車両ニュースレター
2018年4月号
[クローズアップ]ダイナミックな研究開発の推進
1 研究開発の概要
鉄道総研では,研究開発の方針として,「安全性の向上に関するテーマの重点的な実施」,「鉄道の将来に向けた研究開発の着実な実施」,「鉄道事業者のニーズに対応する実用的な技術開発の実施」および「基礎研究の推進」を掲げるほか,平成30年度は特に「ICTの鉄道への応用」と「独創的な課題の推進」に取り組んでまいります。
平成30年度の研究開発テーマ件数は279件です。鉄道の将来に向けた研究開発では,概ね十数年先の実用化を念頭におき,実用化した場合の波及効果が大きな課題,具体的には「鉄道システムの更なる安全性の追求」,「情報ネットワークによる鉄道システムの革新」,「新幹線の速度向上」および「鉄道シミュレータの構築」の4つの大課題を,平成27年度より5年計画(現基本計画 RESEARCH2020)で進めています。平成30年度は4年目にあたりますので,最終成果の達成を見据えて計43件のテーマを着実に実施してまいります。実用的な技術開発では,鉄道事業者のニーズが高く,リソースを集中的に投入することで実用化が促進される課題計136件を実施します。鉄道の基礎研究では,鉄道固有の現象の解明,新たな解析・実験・評価方法の構築,数値シミュレーションの精度向上・高速化および新材料の鉄道への適用などの課題計100件に取り組みます。さらに,平成30年度は,「ICT の鉄道への応用」および「独創的な課題の推進」を重点的に実施しますが,その概要を以下に示します。
2 ICTの鉄道への応用
画像解析や人工知能(AI)等のICTの鉄道技術への応用を推進し,列車運行の安全性向上や自動化,メンテナンスの自動化などに資するテーマ45件に取り組みます。主なテーマは図1に示すとおりで,自動運転に不可欠な線路内監視・列車防御機能や,鉄道用情報ネットワークにおけるセキュリティ確保,画像等を用いた保守の効率化などに関する研究開発を分野横断的に実施します。
3 独創的な課題の推進
テーマ遂行の難易度が高く,必ずしも目標通り達成できるかは分からないが,目標達成時に得られる波及効果等が高いテーマをチャレンジングテーマとして設定し,リソースを重点的に投入して取り組んでいます。具体的には平成30年度は図2に示す5件のテーマを計画しています。電車の駆動システムの大幅な小型軽量化を図るディスク形モーターや,岩盤斜面の風化による落石の予測,内陸活断層による地震の早期検知,軌道回路に代わるレール破断検知システムなど,現在の鉄道システムの革新,安全性の更なる向上に資する課題に取り組みます。
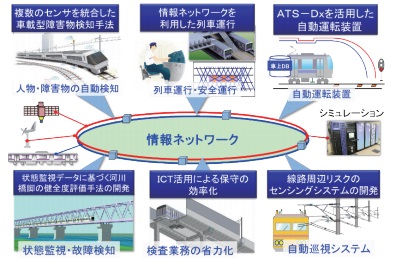 図1 ICTの鉄道応用に関わる主なテーマ
図1 ICTの鉄道応用に関わる主なテーマ
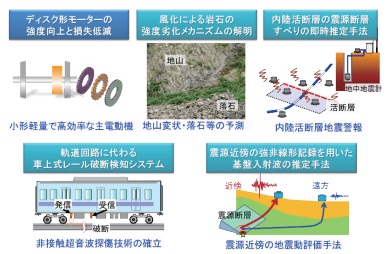 図 2 独創的な課題(チャレンジングテーマ)
図 2 独創的な課題(チャレンジングテーマ)
4 ダイナミックな研究開発の推進
鉄道事業者のニーズが多様化し,科学技術が目覚しく発展する中で,巨大地震や豪雨,強風等の自然災害に対する強靭化,脱線対策,ヒューマンエラー防止など更なる安全性向上を図るとともに,保守コスト化を低減し,省エネルギーで利便性の高い鉄道システムを構築するために,ICTやシミュレーション技術を積極的に活用し,適時,的確にリソースの重点化を図り,変化を先取りした技術を創造するダイナミックな研究開発を推進してまいります。皆様からの忌憚の無いご意見を賜れば幸いです。
