電力ニュース
2022年4月号
割り込みが発生し得るトロリ線偏位とパンタグラフ揚力の限界値について
パンタグラフが走行中に強い横風を受けた際に、割り込み事故が発生する場合があります。割り込み事故の防止については、トロリ線の静的な左右偏位の管理値が定められており、この管理値は強風等によりトロリ線の偏位が一時的に増加した場合でも割り込みが発生しないように(具体的には、割り込みが発生し得る偏位の限界値を超えないように)設定されています。偏位の限界値の算出においては、パンタグラフ揚力は静押上力と同等の値に設定することが一般的ですが、近年の研究により、横風によってパンタグラフ揚力が静押上力よりも大きな値まで増加する場合があり(電力ニュース2019年12月号参照)、従来の検討方法を拡張する必要があることがわかってきました。
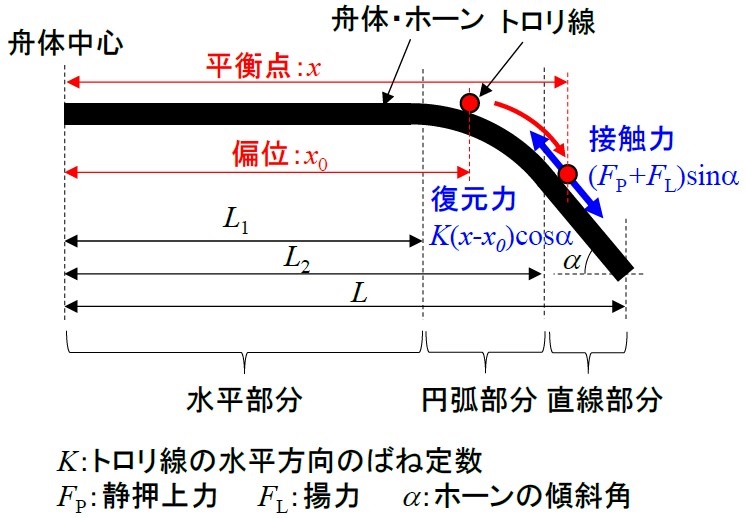
そこで、古くからある静解析に基づき、割り込みが発生し得るトロリ線の動的な左右偏位(以下、偏位)とパンタグラフ揚力(以下、揚力)の関係について検討を行いました。図1に本検討で用いた静解析のモデル図を示します。トロリ線が強風により舟体の水平部分より外側の偏位x0(x0>L1)にはらんだ状態で舟体と接触し、外方の平衡点x(ただし、xはホーンの直線部分上(L2<x0<L)にあるとします)まで移動した場合について、平衡点における静的な力のつりあい式を求めると以下の式(下川の式)が得られます。
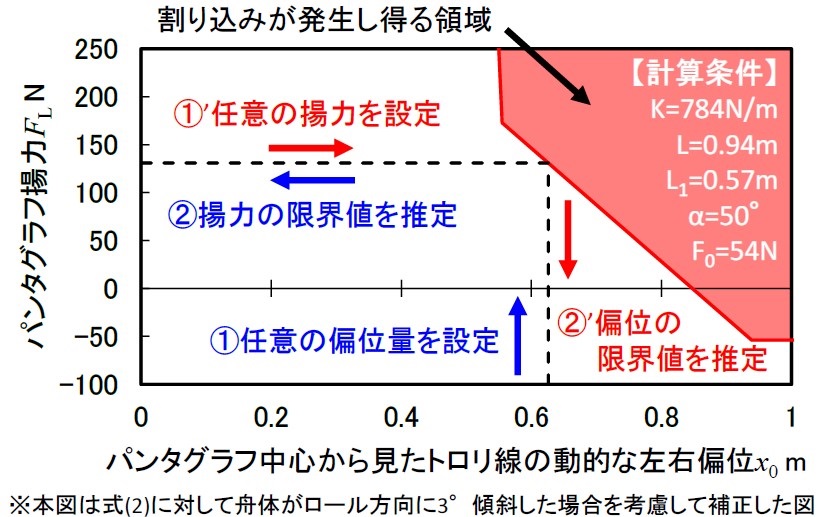
ここで、平衡点xがホーンの先端(舟体中心からの距離L)に達した場合に割り込みが発生することから、割り込みが発生し得る偏位x0と揚力FLの関係は以下の式により得られます。
なお、トロリ線がホーンの円弧部分上を移動する場合には、同様の解析により式(2)よりも小さい揚力においてホーンの直線部分に移行することから、割り込みの発生条件は式(2)に含まれることになります。
一般的な架線・パンタグラフの諸条件に基づいて、式(2)により偏位x0と揚力FLの関係を図示した例を図2に示します。図2より、割り込みが発生し得る偏位と揚力の関係を視覚的かつ定量的に把握することができ、任意の偏位量に対する揚力の限界値や、任意の揚力に対する偏位の限界値を推定できます。実際の施工管理においては、対象とする架線・パンタグラフの諸条件に応じて式(2)から図2を作成することで、架線側とパンタグラフ側の双方の視点で割り込みが発生し得る限界値を整理することができます。
