施設研究ニュース
2023年12月号
分岐器高速通過時における軌道変位が分岐器部材に及ぼす影響の一検討
1.はじめに
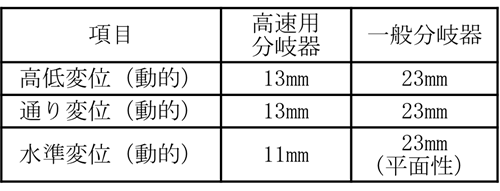
旧国鉄では,分岐器基準線側を120km/h以上の速度で高速通過する分岐器(以下,「高速用分岐器」という)において,ポイント部の継目やクロッシング部の継目等で著大横圧が確認されました.これを受け,高速用分岐器では,著大横圧による軌道部材や信号部材の損傷を防ぐため,表1に示す一般の分岐器よりも厳しい軌道変位整備基準値が,分岐器全体で一律に設定されました1).現在も一部の鉄道事業者で本値が適用されていますが,この値は旧国鉄において暫定的に設定されたものであり,分岐器高速通過時における軌道変位が分岐器部材に及ぼす影響について十分な検証がなされているものではありません.そこで本研究では,その一環として,ポイント部の継目を対象に,分岐器高速通過時における軌道変位が分岐器部材の1つであるレール締結装置の発生応力に及ぼす影響について,車両走行シミュレーションを用いた評価を行ったので以下に報告します.
2. 解析モデル
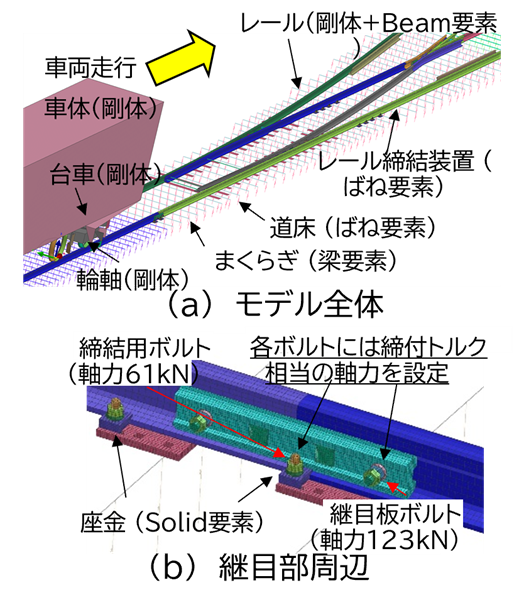
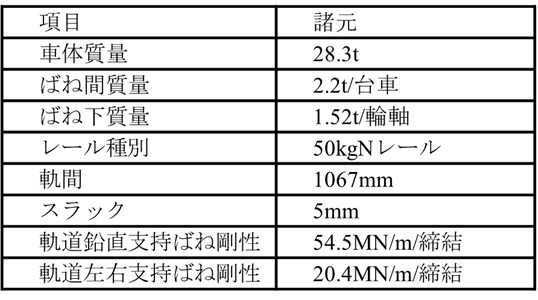
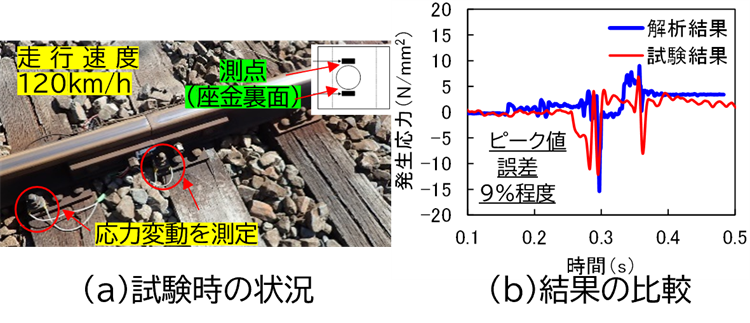
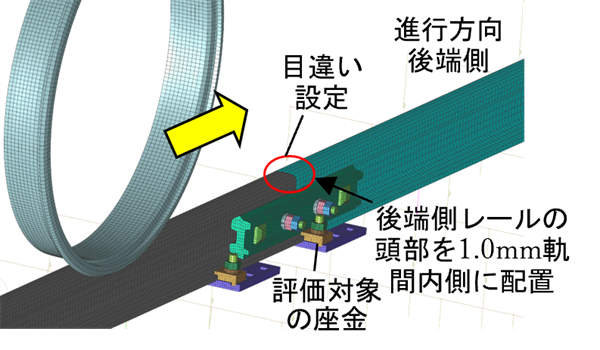
検討に用いる走行解析モデルを図1に,主な解析諸元を表2に示します.車両モデルは,1個の車体,2個の台車,4個の輪軸を剛体でモデル化し,各質点をバネ・ダンパ要素で結合した1車両です.軌道モデルは,10番片開き分岐器(弾性ポイント)を対象とし,基本となるレール・まくらぎ・下部構造を梁要素とばね要素でモデル化しています.また,評価対象は,ポイント部前端継目のレール締結装置の構成部材である座金(以下,「座金」という)とし,応力を算定できるようソリッド要素でモデル化しました.また,座金の締結用ボルトおよび継目板ボルトは梁要素とその形状を模擬する剛体要素でモデル化し,各ボルトには締結トルクで発生する軸力を設定しています.なお,本解析モデルの妥当性については,分岐器前端継目部における現地試験を実施し,現地の継目部状態,レール締結間隔,軌道変位等を模擬した解析モデルによる解析結果と試験結果で,座金に発生する応力のピーク値が概ね一致することを確認しました(図2).
