車両ニュースレター
2019年7月号
[クローズアップ]新幹線電車用ボルスタレス台車開発経緯(前編)
現在,新幹線電車の台車にはボルスタレス方式の台車が用いられています。新幹線電車用ボルスタレス台車が営業で使用開始されたのは1992年ですが,実用化に至るまでには国鉄の分割民営化を挟み10年以上に渡って開発が行われました。今回は国鉄時代の開発経緯について紹介します。
国鉄時代の1980年に,当時の最高速度210km/hに対して,260km/hでの営業運転を目指して,走行安定性に優れ,乗り心地の良好な台車の開発が必要とされました。0系以来,蛇行動に対する安定性を確保する装置として側受が用いられてきましたが,高速時の走行安定性の確保のためには,台車旋回抵抗をより大きくする必要があり,摩擦係数が速度や湿潤条件によって変わりやすく,摩擦係数を上げると急曲線でのフランジ摩耗を促進する側受方式では安定性の確保が懸念されました。そこで,まくらはり(ボルスタ)を省略(レス)することで,側受とボルスタアンカをなくし,代わりに台車の旋回動作を許容する牽引装置,空気ばね装置と,旋回抵抗を与えるヨーダンパを新たに設けるボルスタレス台車の開発が行われました。ヨーダンパは,側受と同じ抵抗力飽和特性をもつオイルダンパ,摩擦式ダンパ(摩擦力切り替え機能付き)が開発されました。牽引装置は,回転中心が明らかな構造として門形板ばね式,Zリンク式が開発されました。台車のボルスタレス化は,在来線用においては,主に軽量化,省保守化の観点で行われましたが,こと新幹線に関しては,高速での走行安定性を安定的に確保するためにもボルスタレス化(側受の廃止,ヨーダンパ設置)は必然であったものと思われます。0系DT200台車の車体支持装置をボルスタレス化したDT9022形台車が試作され,試験台での回転試験,小曲線通過試験および925形S2編成260km/h走行試験の結果から,従来台車に比べて高速域での乗り心地は良好であり,ボルスタレス方式台車が高速台車として適用されうる見通しが得られました。