理事 芦谷 公稔
【研究&開発】構内試験を活用した走行中の台車振動予測
1 はじめに
台車に発生する振動は,締結ボルトの緩みや,最悪の場合には部品の疲労破壊につながる恐れもあり,このような事象を未然に防ぐためにも,走行中の振動状態を把握することは重要な課題です。しかしながら,営業線を使用した走行時の振動測定は容易には実施できないため,できるだけ簡便に振動を把握できる手法が望まれます。このような背景から,鉄道総研では,車両基地や工場などの構内(以下,単に構内と呼びます)における振動測定データを活用して,走行中の台車評価点の加速度を数値計算により予測する手法の開発を進めています。
2 台車振動予測手法の概要
走行中の台車に発生する振動は,主に軌道変位(構造物やレールの凹凸),機器の回転によるものなどが考えられますが,ここでは前者を対象とし,以下ではこれを「入力」と呼びます。軌道からの加振入力が大きければ,台車全体としての振動も大きくなると考えられます。ただし,同じ入力でも,台車内の場所によって入力に対する反応のしやすさが異なるため,振動が大きい部位と小さい部位が生じ,この反応のしやすさを表す指標を「伝達関数」と呼びます。以上の関係をまとめ,台車内のある評価点に着目したとき,以下の関係があるとみなします。
「評価点の振動」=「入力」×「伝達関数」
この関係を模式的に表したものを図1に示します。実際の台車では,1 台車につき車輪が 4 箇所でレールと接しているため,評価点の振動は,それぞれの位置における入力と伝達関数の積を足し合わせたものになりす。
上記の関係式の右辺のうち,入力だけを営業線上で測定し,伝達関数を構内で取得できれば,営業線上での振動測定を簡略化できるメリットが得られるほか,試験が実施できる機会が増えることも期待できます。なお,入力はもともと軌道変位による車輪からの加振力ですが,以下では実測のしやすさを考慮して,これと関連が高い「軸箱加速度」を入力と考えます。
一方,伝達関数については構内において何らかの方法で輪軸位置に振動を与え,軸箱加速度(入力)と台車枠評価点加速度(出力)を計測すれば,
「伝達関数」=「台車評価点加速度」/「軸箱加速度」
として求めることができます。具体的な振動の与え方としては,軸箱位置をハンマーで打撃する方法(打撃試験)と,構内を低速で走行する方法(構内走行)を検討しました。
以上の手順をあらためて整理すると,以下のようになり,そのイメージを図2に示します(ステップ①と②の実施順序は前後しても構いません)。なお,振動は周波数に対する大きさとして評価されることが多いため,図中のグラフの横軸は周波数,縦軸は振動または伝達関数の大きさを表しています。
【ステップ①】
評価したい区間(営業線)の軸箱加速度を取得します。過去に同区間で取得したデータがあれば,それを活用できます。
【ステップ②】
構内試験により軸箱・台車評価点加速度間の伝達関数を求めます。
【ステップ③】
②で推定した伝達関数への入力として①の軸箱加速度を与え,両者を掛けあわせることで評価点加速度を予測します。
