22. Wheel slip suppressing control method using difference in current from the traction motors
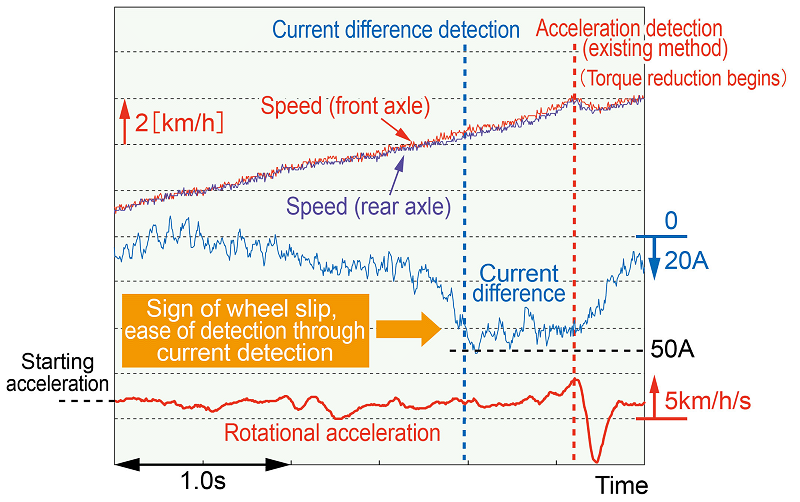
Ordinarily, wheel slips are detected using rotational acceleration and difference speed (slipping speed) from the traction motors. Many trains operate using a main traction circuit system where a single invertor will drive multiple traction motors. In the present case, for the main traction circuit control system which drives two traction motors without speed sensors within a bogie, tests on an actual vehicle confirmed that wheel slips could be detected earlier in either of the axles by focusing on difference in main traction current rather than rotational acceleration (Fig. 1).
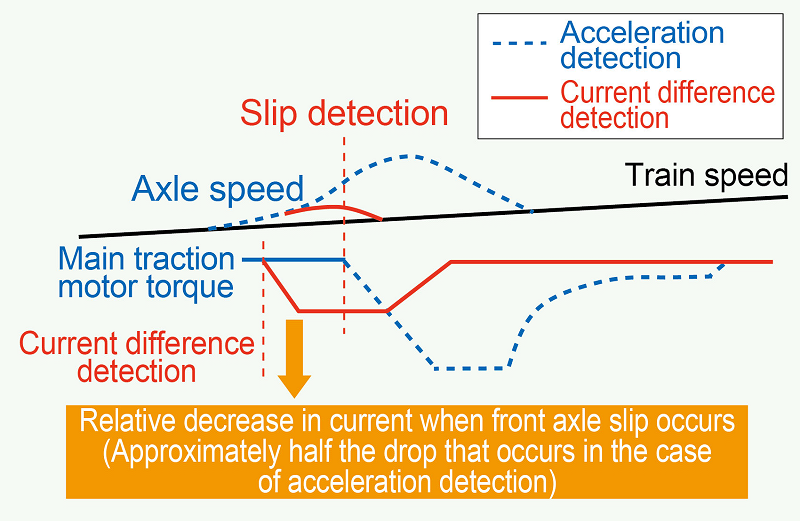
In conditions prone to wheel slipping, such as rain, the front axle in the direction of travel frequently begins slipping before the rear axle due to axle-weight transfer, and a large difference in current occurs before slipping is detected through rotational acceleration (the largest difference in the vehicle used for the present test was around 50A), which demonstrated a strong likelihood that this could be used as a sign of wheel slipping. Based on this result, a method was developed to suppress wheel slip using current difference wheel slip early-detection and reducing main traction motor torque reduction only by a small amount (approximately half the amount required when slip detection is achieved through rotational acceleration) (Fig. 2). Notwithstanding, when wheel slip occurs simultaneously on both wheelsets, the re-adhesion control method previously developed for acceleration detection was applied.
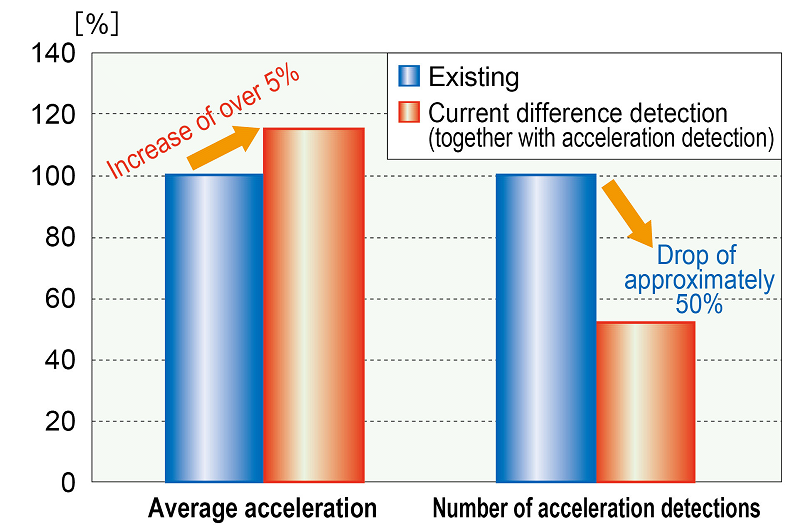
In order to verify the validity of the newly developed method, sprinkling tests were carried out using a suburban train, the average acceleration during slips increased by approximately 5%, whereas the frequency of wheel slip detected through acceleration was cut by approximately 50% (Fig. 3). This new control method which identifies current difference allows main traction motor torque control even when a vehicle is not equipped with a speed sensor (speed sensor-less), and has consequently been employed on new commuter rolling stock.