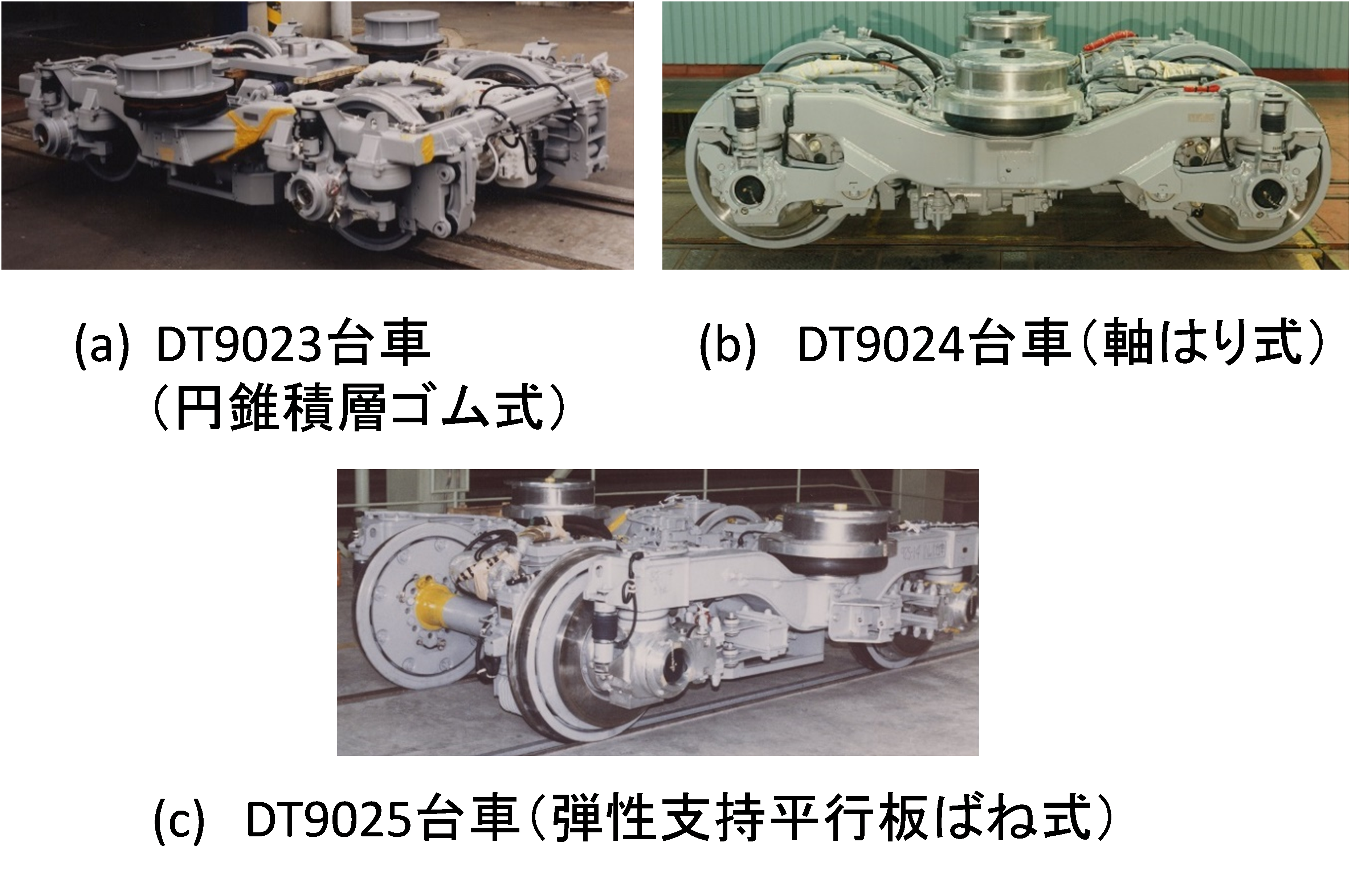
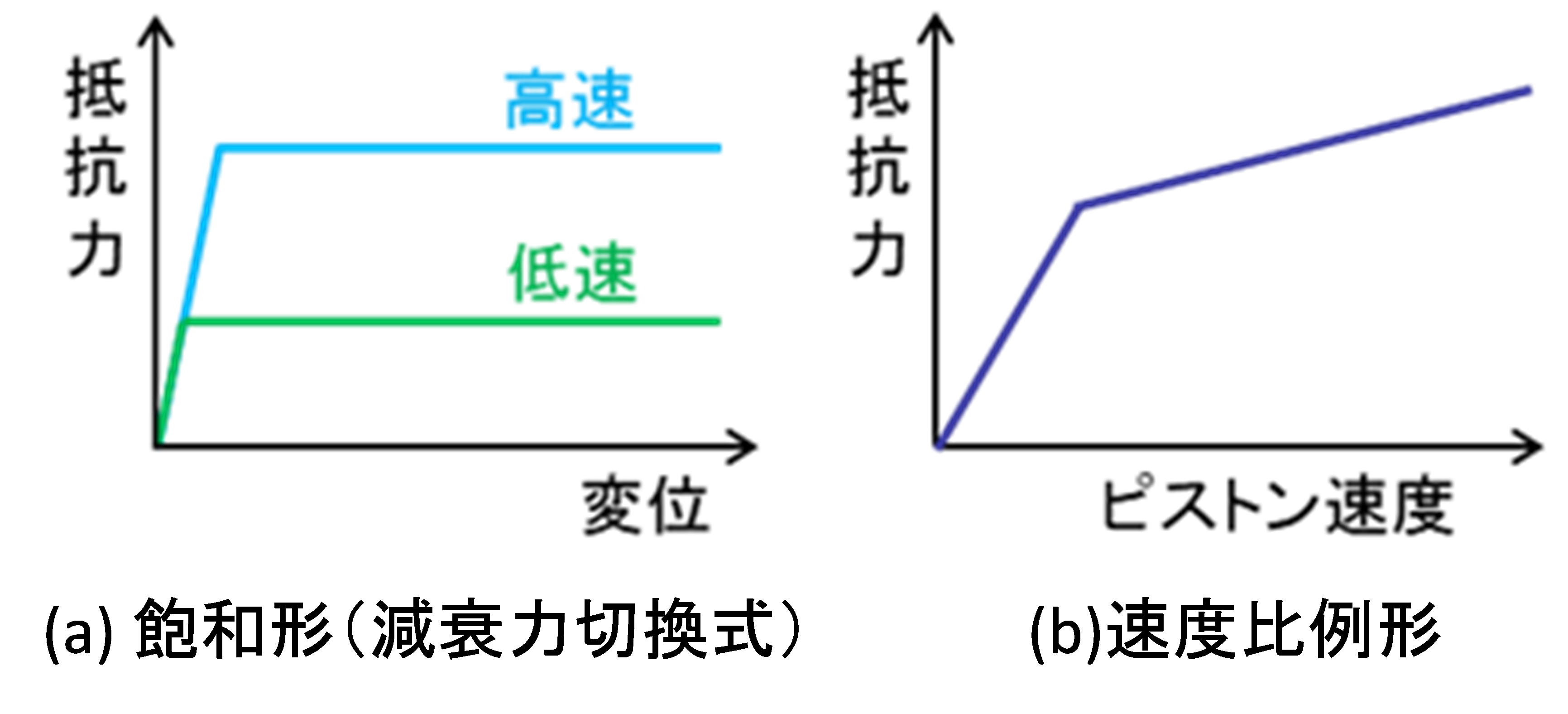
1982年には「スーパーひかり」の開発が具体化し,東海道区間260km/h,山陽区間280km/h以上の高速化を目指して,ボルスタレス化とともに台車全体の軽量化,特にばね下質量については従来の2.3tから1.9t以下への軽量化が目標とされました。1985年には,複数のボルスタレス台車が開発・試作されました。ばね下質量の軽量化,台車全長短縮のため,従来の板ばね式(ISゴム)に代わり,DT9023台車(図1(a))では円錐積層ゴム式,DT9024台車(図1(b))では軸はり式,DT9025台車(図1(c))では弾性支持平行板ばね式の軸箱支持装置が用いられました。ヨーダンパは,減衰力が高速走行時は高く,低速時は低くなる減衰力切換式の飽和形(図2(a))の他に,現在では一般的な速度比例形(図2(b))が用いられました。
牽引装置は,Zリンク式に加えて,明確な回転中心を持たない1本リンク式が用いられました。車軸軸受は玉軸受付円筒ころ軸受に代わり,つば付円筒ころ軸受または円錐ころ軸受(一部グリース潤滑)が用いられました。中央部の中ぐり径を大きくした拡大中ぐり車軸や,ワンウェア車輪,弾性車輪,アルミ合金製歯車箱,端ばりなし台車枠が一部に適用されたほか,アルミ合金製軸箱,フローティングキャリパーブレーキ,横ばり取り付け増圧シリンダが共通して用いられました。東北新幹線における925形S2編成270km/h走行試験において,従来台車に比べて良好な輪重・横圧特性・乗り心地と,ばね下軽量化による輪重変動減少,ヨーダンパによる高速走行安定性および曲線通過性能が確認されました。