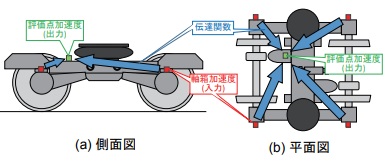 図1 各軸箱から評価点までの振動伝達イメージ
図1 各軸箱から評価点までの振動伝達イメージ
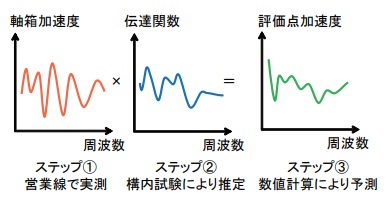 図 2 台車評価点振動予測手法の手順イメージ
図 2 台車評価点振動予測手法の手順イメージ
3 予測結果と精度検証
今回の検証では,在来線特急形電車と,近郊形電車の2車種の台車を対象としました。このうち,近郊形電車の供試台車の外観と,振動測定用のセンサの設置状況を図3に示します(なお,特急形電車では評価点を左右動ダンパ受にしました)。
まず,特急形電車を対象に,打撃試験で得た伝達関数と営業線で実測した軸箱上下加速度から,当該区間走行時の評価点(左右動ダンパ受)の振動を予測し,実測と比較した結果を図4(a)の青線に示します。グラフの縦軸は振動の大きさの指標であるパワースペクトル密度(PSD)です。これによると,ごく低い周波数を除いて,予測 PSDが実測とよく一致しており,良好な精度で振動が予測できることが確認できました。
一方,近郊形電車を対象に,同様の手法で評価点(ブレーキテコ受)における PSDを予測したところ,図4(b)青線のように,実測とのかい離が大きくなりました。これは,打撃試験では加振力が小さいことによるほか,考慮した軸箱上下加速度以外にも,走行時には左右,前後加速度も台車振動に影響を与える場合があり,車種や測定点によっては,打撃時と走行時の輪軸の振動状態が大きく異なることが原因と考えられます。
そこで,次に構内走行中に軸箱と評価点の加速度を測定し,伝達関数を推定することを試みました。また,入力には軸箱上下加速度のほか,左右,前後加速度も考慮することにしました。この条件で得られた伝達関数をもとにPSDを予測した結果を図4(a)および(b)の赤線に示します。この条件では,両車種とも,良好な予測 PSDが得られていることがわかります。
伝達関数の推定に打撃試験および構内走行試験のいずれを用いるか,入力として軸箱加速度の上下成分のみを用いるか,左右・上下成分も合わせて用いるかについては,振動測定試験実施上の制約や,振動予測における計算時間(コスト)などを考慮する必要がありますが,これらの条件が自由に設定できる場合は,構内走行試験で,3方向の軸箱加速度を取得して評価に用いることで,精度の向上が期待できることがわかりました。
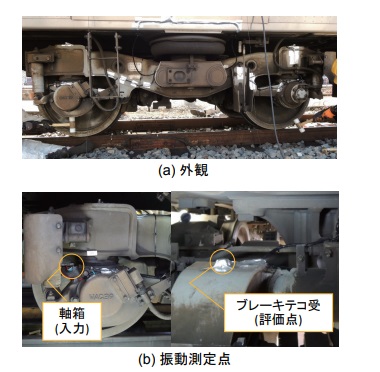 図 3 供試台車 ( 近郊形電車 )
図 3 供試台車 ( 近郊形電車 )
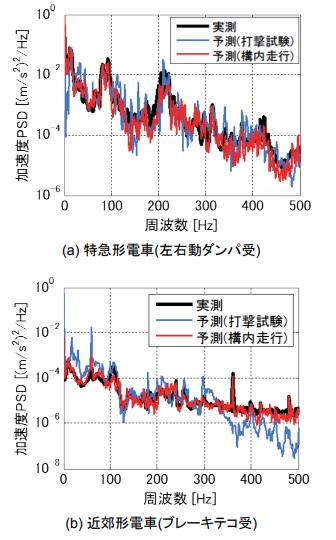 図 4 加速度PSD予測結果
図 4 加速度PSD予測結果
4 まとめ
今回提案した手法により,軸箱加速度データを一度取得しておけば,構内での試験を実施して伝達関数を推定することで,営業線走行条件における台車評価点の振動状態をある程度予測することが可能となります。したがって,車両を他線区へ転属させる場合や,走行速度を向上する場合,営業線での取得が難しい評価点での振動状態を把握するといった場面での活用が期待できると考えています。なお,入力として用いる軸箱加速度の状態や,車種(台車の構造)によっては,現時点で予測精度が十分でない場合もあるため,今後も引き続き精度向上に向けた取り組みを進めていきます。
