電力ニュース
2024年2月号
わたり線の管理方法の変遷と省力化
わたり線は、分岐器上で2つの電車線が交差して、本線トロリ線と側線トロリ線の高低差を一定に保持することで、円滑にパンタグラフが通過できる仕組みとなっています 1)。本稿では、わたり線を構成する交差金具の歴史を踏まえて、管理方法の変遷と省力化について紹介します。
わたり線において、1951年頃は「水平金具と垂直金具」が採用されていました。水平金具は、本線と側線のトロリ線間隔が広がるのを抑え、高低差を容易に判別するために設けられましたが、パンタグラフとイヤー部との衝突事故多発により、1970 年頃に廃止されました。この間のわたり線の管理基準は、「軌道中心間隔が940mmあるいは900mmの位置」で、「両トロリ線の高低差を30mm以内(在来線)」としていました 2)。940mmの根拠は、パンタグラフの全長1880mmの半分です。
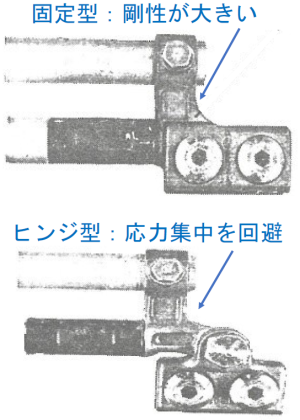
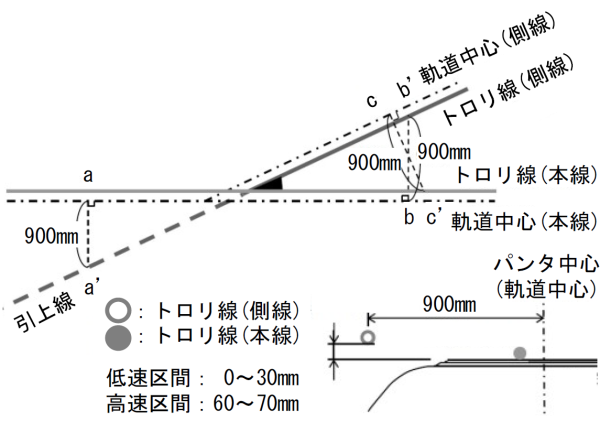
自動張力調整装置の採用以降、トロリ線移動に追従できるように「交差金具(固定型)」が開発されました 1)(図1上)。しかし、イヤー部とパイプ取付金具が一体型であったため、トロリ線への応力集中による疲労破断が相次いで発生しました。当時のわたり線の管理基準は、「トロリ線間隔が900mmの位置」で、「両トロリ線の高低差を30mm(在来線)、60mm(新幹線)」としていました 1)。この課題の対策として、イヤーとパイプの接続部をヒンジ構造とした「交差金具(ヒンジ型)」が1976 年に開発されました 1)(図1下)。また、1979 年頃に架線測定器 3)が開発され、わたり線の管理基準は、「架線測定器の中心(=軌道中心)から相手方トロリ線との距離が900mmの位置」で、「両トロリ線の高低差を0~30mm(在来線)、60~70mm(新幹線)」となり、現在に至っています(図2)。
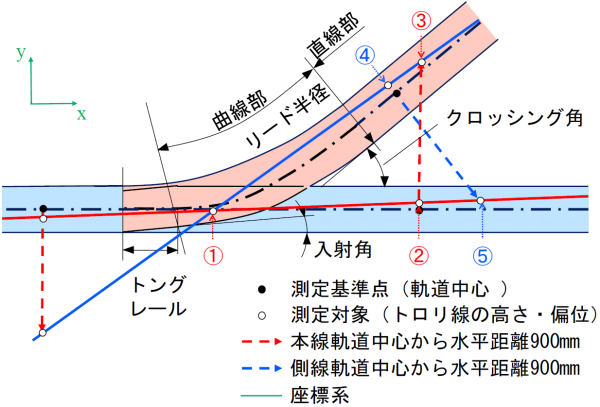
架線測定器による測定は、本線と側線を複数回移動することや作業時間の制約から、労力がかかるため、省力化が求められています。そこで、分岐器の開き角に着目して、座標系(x,y軸)で表現することで、本線にいながら側線基準の測定を行う方法を検討しました 4)(図3)。測定手順として、まずは本線軌道中心からの測定①②③を行うと同時に、それらの座標値を取得し、④⑤の座標値を算出します。次に、⑤に移動して、側線軌道中心からの測定④⑤を行います。これにより、側線軌道に移動せずに測定可能です。
[参考文献]
- 1) 日本鉄道電気技術協会:電車線路技術Q&A集(平成26年度版)、pp. 76-81、2014