トロリ線接続施工におけるクセ低減手法について
トロリ線が局所的に摩耗した場合、摩耗箇所のトロリ線を切断して新線に張り替え、切断箇所で新線と旧線を接続して張替コストの低減を図ることがあります。その際、接続箇所の段差や、施工時に工具を取り付けた箇所に加わる応力により発生するクセが離線などの集電性能悪化の要因になる可能性があります。トロリ線のクセはある程度除去できますが、クセ除去の施工精度やトロリ線に大きな応力が加わった履歴が残る点に課題があります。そこで、施工時に発生するクセの低減手法を検討しました。
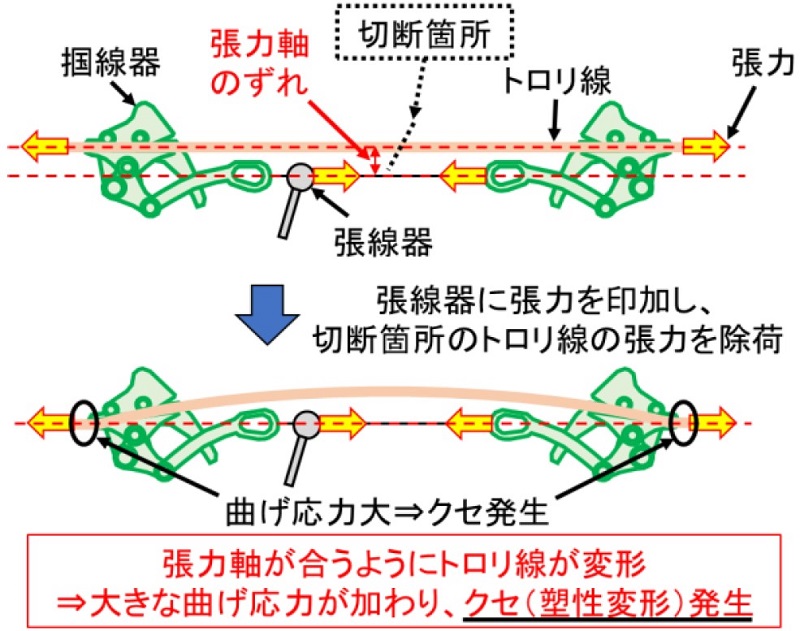
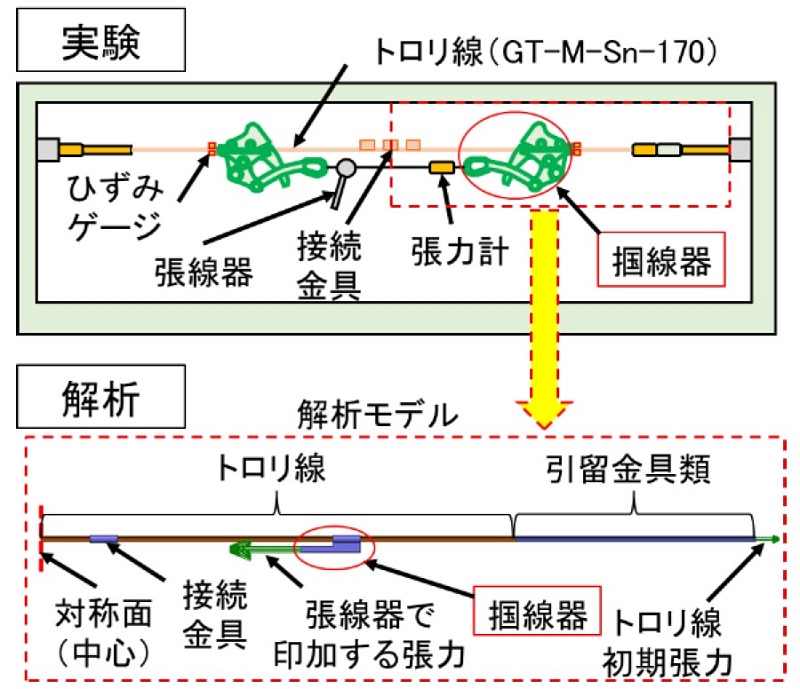
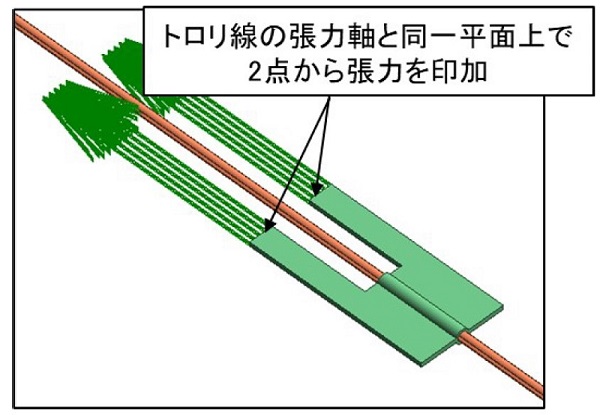
トロリ線にクセが発生するメカニズムを図1に示します。トロリ線を切断する前段の張力を除荷する作業で張線器と掴線器という工具を使用します。この工具で加える張力の軸とトロリ線の張力の軸がずれているため、工具に張力を加えていくと張力軸が合うようにトロリ線が変形し、掴線器把持部では大きな曲げ応力が加わるため、クセが発生します。切断箇所のトロリ線の張力を除荷する実験と解析を図2のように行いました。実験と解析は次の3ステップで実施しました。ステップ1:トロリ線に初期張力を印加。ステップ2:張線器の張力を徐々に印加して切断箇所のトロリ線の張力を除荷。ステップ3:張線器の張力を除荷してトロリ線を初期張力に戻す。実験と解析の結果を比較したところ、ステップ2ではトロリ線の張力やひずみの推移が概ね一致し、ステップ3では実験・解析ともにクセが残ることを確認しました。
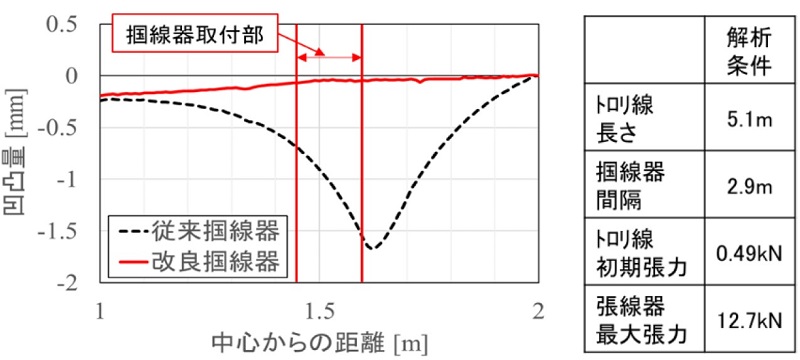
解析の妥当性が概ね確認できたため、解析にてクセ低減手法を検討することとしました。クセの発生メカニズムから、トロリ線の張力軸と同一平面上で2点から等しく張力を印加できる工具形状がクセ低減に有効と考えられます。図3のように改良掴線器の解析モデルを構築し、図2の掴線器と改良掴線器に対して解析を行い、ステップ1とステップ3でのトロリ線高さの変化量(凹凸量)を比較した結果を図4に示します。図4より改良掴線器でクセが低減できることを確認しました。今後は改良掴線器を製作し、実際にクセが低減できるか調査するとともに、クセの凹凸振幅の大きさと集電性能の関係を調査する方針です。