最後に,振動測定を実施するにあたってご協力いただいたJR西日本,JR四国の関係各位に深く感謝いたします。
車両構造技術研究部 車両振動 主任研究員(上級)瀧上 唯夫
【研究&開発】衝突事故時のシート着座乗客の傷害評価
1 はじめに
鉄道車両が大型自動車等と衝突した場合,客室内では衝撃加速度によって乗客が進行方向に投げ出され,内装品と衝突して負傷する可能性があります。この時の乗客の挙動や負傷する箇所,負傷の程度を検討することは,乗客の安全性向上の観点から重要です。今回,回転リクライニングシートに着座した乗客が前席の背面に衝突するケースを検証対象として,スレッド試験を実施しました。スレッド試験とは,人体ダミー人形とシートをスレッド(土台)上に設置し,スレッドに衝撃加速度を負荷することで衝撃挙動を評価する試験です。スレッド試験により,ダミー人形の傷害値が比較的大きくなる部位を明確にし,その原因を考察しました。さらに,より安全なシートを設計するための方向性を検討しました1)ので,その結果について報告します。
2 着座した乗客を想定したスレッド試験の方法と傷害度の評価方法
標準的な在来線特急車用回転リクライニングシート(以後,シートと呼ぶ)と乗客を模擬した自動車の前面衝突試験用人体ダミー人形(以後,ダミー人形と呼ぶ)を用いて,表1に示す4条件でスレッド試験を実施しました。入力加速度波形は過去の踏切重大事故の統計調査結果から22トンの大型トレーラの側面に速度15m/sで列車が衝突する解析を実施して得られた客室内の衝撃加速度波形を基に,最大7Gを目標とする三角波形としました。この波形ではダミー人形の各傷害値が基準値に対して低かったため,より厳しい最大14Gを目標とする三角波形を条件に加えています(以後,それぞれ7G波形、14G波形と呼ぶ)。例として,7G波形,ダミー人形1体の1A条件における試験状況を図1に示します。
道路運送車両の保安基準では,ダミー人形の傷害評価はHIC(頭部合成加速度から算出),胸部合成加速度の累積時間3msの値,および大腿部荷重の3つの指標が定められています。ここでは,これらの指標を頭部傷害値(HIC36),胸部傷害値(3msG),および大腿部傷害値(大腿部荷重)と定義しました。
これらの指標に対して,傷害基準(HIC36:1000以下,3msG:60G以下,大腿部荷重:10kN以下)を定めており,本試験においてもこれらを準用しました。
なお,14G波形の試験条件では,ダミー人形に保護ベルトを着用させましたが,これは前席との衝突後にダミー人形が大きく逸脱して破損するのを防ぐためであり,前席との衝突で得られる各部傷害値結果に影響を与えるものではありません。
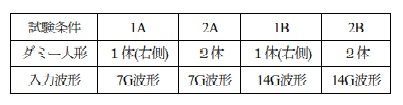 表1 試験条件
表1 試験条件
 図1 試験状況(1A 条件)
図1 試験状況(1A 条件)
3 スレッド試験結果