- 2) 日本国有鉄道:電車線保守の手引き、pp. 21-22、pp. 286-289、1968
- 3) 金丸義仁:わたり線測定器、電気鉄道、Vol. 33、No. 6、p. 37、1979
- 4) 宇治他:わたり線における架線高低差測定の効率化に関する検討、TER-23-083、2023
気象情報・地形情報を用いたがいし汚損度推定手法 (その3:急速汚損での精度検証結果)
がいしの汚損には長期間暴露した場合の通常汚損と台風や勢力の強い低気圧の通過に伴って発生する短時間の汚損(急速汚損)があります。電力ニュースNo.120(2022年12月)では、明かり区間における通常汚損について、開発した汚損度推定手法の精度を検証しました。今回は、2022年度冬季の日本海沿岸(鉄道総研 勝木塩害実験所)にて得られた急速汚損の実測値を用いて本手法の精度を検証した結果 1)をご報告します。なお、汚損度の実測に用いた懸垂磁器がいしは、一般に沿面距離の長い保護面に絶縁耐力を期待しているため、以下の検証は保護面についての結果です。
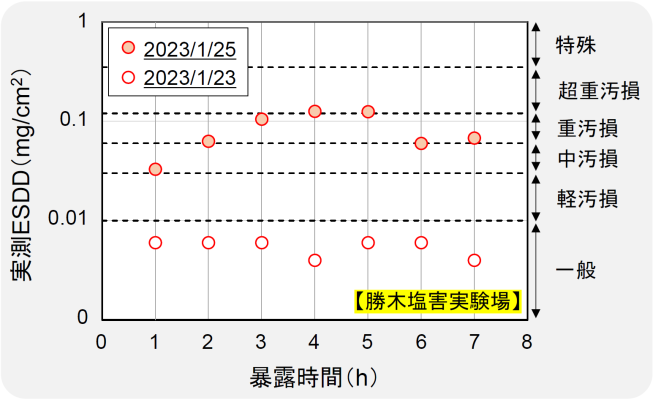
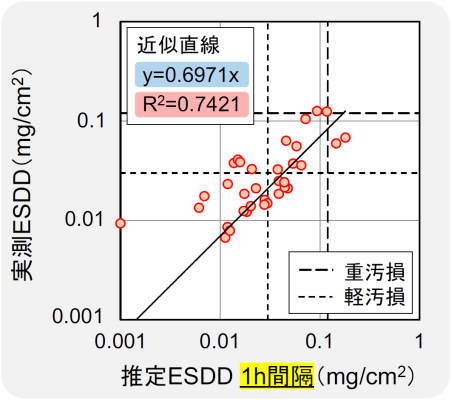
図1に屋外に暴露したがいしの汚損度推移を示します。1/23は雨が降っており風も内陸側から吹いていたため、一日を通して汚損度が大きく上下していない一方で、1/25は海側からやや強い風(平均風速7.7m/s)が吹く雪の一日であったため、付着した海塩が雨洗されずに短時間で超重汚損に至っています。短時間で超重汚損に至る日について、汚損度の実測値と推定値を比較した結果を図2に示します。推定値は実測値とよく一致しており、開発した手法をそのまま急速汚損の推定に適用できる可能性は高いと言えます。なお、推定には実験所から約10km離れた気象庁観測点の公開データを用いておりますが、気象庁の観測点は約21km間隔で設けられていることから、観測点間のちょうど中間地点においても十分な推定精度を有することが確認できました。
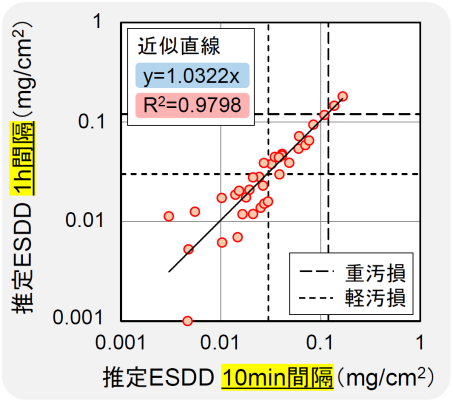
続いて、推定に用いる気象データの間隔が10分と1時間とで異なる場合の推定値の比較を図3に示します。本手法では、1時間間隔の気象データから計算される汚損量を累積して汚損度を推定しておりますが、気象庁は10分間隔の気象データも公開しています。理論上は10分間隔の気象データを用いた推定のほうが高精度となる可能性がありますが、図3を見ると、用いる気象データの間隔によらず2つの推定値はよく一致しています。急速汚損後のがいし清掃は天候回復後に行う可能性が高いと考えられることから、実際に本手法を活用して急速汚損を把握するような場面では1時間間隔の気象データで十分であると考えられます。
