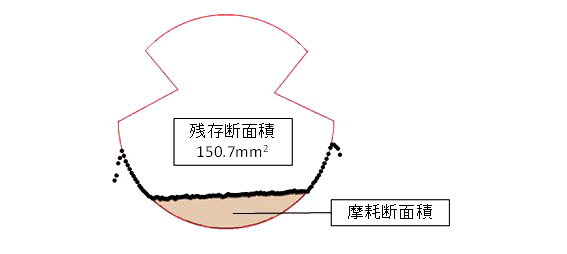
トロリ線の摩耗は残存直径で管理されていますが、現在の電気検測車では残存直径を直接測定するのではなく、トロリ線の「しゅう動面幅」を測定しています。トロリ線の断面を見たときしゅう動面が車両と平行かつ一直線であれば、しゅう動面幅から残存直径に正しく換算することが可能です。しかし、わたり線などでみられるような偏摩耗によりしゅう動面が一直線でない場合(図1)には、測定されたしゅう動面幅から残存直径に正しく換算できません。また、しゅう動面が一直線であっても、しゅう動面の近傍にすり傷などがあると、しゅう動面幅を正しく測定することができず、残存直径の評価が不正確となる場合があります。 そこで、新たなトロリ線摩耗測定手法として、光切断法を用いた残存断面積測定手法の開発を進めています。測定にはスリット光源とカメラを用いています(図2)。光切断法とは、測定対象にスリット光等を照射してできる反射光の像(光切断像と呼びます。)をカメラで撮影し、物体の形状を測定する非接触の形状測定手法です。この手法を応用することで、トロリ線下半分の形状を測定することができます。光切断法によって得たトロリ線下半分の形状と新品のトロリ線下半分の形状を比較すれば、2つの形状の差分から摩耗によって減少した部分の断面積がわかります(図3)。新品のトロリ線断面積から、摩耗した部分の断面積を差し引けば、現在のトロリ線の断面積が求められます。
現在のところ、屋内もしくは屋外・夜間であれば実際の残存直径との誤差をおおむね±0.1mm以内の精度で測定可能です。一方、屋外・日中では太陽光が測定に乱れを及ぼすことによる測定誤差が無視できない程度含まれてしまいます。そのため、太陽光の影響を小さくすることが課題です。この課題を克服するため、複数カメラの連携による冗長性の確保や、外乱に影響されにくい摩耗測定アルゴリズムの研究を進めていく予定です。
(記事:集電管理 薄 広歩)
可変リアクトルを用いた整流器出力電圧制御技術の開発
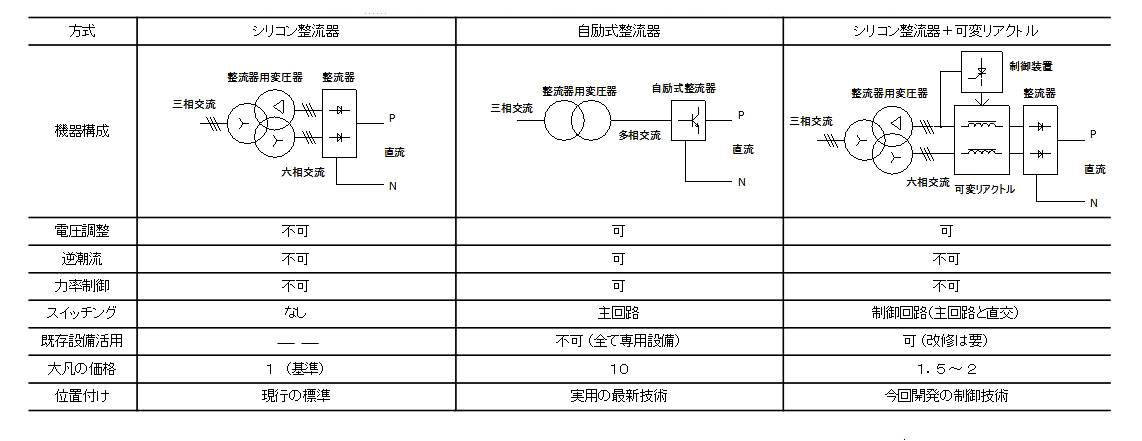
直流き電システムでは、き電電圧を適切に制御することで回生電力の向上と、それによる省エネ効果が期待できます。また、他にも長大き電区間の電圧降下補償など、き電電圧制御が必要な場合がありますが、最も一般的に用いられているシリコン整流器(表1左側)には電圧制御機能がありません。日本において実用化された直流き電システムの電圧制御技術には、サイリスタ整流器(直流き電電圧補償装置DCVRを含む)や最新技術である自励式整流器(PWM制御整流器、表1中央)等があります。
自励式整流器には電圧制御機能に加え、逆潮流(回生運転)、力率制御(波形制御を含む)など多彩な機能が実装されていますが、価格がシリコン整流器の10倍程度と高価です。そこで機能を電圧制御に限定することで、自励式整流器の1/5程度の価格で実現可能な新しいき電電圧制御方式を開発しました(表1右側)。この新しい方式は、シリコン整流器を構成する整流器用変圧器と整流器の間に、可変リアクトルとその制御装置を挿入した構成となっています。可変リアクトルの電圧降下(インダクタンス)を制御装置で調整することで、整流器の出力電圧が制御可能です。
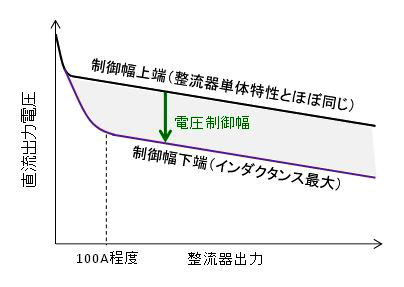
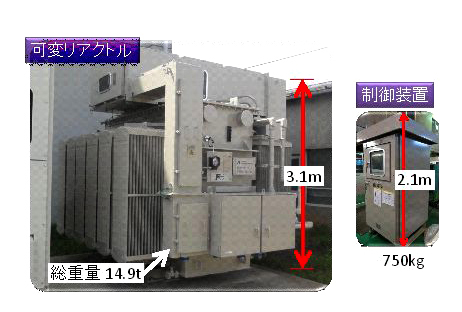
新しい方式の整流器では、直流出力電流と出力電圧は、図1のように100A程度(設計で調整可能)以上の負荷領域で一定の電圧制御幅(設計で調整可能)を持つ特性となり、この範囲内の任意電圧を出力することができます。定格電圧1500V(直流出力)、電圧制御幅400V、定格電流500A(直流出力)の試作器(図2)を製作し、所内での試験電車の走行試験を行ったところ、所期の電圧制御性能が得られることを確認しました。
(記事:き電 森田 岳)