表2に各試験条件におけるダミー人形の傷害値の結果一覧を,図2に試験後の状況を示します。表2より,7G波形の試験条件では,各ダミー人形の傷害値が傷害基準値を超えることはありませんでした。頭部,胸部傷害値はいずれも基準値に対して十分小さく,胸部においては直接シートに衝突しませんでした。大腿部傷害値は1人着座の方が大きく,左大腿部で5.4kN,2人着座は3.6kNとなり,最大でも基準値10kNの 54% 程度となりました。高速度カメラによる解析より,まず脛および膝が背ずり下部に衝突し,これによりシートとダミー人形がともに前傾し,頭部が背ずり上部に衝突することが分かりました。膝衝突時に,シート上部にある受けがストッパを乗り上がり(本来は受けとストッパによりシートの左回転を止めます),1A条件では,シートの右側のみの衝突のため,シートが左回転し,頭部が衝突した後,ダミー人形は側方に倒れ込む結果となりました(図2(a)参照)。
14G波形の試験条件では,全ての傷害値が7G波形の試験結果よりも大きくなり,1B条件における左大腿部傷害値が基準値を超えました。高速度カメラによる解析より,1B条件では脛および膝がシート背面下部に衝突し,これによりシートが前傾して回転する過程で,頭部
が背ずり背面上部に衝突しました。その後もダミー人形の進行が止まらず,シートは 90°以上回転し,保護ベルトでダミー人形の飛び出し量を制限していたため,最終的には図2(b) のようにダミー人形は右側方に転倒しました。試験後にダミー人形を調査したところ,左脚の膝関節下部の脛の溶接部が破断していました。これは脛が衝突した箇所と膝が衝突した箇所の強度差により,膝下に著大なせん断力が発生したことが原因と推定しました。2B条件では左右2体ほぼ同時に衝突するため,シートはほとんど回転しませんが,シートの脚台が前方へ大きく変形して破断し,最終的にはダミー人形は左右いずれも側方に転倒しました(図2(c) 参照)。いずれの条件も保護ベルトがなかった場合,ダミー人形は前方へ飛び出すと推測されます。大腿部傷害値の左右差および1人着座の方が傷害値が大きくなる傾向は,7G波形と同様でした。
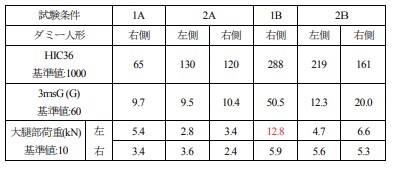 表2 ダミー人形の傷害値の試験結果
表2 ダミー人形の傷害値の試験結果
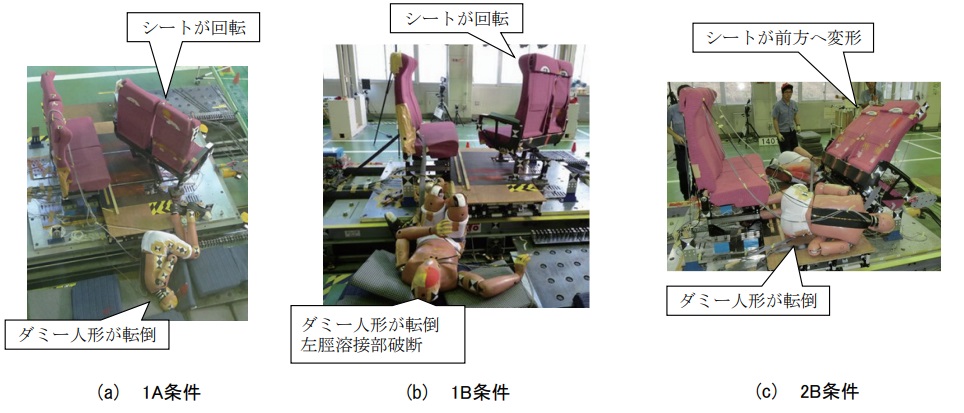 図2 スレッド試験後のダミー人形とシートの状況
図2 スレッド試験後のダミー人形とシートの状況
車両構造技術研究部 車両強度 主任研究員 沖野 友洋
【解説】車両用補助電源装置の変遷(下)
1 はじめに
鉄道車両に必要な電気は走行用の電気だけではありません。たとえば照明装置,空調装置の電気はどこから供給されるのでしょうか。
ここではその供給源となる車両用補助電源装置の役割,歴史と展望について紹介します。前号では補助電源装置の役割,黎明期から最近まで広く採用されてきた電動発電機(MG)について紹介しました。
今回は現在主流となっている静止形インバーター(SIV)と最近の動向について紹介します。
2 静止形インバーター
SIV はインバーター装置(スイッチング素子により直流から交流に変換する装置)と波形を滑らかにするフィルター装置(交流リアクトルおよび交流コンデンサー),変圧器から構成されます(図1)。インバーター装置は主回路で使用されているインバーター装置と同様の構成となっていますが,動作方法が異なります。主回路のインバーター装置は電圧,周波数を変化させて制御します(VVVF:Variable Voltage Variable Frequency:和製英語)。