[参考文献]
- 1) 臼木、柴田、谷口:2023 年電気学会 産業応用部門大会 講演論文集、5-32、pp. 227-230、2023
複数の地上蓄電装置の統括制御による脱炭素化への貢献
電力ニュース117号(2021年12月)や120号(2022年12月)にてお伝えしたように、「2050年までに脱炭素社会(カーボンニュートラル)を実現」の目標に向けて、鉄道電力分野においても再生可能エネルギー(以降再エネ)の活用が不可欠と考えられます。上記120号において回生電力吸収と余剰再エネ電力吸収の両立を図る地上蓄電装置(以下蓄電装置)の「両立制御方式」をご紹介しました。ただし、蓄電装置の導入費用は高く、一気に新規導入するのは容易ではありません。したがって、現状適用されている蓄電装置を再エネ活用することで、CO2削減に対する費用対効果を高めることが現実的です。一方で、現状の直流き電系統向け蓄電装置の規模は0.5MWh/台以下であり、単独での再エネ電力活用による効果は小さいのが課題です。
そこで、直流き電系統に接続された複数の蓄電装置を集約することで、電力系統の需給調整(デマンドレスポンス:DR)を可能とする容量(調整力)の確保を実現することが解決方法の一つとして考えられます。ここでは、複数の変電所に存在する蓄電装置の統括制御手法を、運転電力シミュレータ上に実装し、その有効性をシミュレーションで模擬検証しました。なお、DRの具体的な説明は電力ニュース117号をご参照ください。
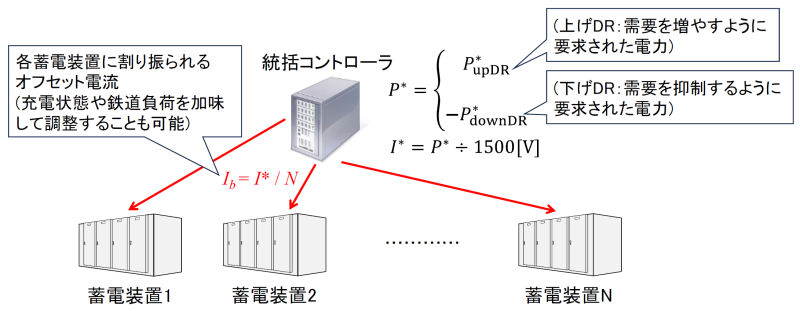
前述した両立制御方式では、余剰再エネ電力に相当するオフセット電流を設定することで、蓄電装置の充放電特性を変化させていました。今回提案する統括制御のイメージを図1に示します。複数の蓄電装置に対して拡張する基本的な手法として、統括コントローラから装置台数分で割り振ったオフセット電流値を、各装置に指令値として配分します。また、オフセット電流を、蓄電装置の充電状態あるいは付近に存在する鉄道負荷を加味して再配分(調整)する機能もシミュレータに実装しました。
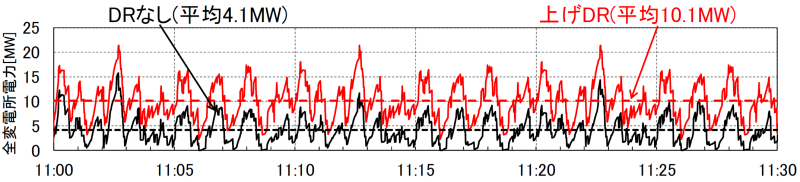
一例として日中に6MWの需要電力を増やす「上げDR」をシミュレーション対象モデル路線に適用した際の、30分間の変電所電力のシミュレーション結果例を図2に示します。上げDRとして要求された電力にほぼ対応して各蓄電装置が充電して平均電力が増加し、狙いとする需給調整機能が得られました。
今後も引き続き脱炭素化に資する鉄道電力システムの検討を進めていく予定です。
パンタグラフの揚力特性が動的挙動に与える影響の基礎的理論検討
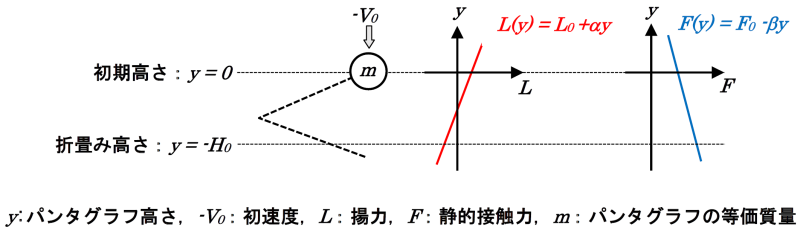