線条位置情報を活用した電車線金具画像正規化手法
鉄道総研では、電車線検測に画像処理を適用して検査の自動化を図る研究開発に取り組み、線条の静的な3次元位置測定が可能な電車線非接触測定装置や機械学習による電車線金具位置検出手法を開発しています。今回、機械学習による電車線金具の異常検出の精度向上を目的に、線条位置情報を活用して画像を正規化する手法を開発しましたのでご紹介します。
カテナリ式架空電車線は、場所によってトロリ線とちょう架線の距離が異なり,そこに設置される電車線金具も長さが異なります。一方で、一般的な機械学習アルゴリズムは正方形の画像入力を前提としたものが多く、縦長や横長の画像は入力時に正方形となるよう変形されます。このため、ハンガやコネクタ画像の縦方向の伸縮率にばらつきが生じるので、これを抑えることで機械学習の学習プロセスの効率化が可能であると考えられます。また、電車線金具の異常は線条との接続部近傍で発生する場合が多く、画像を正方形に変形する際に線条近傍が縮小によりつぶれないように変形方法を工夫することで異常検出精度を向上させることが可能であると考えられます。
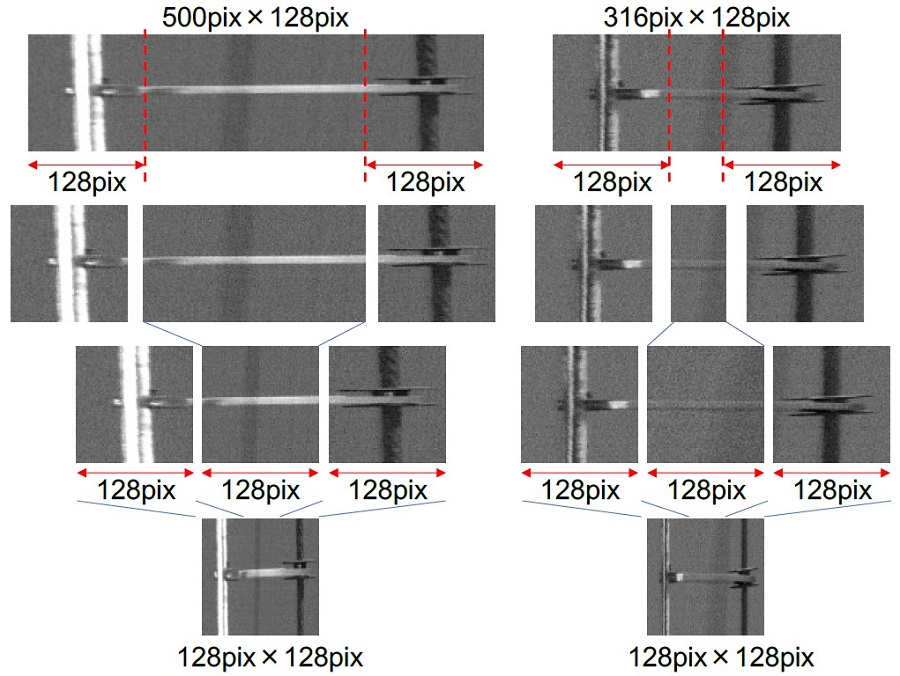
そこで、学習と異常検出の両方のフェーズで電車線金具画像の伸縮率のばらつきを抑え、なおかつ線条近傍の情報量を保つような画像変形手法として、トロリ線およびちょう架線の位置情報を活用して画像を正規化する手法を提案しました。例えばハンガの場合、図1のように画像をトロリ線、ちょう架線近傍の領域と中間の領域の3つに分割し、線条近傍の領域の伸縮率は一定とすることで、ハンガの長さによらず、ハンガイヤー部およびハンガカバー部の縦横比が一定となった学習用画像が生成できます。異常検出時にもこの正規化手法を適用することで、ハンガが長い場合においても、ハンガイヤー部やハンガカバー部が縮小によりつぶれることがない画像となります。
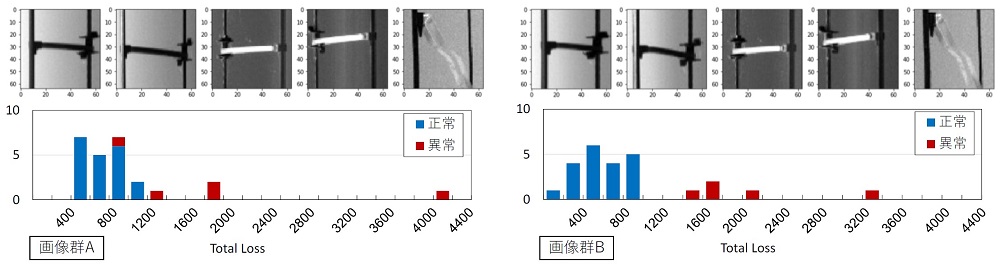