3. 検討結果
2章で示した解析モデルで,軌道変位をパラメータとしたパラメータスタディを実施しました.設定する軌道変位は,高速用分岐器において厳しく設定されている高低,通り,水準変位とし,形状はコサイン波1波,波長は10m,振幅は5mm刻みで5~25mmを設定しました.軌道変位の設定位置は,事前に試計算を行い,継目部付近で最大の輪重・横圧が生じる箇所としました.また,走行速度は120km/hとしました.なお,旧国鉄において高速用分岐器では,継目部のレール左右方向の目違い量の基準値として1.0mmが設定されていたことから,本モデルでは,継目部の進行方向後端側レール頭部を1.0mm軌間内側に変位させることで目違いを設定しました(図3).本解析では,軌間内側の継目部直下の座金に発生する最大応力(図2(a)の測定位置)を確認しました.座金の発生応力は,鉄道構造物等設計標準(軌道構造)にて示される疲労限度115N/mm2 2)を疲労破壊に関する限界値(以下、「限界値」という)として比較しました.
4.解析結果及び考察
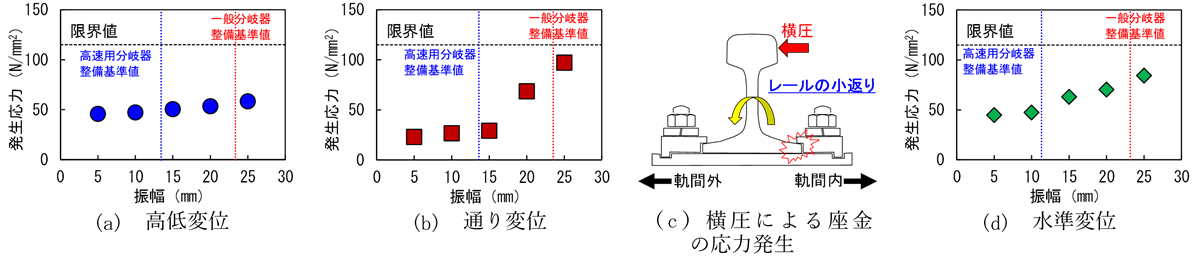
解析結果を図4に示します.高低変位に関する解析結果(図4(a))を確認すると,振幅の増加に伴い,発生応力の増加傾向はみられるものの,その増加量は小さく,全ての振幅において限界値を下回っていました.次に,通り変位に関する解析結果(図4(b))を確認すると,振幅の増加に伴い,発生応力も増加し,特に振幅20mm以降は大きく増加する傾向が確認されました.これは,通り変位の影響によって生じる横圧が継目部に作用し,その力によりレールが小返ることで座金に大きな応力が生じたものと考えられます(図4(c)).ただし,全ての振幅において発生応力は限界値を下回っていました.最後に,水準変位に関する解析結果(図4(d))を確認すると,振幅の増加に伴い,発生応力が増加する傾向が確認されましたが,その他のケースと同様に,全ての振幅において限界値を下回っていました.