新幹線用パンタグラフは高速走行中に作用する揚力を適切な値に維持することが重要です。なかでも舟体は揚力特性への寄与が大きく、すり板摩耗時にも揚力が大きく変化しないような設計がなされています。しかしながら、高頻度ではないものの揚力が低下することがあり、その状態で舟体に外力が加わった場合、パンタグラフが長時間の離線状態となりうることが考えられます。そのため、パンタグラフの揚力特性と上下方向の運動に関する動的挙動の関係について検討することは重要です。本稿では、新幹線用パンタグラフの長時間離線に着目し、パンタグラフの舟体に作用する鉛直方向の外力を鉛直方向の初速度に置き換えるなどした簡単な力学モデルに基づき理論検討を行うことで、パンタグラフの揚力特性および舟体の鉛直方向初速度がパンタグラフの上下方向動的挙動に与える影響について検討した結果を紹介します。
本検討で使用した力学モデルは図1に示すようなモデルで、パンタグラフを1つの質点としてモデル化しています。この質点がトロリ線の位置に相当する高さy = 0(以降、初期高さ)において鉛直下方に初速度V0で運動を始めた後、再度初期高さに復帰した状態を再着線と定義して、時刻0sから再着線するまでの時間を離線時間と考え、揚力特性と離線時間の関係について調査しました。このモデルでは、パンタグラフの揚力特性および押上力特性を、初期高さにおける揚力L0および揚力変化率α、初期高さにおける静押上力F0および静押上力変化率βにより、次のように仮定して与えます。

なお、本稿では、初期高さにおいて揚力と静押上力の和が正(L0 + F0 > 0)であること、ならびに作用高さが変化した際の静押上力変化率βが揚力変化率αと比べて小さいこと(α − β > 0)を仮定しました。図1の力学モデルの運動方程式は式(2)となり、式(2)の解は式(3)のように表されます。

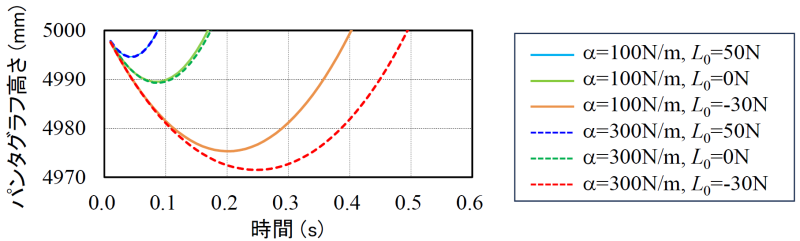
上記の運動方程式の解より、図1の力学モデルの質点の軌跡を計算することができます。その一例を図2に示します。本計算結果より、初期高さにおける揚力が小さい場合には、揚力変化率αの差が離線時間に大きく影響を与えるが、初期高さにおける揚力が適正な場合には、揚力変化率αの影響が小さいことなどがわかります。本稿で提案したモデルにより、パンタグラフの揚力特性や押上力特性が離線発生時の離線継続時間に与える影響を把握することができ、対策の検討などに活用できると考えています。
【ワンポイント講座】集電系に求められる性能とその評価方法
新開発の架線構造やパンタグラフの実用化、新線開業時や既設路線の速度向上に際して、対象の集電系が安全かつ安定した集電を実現できることを確認する必要があります。本稿では、速度向上試験における架線・パンタグラフ系の評価を例にとり、集電系に求められる性能とその評価方法について解説します。