これに対し,補助電源装置(補助電源装置の役割は前号参照)として使用されているインバーター装置は定電圧定周波数(CVCF:Constant Voltage Constant Frequency:和製英語)で制御しています。入力側の直流電圧を三相交流に変換し,フィルター装置で正弦波に近い波形とした後,変圧器を介して低圧交流を出力しています。制御に必要な低圧直流は,得られた交流を整流することで得られます。なお,交流電車では主変圧器の3次巻線から得た交流を整流して直流にした後,SIV に入力することが一般的です。
国鉄における SIV の車載は 1960(昭和35)年でした。車内の蛍光灯用インバーターが搭載されました。当初,照明は白熱灯が使用されていましたが,蛍光灯は白熱灯よりも明るいことが確認され,翌年度以降も普及しました。1962(昭和37)年には,客車用の電気式冷水器用電
源としてオロネ10形にインバーターが設置されました 1)。容量は 400VAでした。客車は直流 24Vの制御電源しか持たないため,商用電源で動作させるための変換器が必要でした。その変換器用として,インバーターが搭載されました。当初は初期故障も発生しましたが,その後は安定して動作したようです。その実績と安定性から,1965(昭和 40)年には新幹線0系(3次車)に列車無線用電源として採用されました。容量は1kVAでした。SIVは省電力かつ安定性が求められる ATC 電源や非常電源などに採用されていきました。
初めて車両用補助電源装置として SIVを搭載した車両は東京都交通局 6000 形電車で 1968(昭和43)年に登場し,容量は 7.5kVAでした(サイリスターをスイッチング素子として使用していました)。
その後,パワーエレクトロニクスの技術の発展とともに,SIV の技術も発展しました。使用するスイッチング素子は上記6000形など当初はサイリスターでしたが,GTO(Gate Turn Off サイリスター),IGBT(Insulated GateBipolar Transistor:絶縁ゲートバイポーラトランジスター)へと変遷しました。最近では SiC(Silicon Carbide:炭化ケイ素)を用いた SIV を搭載した車両もあります。この変遷は主回路用のインバーターと同様であり,小型軽量化,低損失化などが図られています。
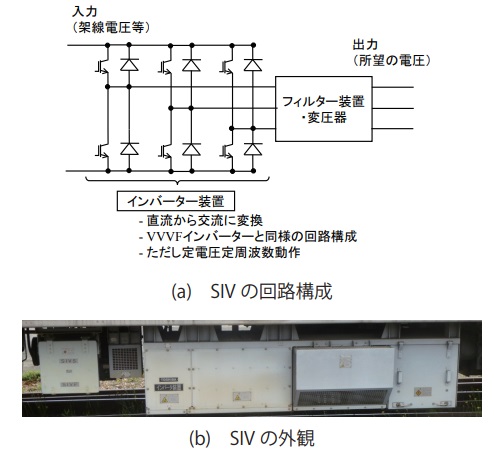 図 1 SIV
図 1 SIV
3 最近の動向
走行用以外の車両の電気を賄う補助電源装置は,安定した動作が求められています。近年は,お客様へのサービスのため補機に必要な電力は増加している一方,安定した動作や冗長性が求められています。信頼性の向上や大容量化と省エネルギーの両立など,最近の補助電源装置の動向について紹介します。
3.1 主回路用 VVVF インバーターとの共用
補助電源装置もインバーターとなったことで,構成要素,とくに半導体部分については主回路用インバーターと共通になりました。補助電源装置が故障した場合,主回路用のインバーターの 1 群を CVCF動作させることでSIVの役割をさせる車両もあります(図2)。これにより,補助電源装置の信頼性が向上します。
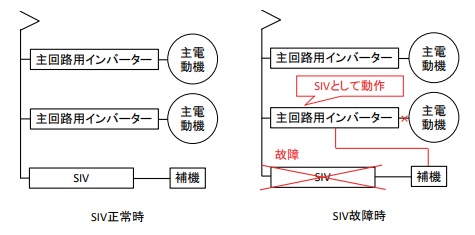 図2 主回路用インバーターとの共用