解析の結果,現行の高速用分岐器の軌道変位整備基準値下において,座金の発生応力は限界値に対して十分に余裕があることがわかりました.また,一般分岐器の整備基準値程度まで軌道変位を許容した場合においても発生応力は限界値を下回っていました.このことから,座金の発生応力という観点においては,一般分岐器と同程度まで整備基準値を緩和できる可能性があることを確認しました.
5.まとめ
本研究では,車両走行シミュレーションを用いて,高速用分岐器における軌道変位が継目部の座金の発生応力に及ぼす影響を評価しました.今後は,軌道変位が信号部材に及ぼす影響についても評価を行い,高速用分岐器における適切な整備基準値の設定に向けた取り組みを深度化する予定です.
参考文献
1) 日本鉄道技術協会:高速化のための軌道管理手法の研究報告書,pp.188-197,1985
2) 鉄道総合技術研究所編:鉄道構造物等設計標準・同解説(軌道構造),p195,2012
執筆者:軌道技術研究部 軌道構造研究室 塩田勝利
狭あい箇所に設置可能な制震機能を有する落橋防止装置
1.はじめに
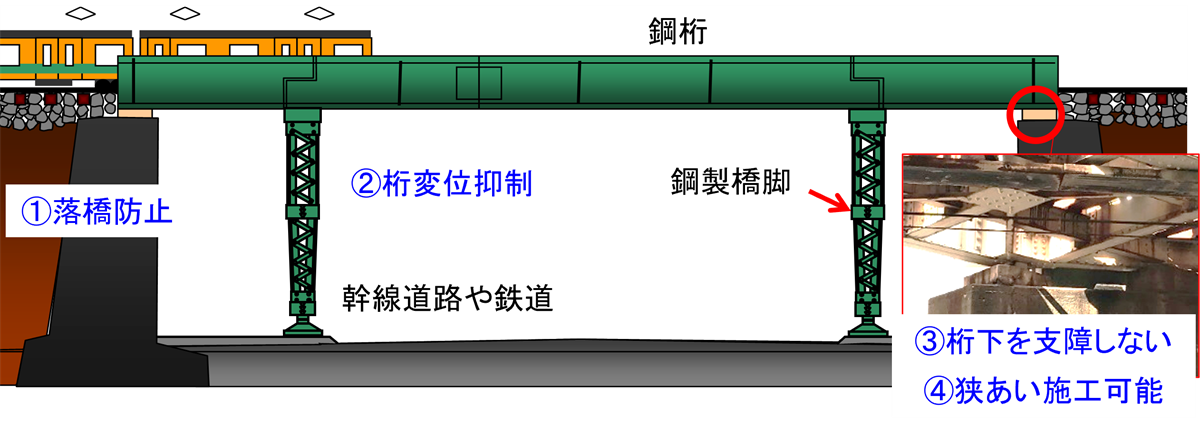
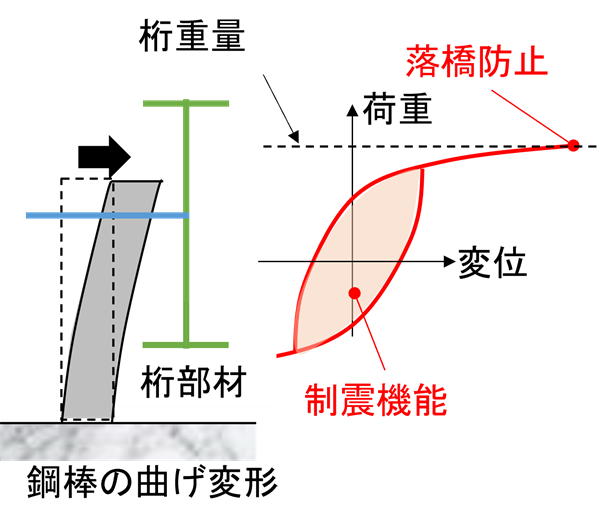
都市部の幹線道路や鉄道をまたぐ橋りょうは,地震時に損傷した場合の周辺環境への影響が大きいため,落橋防止および桁変位の抑制が求められています(図1①,②).一方,これらの対策を行うにあたっては,桁下を支障できない,支承部が狭あい,など厳しい施工条件が要求されることもあります(図1③,④).そこで,施工性に配慮した制震機能を有する落橋防止装置を開発しました1).