速度向上試験において集電系で確認すべき性能は、文献 1)に詳しくまとめられており、①離線、②離隔、③偏位、④疲労強度の4 点が挙げられています。
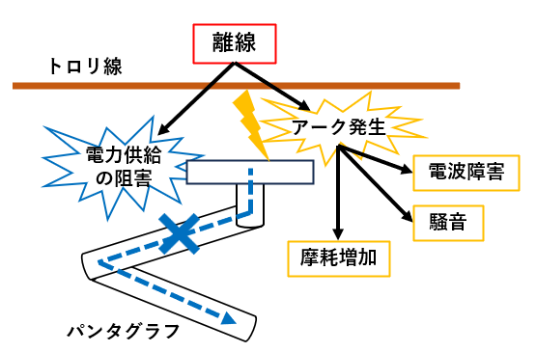
①離線 架線とパンタグラフが機械的に離れる(離線する)と、車両への電力供給の阻害、アークの発生による摩耗の増加、騒音や電波障害につながります(図1)。これらの影響は車両の主回路形式やすり板材質、電化方式などによって異なります。各影響を直接評価することは難しいため、離線の継続時間と離線率(離線時間の総和の走行時間に対する割合)を算出し、車両回路や電化方式を基に設定した目安 2)に沿って離線の発生程度を評価する方法が用いられます。
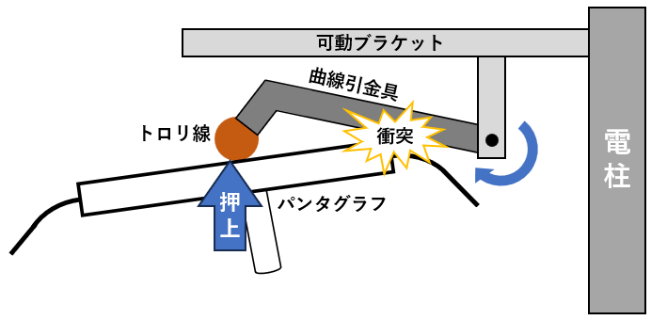
②離隔 パンタグラフ通過時にトロリ線が押し上げられて生じる変位が大きいと、曲線引金具などとパンタグラフが衝突する可能性があります(図2)。これを防ぐために、パンタグラフと架線金具の離隔をトロリ線押上量から評価します。トロリ線押上量の目安は、装柱構造やパンタグラフ舟体・ホーンの形状によって決まります。例えば、曲線引金具のストッパ動作位置から余裕を加味した値を用います。
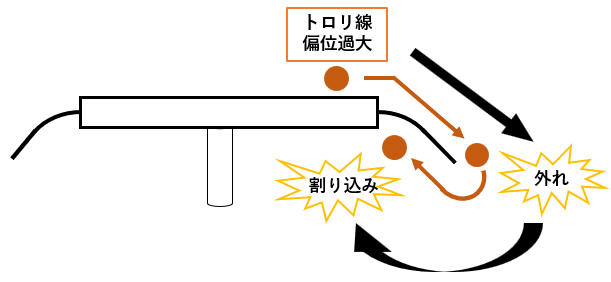
③偏位 曲線部での車両の変位や傾斜、わたり線などでパンタグラフに対するトロリ線偏位が過大になると、パンタグラフ舟体からトロリ線が外れ、最悪の場合舟体下に割り込み双方の損傷を招きます(図3)。これを防ぐために、列車走行時のトロリ線偏位を評価します。トロリ線偏位の目安として、わたり線を除くオーバーラップ区間や一般区間において、トロリ線とパンタグラフの接触位置が主すり板の範囲内にあることが望ましいとされています。
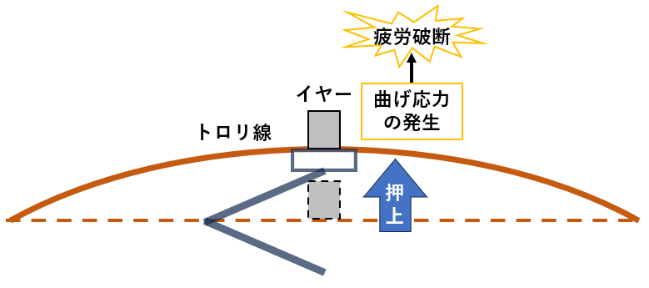
④疲労強度 トロリ線はパンタグラフのしゅう動に伴って変形・振動し、これにより発生する繰り返し曲げ応力によって疲労破断する可能性があります(図4)。摩耗限界に達する前にトロリ線が疲労破断するのを防ぐために、パンタグラフ通過時にトロリ線に発生する曲げひずみを評価します。これまで一律の目安値が用いられていましたが、トロリ線線種に応じた目安値を提案しています 3)。
[参考文献]
- 1) 鉄道総合技術研究所:在来鉄道運転速度向上試験マニュアル・解説、1993
- 2) 鉄道総合技術研究所:電車線とパンタグラフの特性、1993
- 3) 小原拓也:高強度トロリ線のひずみ目安値の提案、電力ニュースNo.122、2023