提案手法の効果を検証するため提案手法未適用のハンガ画像168枚(画像群A)と、提案手法により正規化を行ったハンガ画像168枚(画像群B)を用意してそれぞれ機械学習アルゴリズムを学習させ、正常なハンガ画像20枚と、変形などの異常を模擬したハンガ画像5枚を用いて異常検出試験を行いました。
図3に異常検出試験の結果を示します。ヒストグラムの横軸が異常の評価指標となる損失関数の値であり、しきい値を設定して、しきい値以上のものを異常として検出します。画像群Aのヒストグラムでは正常と異常の分布が重なっていますが、画像群Bのヒストグラムでは正常と異常を分離できており、提案手法を適用することにより異常検出精度を向上させることが可能であることがわかりました。
今後は、カラー画像を用いた電車線金具の異常検出手法などの検討を進める計画です。
高精度時間プロトコルに対応した直流電流計測システムの基礎検討
直流電気鉄道における高抵抗地絡故障は長年未解決の課題です。これまでの検討のうち、放電ギャップ装置1)や保護線などを追加導入する方法は、検出は確実だが設備点数や保守箇所が増えてしまう欠点があり、一方、変電所で計測される電流値のみで検出する方法は、高抵抗地絡としては比較的大電流(1000A程度以上)のアーク地絡はほぼ検出可能なレベルに達した2)とはいえ、コンクリート柱上のカラス営巣などといった100A程度の小電流の地絡が100%検出できるレベルにはまだ至っていません。
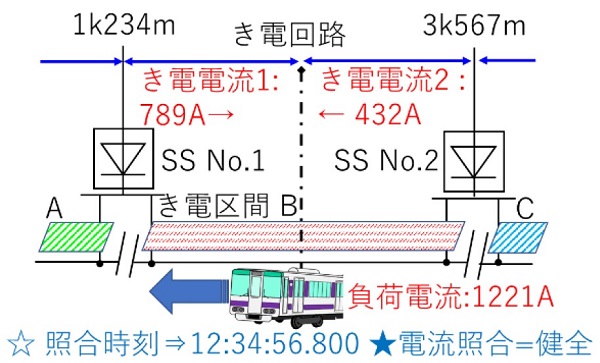
一方、変電所のき電電流(地上)と列車のパンタグラフ電流(車上)とをキルヒホッフの電流則に基づいて照合することによる地絡検出システムの概念3)は約30年前から存在していました(図1)。当時は車上と地上のデータ伝送手段が乏しかったですが、近年のICTの進展はその実現可能性に大いに資するものと考えられるため、基礎研究開発を開始しました。この方法は送電線故障を保護する差動継電器(87)の原理そのものであり、電流センサーの精度次第では100A程度の地絡検出も夢ではありません。