2.開発装置の概要
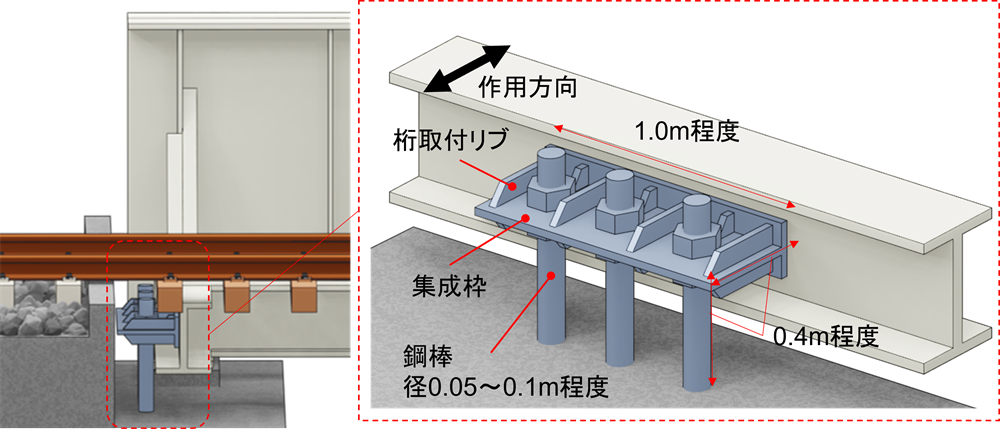
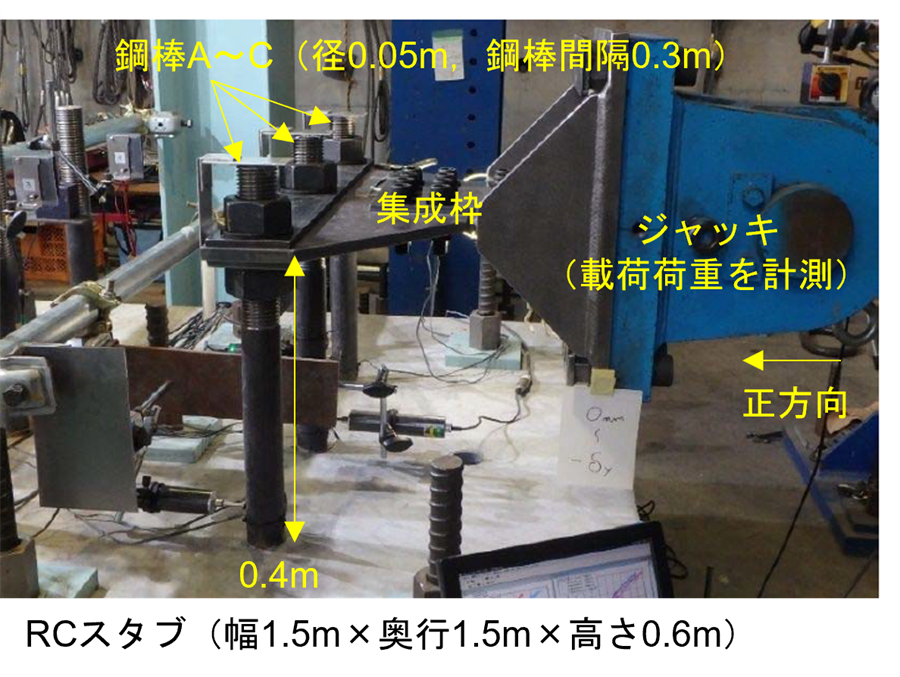
開発装置のイメージを図2に示します.開発装置は,径0.05~0.1m程度の複数の鋼棒を集成枠で一体化させ,桁に取付ける構造であり,1.0m×0.4m程度のスペースで設置可能で,狭あいな桁支承部に施工可能です.また,開発装置の非線形特性を図3に示します.鋼棒が変形する際のエネルギー吸収による制震効果で地震時の桁の応答変位を低減可能です.また,鋼棒の高い延性により,万が一過大な変位が生じた場合も桁の自重を保持(落橋防止)可能です.
