25. Next-generation tilt control system compatible with high-speed driving
The next-generation tilt control system developed by the Railway Technical Research Institute detects current running position using a gyroscope, and precisely matches the tilting behavior of the carbody with the geometry of the curved section. This suppresses low-frequency lateral acceleration and reduces the occurrence of motion sickness. Applying this system to higher-speed trains requires technology that allows the carbody to tilt more quickly and stably.
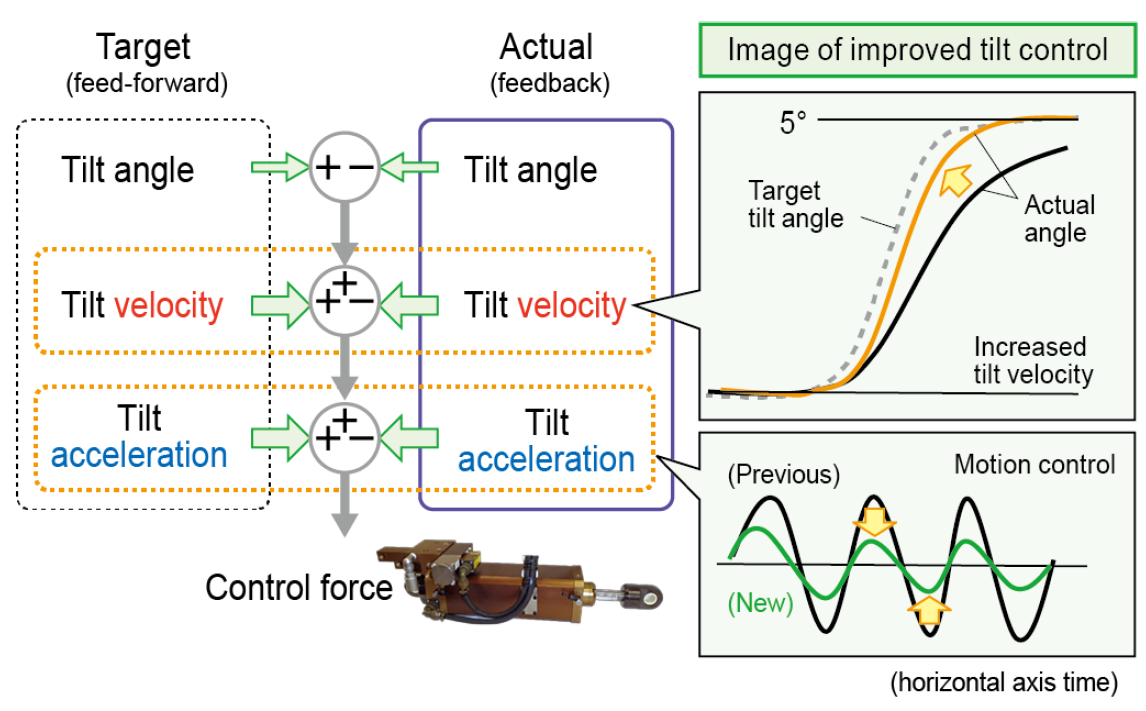
We developed a new control algorithm that actively considers not only the tilt angle but also the tilt velocity and the tilt acceleration (Figure 1).
This algorithm enhances control by increasing force during high-speed curves, when rapid tilting operations are necessary, and when the carbody experiences lateral vibrations, regardless of whether the track is curved or straight. This is an improvement over the previous algorithm, which only accounted for feedback on tilt angle and tilt acceleration.
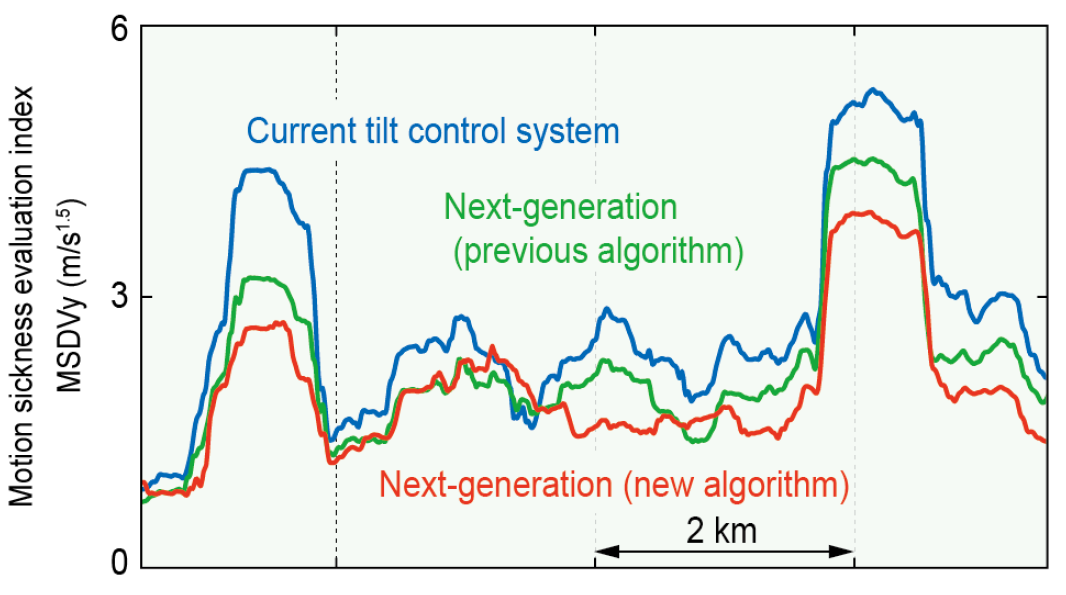
When the new algorithm was applied to the next-generation tilt control system and running tests were conducted, it was found to suppress low-frequency lateral motion more effectively than both the conventional tilt control system and the next-generation tilt control system using the previous algorithm.
Additionally, it reduced the motion sickness evaluation index related to carbody tilting (Figure 2).
We also confirmed that the new algorithm effectively suppresses the yawing motion characteristic of tilting vehicles, which often occurs at high speeds on straight tracks, and improves ride quality by reducing higher frequency vibrations.
The next-generation tilt control system, utilizing the new algorithm, can improve the ride quality of tilting vehicles in a wide range of train speeds.