図2 主回路用インバーターとの共用
3.2 延長給電方式
通常1台の補助電源装置は編成内の数両分の補機電力を賄っています(図 3 左)。そのため,1台の補助電源装置が故障すると,該当する車両の補機電力を賄うことが不可能となります。異常時のみ他の SIV から延長して給電することで,使用できる補機電力に制限がかかるものの,編成全体の補機を動作させることが可能となります。この方式は延長給電方式と呼ばれています(図3右)。
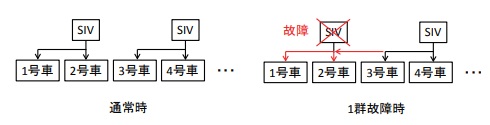 図3 延長給電方式
図3 延長給電方式
3.3 並列同期運転と待機二重系
1台の補助電源装置で編成内の補機電力を賄う場合,その補助電源装置が故障してしまうとサービス低下につながります。そのため,複数台のSIVを並列で使用する例も増えています(図4)。これにより,負荷が大きい場合にも対応できると同時に,一つの群が故障した場合でも残りの健全な群で補機に必要な電力を賄うことができ,冗長性が向上します。この運用方法は並列同期運転と呼ばれています。また,補助電源装置を2群搭載し,通常時は1群使用し,故障した場合のみもう1群を使用する運用もあります。この方法は待機二重系と呼ばれています(図5)。 補助電源装置の負荷である空調装置は季節により負荷の変動が大きくなります。そこで,空調負荷の大きい時
期には複数台の補助電源装置を稼働させ,空調負荷の小さい時期は1台の補助電源装置を停止させ,残りの補助電源装置で補機電力を賄うような運用をしている車両も登場しています。一般的にインバーター装置は軽負荷で運用するよりも定格負荷付近で運用するほうが効率は良いです。そのため,軽負荷時には何台かの運転を休止し,1台を定格負荷付近で運用することで補助電源装置全体としての効率向上を図っています。この制御方法は並列同期・休止運転と呼ばれています(図6)。大きな負荷への対応と信頼性向上を満たしつつ,省エネルギーに対する要求も満たしています。
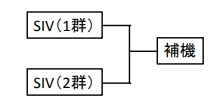 図4 並列同期運転
図4 並列同期運転
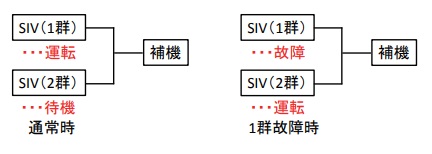 図5 待機二重系
図5 待機二重系
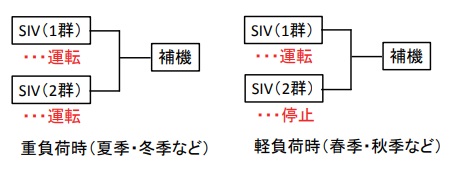 図6 並列同期・休止運転
図6 並列同期・休止運転
4 おわりに
補助電源装置は主回路機器と比較すると目立たない装置のように見えますが,車両には必要不可欠な装置です。
昨今,省エネルギーと快適性向上の両立が鉄道車両に求められています。これを実現するための鍵となるのが補助電源装置です。車両の縁の下の力持ちとして機能してきた補助電源装置の重要性は今後ますます高まるでしょう。
今後はハード面と運用面の両面から,サービス向上のための大容量化も対応しつつ,冗長性を確保しつつ省エネルギーになるよう補助電源装置の開発が進んでいくことでしょう。
注) 本稿は「RRR Vol.74 No.10」(2017 年 10 月発行)より「鉄道技術来し方行く末」の内容を一部編集したものである。
参考文献
1)福原俊一:国鉄~ JR 電車の SIV,電気車の科学,Vol.47,No.4,p41-45,1994
車両制御技術研究部 駆動制御 副主任研究員 仲村 孝行