3.開発装置の非線形特性の把握と制震効果の検証
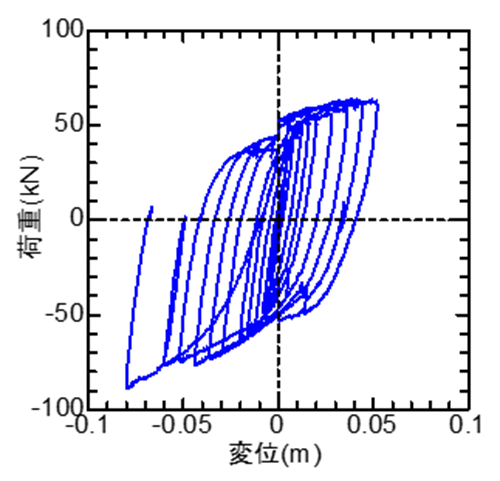
開発装置の非線形特性を把握することを目的に,径0.05mの鋼棒3本をRCスタブに埋め込み,正負交番載荷試験を実施しました(図4).実験で得られた荷重—変位関係を図5に示します.鋼棒の変形により,双曲線型の履歴曲線を描くことがわかります.また,本実験では鋼棒に目立った損傷は確認されておらず,本装置が高い延性を有していることも確認しています.
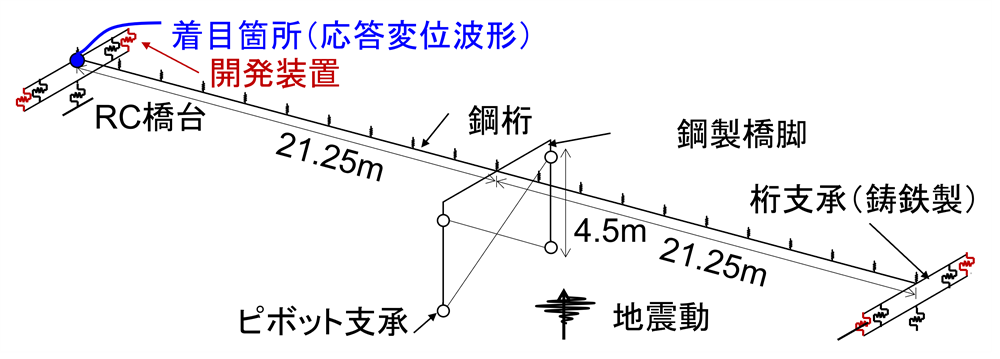
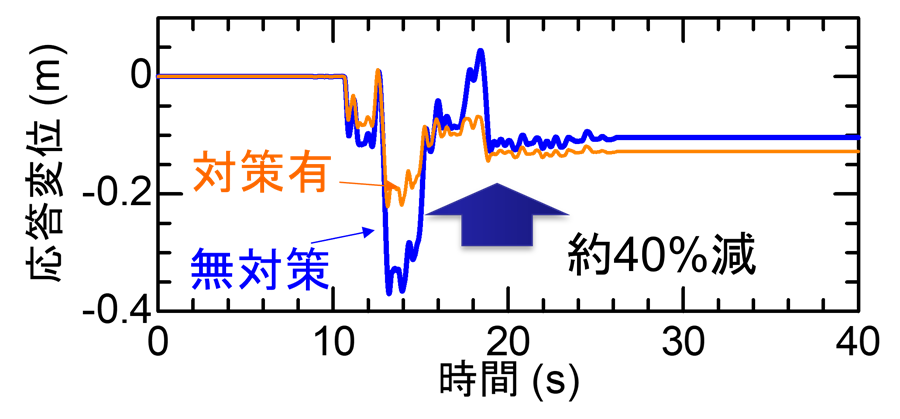
次に開発装置の制震効果の検証として,図6に示すロッキング橋脚を有する鋼橋りょうの骨組みモデル(複線3主桁,開床式2径間下路プレートガーダー橋)に装置を設置した場合の地震時挙動を評価しました.ここで,入力地震動は「鉄道構造物等設計標準・同解説 耐震設計」2)のL2地震動スペクトルII(G3地盤)としました.また,開発装置の非線形特性は図5の実験結果にフィッティングするように設定しました.端部の桁支承直上における桁の応答変位を図7に示しますが,装置の制震効果により応答変位の最大値を40%程度低減できることがわかります.