このような地絡検出システムには、複数地点および地上車上の各々の計測システムにて時刻同期機能を具備することが必須となります。多地点時刻同期を実現する手段として既にGNSSによるものが普及していますが、鉄道にはトンネルが存在するためGNSS信号の受信が途切れることを想定する必要があります。そこで、高精度時刻同期装置(GM : Grand Master clock)と、IEEE1588-v2規格に準拠した高精度時間プロトコル(Precision Time Protocol : PTP)を適用した計測ロガーとを組み合わせ、個々の電流値サンプリングデータに正確なタイムスタンプを付与する機能を持つ直流電流計測システムを製作しました4)(図2)。同一タイムスタンプの地上・車上電流を照合すれば、地絡による流出電流の有無の監視が可能となります。なおトンネル通過時や無線基地局とのハンドオーバ時に一時的に伝送が不安定になっても、データの再送信を組み合わせることで、ある程度の時間後には時刻同期照合が再び可能になります。
このシステムの動作試験を行い、通常運用時(GMと計測ロガーがPTPで連系されている状態)は正しいタイムスタンプが記録されることを確認しました。またGNSSアンテナを遮へいして意図的にGNSS信号の受信不能を模擬した試験も行い、GMが内蔵時計自立動作モードに移行しても時刻信号は数十分にわたって別のGPS受信機が示す時刻信号と乖離せず計測に支障は生じないことを確認しました。
今後、地上用・車上用2台の計測システムに通信機能を付加した上でき電回路の地絡故障を模擬する試験を行い、サーバ側での電流値照合方法などについて検討する予定です。

[参考文献]
- 佐藤光男:本四備讃線海峡部における直流き電地絡事故に対する保護方式、鉄道と電気、1988.7
- 森本大観:大電流のアークを伴う直流高抵抗地絡の検出手法、電力ニュースNo.116、鉄道総研、2021.8
- 電気学会技術報告(II部)第542号、p.65、1995.5
- 赤木雅陽、ほか:高精度時間プロトコルに対応した直流電流計測システムの基礎検討、令和4年電気学会全国大会、5-137、2022.3
【ワンポイント講座】「電気設備の技術基準の解釈」における『風速』について
2019年(令和元年) 9月に関東地方に上陸した台風15号により千葉県内の高圧送電線鉄塔2基が倒壊し、また多数の電柱が損壊するなどして、房総半島をはじめとした広い範囲で電力供給や電話、インターネットなどの通信回線に大きな障害が生じました。この障害の発生を受けて、経済産業大臣の諮問に応じて産業構造審議会が下部組織である保安・消費生活用製品安全分科会の電力安全小委員会に設置した「令和元年台風15号における鉄塔及び電柱の損壊事故調査検討ワーキンググループ」において、発生原因の究明や電気設備の技術基準の適切性、および再発防止策について審議・検討が行われました1)。