4.開発装置の設計フロー
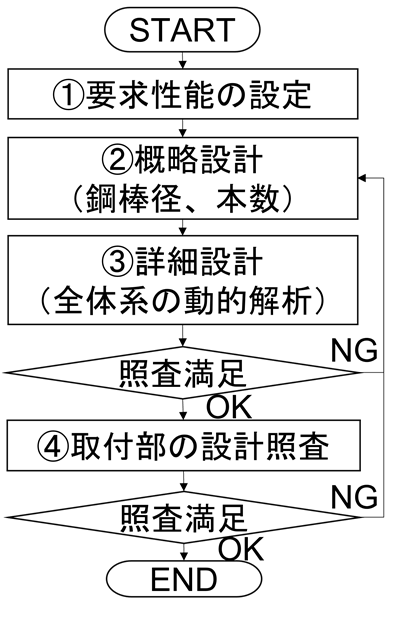
上述した性能を有する開発装置の設計フローを整備しました(図8).まず,「①要求性能の設定」として,対象とする橋りょうの応答変位の制限値や設計地震動を設定します.応答変位の制限値については,例えば支承から逸脱しない条件などから設定できます.設計地震動としては,標準L2地震動を基本とし,必要に応じて対象地点ごとのシナリオ地震等を含めることが考えられます.次に,「②概略設計」として,対象橋りょうの桁重量および地盤種別,目標変位を設定し,別途整備している設計線図3)を用いて,目標変位以内となる鋼棒本数,径を概略設計します.続いて,「③詳細設計」として,図6のような骨組み解析モデルを用いた動的解析によって,装置以外の橋台く体等の部位も含めた照査を行います.最後に,「④取付部の設計照査」で,橋台や桁への取り付け部の設計を行います.桁への取り付けについては,落橋防止機能を発揮する前提として取り付け部に十分な強度を確保します.
5.おわりに
制震機能を有する落橋防止装置について紹介しました.本装置は西日本旅客鉄道会社の橋りょうで実用化されています4).今後も引き続き,実用展開を図る予定です.
参考文献
1) 土井達也,豊岡亮洋,斉藤雅充,和田一範,名波健吾,福本守:狭隘な箇所に設置可能な落橋防止機能兼用型制震装置の開発,土木学会論文集,Vol.79,No.13,22-13003,2023.
2) 鉄道総合技術研究所編:鉄道構造物等設計標準・同解説 耐震設計,丸善出版,2012.
3) 和田一範,櫛谷拓馬,豊岡亮洋:狭隘箇所に設置可能な落橋防止機能兼用型制震装置の概略設計法の提案,土木学会論文集A1,Vol.78,No.4,pp.I_152-I_161,2022
4) 鉄道総合技術研究所:大規模地震対策として制震機能をもつ落橋防止装置が実用化されました,鉄道総合技術研究所 ニュースリリース,2023(https://www.rtri.or.jp/press/hgudar000000075z-att/hgudar000000077s.pdf,2023年10月23日閲覧)
執筆者:鉄道地震工学研究センター 地震応答制御研究室 和田一範
担当者:鉄道地震工学研究センター 地震応答制御研究室 名波健吾,地震動力学研究室 土井達也
深層学習を用いた気象擾乱の自動判別手法
1.はじめに
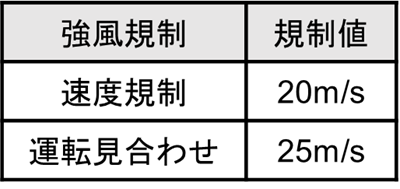
鉄道沿線には強風を監視するための風速計が設置されており,これらの風速計で観測された風速値(瞬間風速値)に基づいて,強風下を走行中の列車に対して速度規制や運転見合わせといった強風時の運転規制(以降,強風規制と記す)の発令と解除を行っています.例えばJR西日本では,原則として規制値(表1)を超える風速が観測されたことで強風規制を開始し,風速が規制値を下回ってからその状態が15分以上継続したことを条件に解除するという運用がなされています1).短時間の強風規制であれば安定輸送への影響は少ないですが,長時間にわたって断続的に強風が吹く場合には,強風規制の開始と解除が繰り返されたり,運転再開見込み時刻が当初の想定から大きく外れたりすることがあります.このため,運転再開見込み時刻の精度向上など,強風規制の品質向上が課題となっています.
そこで,強風発生時の気象擾乱(例えば、台風や低気圧の通過など)に応じて強風の継続時間や強風の終息傾向等に違いがあることに着目した瞬間風速の逐次予測を行うことで,運転再開時刻の設定を支援するシステムの開発に取り組んでおります.ここでは,本システムをオンタイムで駆動させるために必要となる気象擾乱自動判別モデルについて紹介します.
2.気象擾乱判別モデルの概要
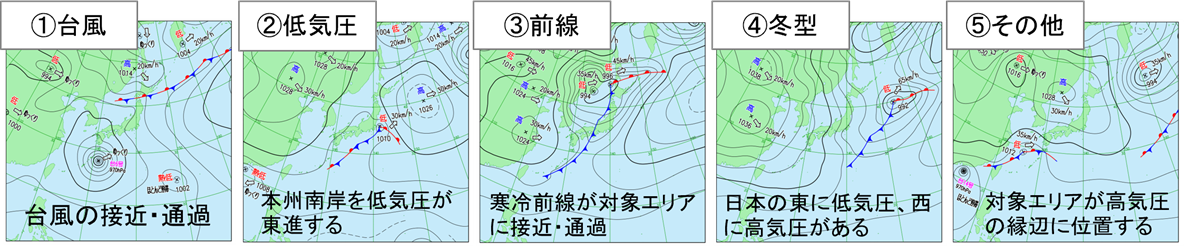
近年,気象学の分野においても,ドップラーレーダーの観測画像から突風を探知する技術の開発2)や衛星画像からの台風勢力の推定するAIの開発など,深層学習を用いた研究開発が飛躍的に進められています.本研究でも深層学習を活用し,例えば気象庁が一般に公開している地上天気図3)を入力データとして,対象エリアにおいて強風をもたらすと考えられる気象擾乱を①台風(熱帯低気圧を含む)、②低気圧、③前線、④西高東低の気圧配置(以降,冬型と記する)、⑤その他(例えば高気圧の縁辺部:対象エリアが高気圧の縁辺部に位置することで気圧経度が大きくなり強風が吹く)の5クラス(図1)に判別するモデルの作成を行いました.
3.気象擾乱判別モデルの構造
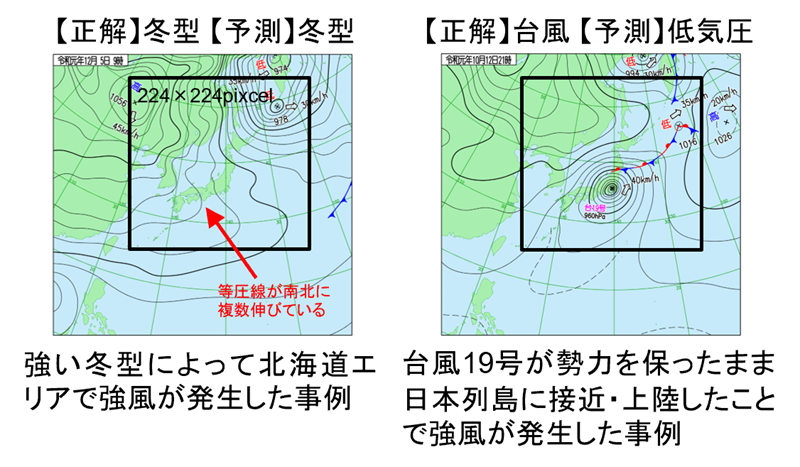
代表的な画像認識手法であるCNN(Convolution neural Network)を元としたEfficientNet-B04)に,強風発生時の地上天気図を与えて学習させ,その出力として気象擾乱を上記の5クラスに判別します.ここで,最適化アルゴリズムと損失関数にはそれぞれAdamとCross Entropy Errorを与え,バッチサイズ(学習データをいくつかに分割したときの各分割内のデータ数)を256,エポック数(学習を繰り返す回数)を100としました.学習データには,気象庁アメダス(ただし,離島や標高150m以上の観測地点は除く)の1分値データにおいて,瞬間風速25m/s以上の強風が観測された日時に最も近い時刻に発表された地上天気図を上下左右に移動させてデータ拡張を施した上で,手作業で地上天気図から気象擾乱を判別する際に着目している日本列島周辺のエリアを224×224pixcelの大きさで抽出したもの(図2中の黒枠部分に相当)を使用しました.