このワーキンググループでの検討の結果、2020年(令和2年) 5月13日付けで表1の内容について「電気設備の技術基準の解釈」の改正が行われました。表1中のNo.2、No.3についてはそれぞれ鉄塔、配電線の設計で対応する内容であり、電車線路設備の設計においては、表1中のNo.1の内容『現行の基準風速40m/sを維持するとともに、40m/sが「10分間平均風速」であることを明文化』に対応することになります。そこで、本稿では気象計測における『風速』について改めて整理してご説明します。
一般に、風の観測において単に『風速』と表記する場合は、10分間の平均値を示しています。気象庁のWebサイトにおいてアメダスの気象データを閲覧することができますが、本サイトでは年ごと、月ごと、日ごと、1時間ごと、および10分ごとの気象データ(気圧、気温、風向、風速など)を表形式にまとめたものを閲覧することができます。その中で10分ごとの気象データをまとめた表では、例えば10時00分の欄に記載されている風速(Webサイト上の表には単に『平均』と表記されています)の値は直前までの10分間の平均風速を示しており、具体的には9時50分から9時59分までのデータ数2,400(サンプリング周期0.25秒)の風速観測値を平均した値を示しています。アメダスにおける風に関係する観測値の説明を表2に示します。表2によると『風速』は前述のとおりである一方、『瞬間風速』は3秒間の平均値を示しており、また『最大風速』および『最大瞬間風速』はそれぞれ、ある一定時間内における『風速』および『瞬間風速』の中で最大の値を示しています。
上述したように、今回の「電気設備の技術基準の解釈」の改正では、表1に記すように、『風速』とは10分間の平均風速であることが明記されることになりました。一方、表1中のNo.2にある『特殊地形の考慮』については鉄塔に適用される内容であると記しましたが、JR各社が設計に用いている「電気工作物(電車線路)設計施工標準 -設計標準-」(以下、設計標準)では、以前から特殊な地形について考慮することが明記されています。この設計標準では、特殊な地形においては風速を最大1.5倍まで乗算できる、と説明されています。