4.検証結果
2017年1月1日~2019年12月31日に,北海道内に位置する気象庁アメダスにおいて瞬間風速25m/s以上の強風が観測された時刻の地上天気図(全478データ,各クラスのデータ数内訳は表2に示す)を対象に以下の精度検証を行いました.
各クラスのデータ数を考慮して5分割したうちの4/5を学習データ,残りの1/5を検証データとし,モデルが適切に学習できているかを判断するために学習経過を確認しました.その結果,検証データに対するloss(損失関数,値が小さいほど汎用性が高い)/accuracy(正答率,値が大きいほど精度が良い)はエポック数が進むにつれて指数関数的に減少/増加し,最終的にはほぼ一定の値に落ち着いていることから,過学習などが起きずに順調に学習が進んだことがわかりました.最終的なlossとaccuracyはそれぞれ0.87と0.67となり,目標としていたaccuracy>0.8には届いていないものの,深層学習を用いた気象擾乱の自動判別の見込みを得ることができました.
判別結果の詳細を見ると,冬型および低気圧は正答率が高く,特に南北方向に等圧線が複数伸びる強い冬型の事例や,前線を伴う強い低気圧が北海道付近に位置する事例等は正しく判別できていることがわかりました(図2左).一方で,等圧線がやや東西方向に傾くような弱い冬型を低気圧,学習データが相対的に少ない台風を低気圧と誤認する事例もありました(図2右).今回は使用したデータ数が少なく,またクラス間のデータ数の偏りも大きい(表2)ことから誤認が発生したと考えられます.学習データの均質化を図るとともに,モデルのパラメータや抽出エリアの再検討を行うことで判別精度向上の余地があると考えています.

5.おわりに
一般的に入手可能な地上天気図を学習データとして深層学習を用いた気象擾乱判別モデルを作成し,その検証を行いました.今後は判別精度の向上に取り組むとともに,最終的な目標である気象擾乱を考慮した運転再開判断支援システムの開発を進めていく予定です.
参考文献
1) 津原賢治: 強風の特徴からみた運転規制方法の妥当性の検証, 技術の泉, No.39, 9-10, 2018.
2) 鈴木博人,藤原忠誠,櫃間智紀,楠研一,猪上華子: ドップラーレーダーを用いた突風に対する列車運転規制方法の開発と導入,JREA,Vol.61,No.6(2018),pp.42281-42284
3) 気象庁:https://www.data.jma.go.jp/yoho/wxchart/quickmonthly.html, 2023年11月9日 閲覧
4) Mingxing Tan and Quoc V Le.: EfficientNet: Rethinking model scaling for convolutional neural networks. In Proceedings of International Conference on Machine Learning (ICML), 2019
執筆者:防災技術研究部 気象防災研究室 栗原 璃
担当者:情報通信技術研究部 画像解析研究室 長峯 望
発行者:柴田 宗典 【(公財) 鉄道総合技術研究所 施設研究ニュース編集委員会 委員長】
編集者:箕浦 慎太郎 【(公財) 鉄道総合技術研究所 鉄道力学研究部 軌道力学】