複数の台車形式の中では,DT9023台車が最も実用化に近いと評価されました。ヨーダンパについては,飽和形と速度比例形による性能差がなかったことから,その後東海道・山陽区間で実施された100系ボルスタレス台車試験では切り替え制御が不要な速度比例式が選択されました。(後編につづく)
車両構造技術研究部長 石毛 真
【研究&開発】車体弾性振動低減のためのアクティブマスダンパの性能向上
1 はじめに
近年の鉄道車両では,さらなる乗り心地向上のために車体の上下弾性振動の低減が求められています。これに対して,著者らは,アクティブマスダンパ(AMD)を用いた多モード制振手法を提案しています。これまでに,可動部質量90kg(総質量210kg),高さ700mmの大型のアクチュエータを活用して原理実証を行い1),実用化を目指して小型の専用デバイスを製作しました2)。そして,鉄道総研所内の車両試験台における加振試験,および営業線を用いた走行試験を実施し,2台のAMDを車両の床上(車室内)に設置し,速度フィードバック制御することで多モード制振が可能であることを示しています2)。しかしながら,従来手法では,制振対象外の1Hz前後の振動の影響を抑えるために,AMDの設置位置近傍の車両中央2点に加えて,車端もしくは台車直上2点の合計4点の加速度を計測して,弾性振動の成分(10Hz前後)を強調した信号を生成する必要があり,加速度測定用センサのケーブルを車体の広い範囲に引き通す必要がありました。
そこで,コントローラの周波数特性を整形できるH∞制御理論を適用し,1Hz前後の振動の影響を抑制したコントローラを設計することで,より少ないセンサで制振効果を得ることを目指しています。本稿では,そのコントローラの性能および,AMDの乗り心地向上効果確認のために実施した,車両試験台における加振試験結果について報告します。
2 アクティブマスダンパ(AMD)の概要
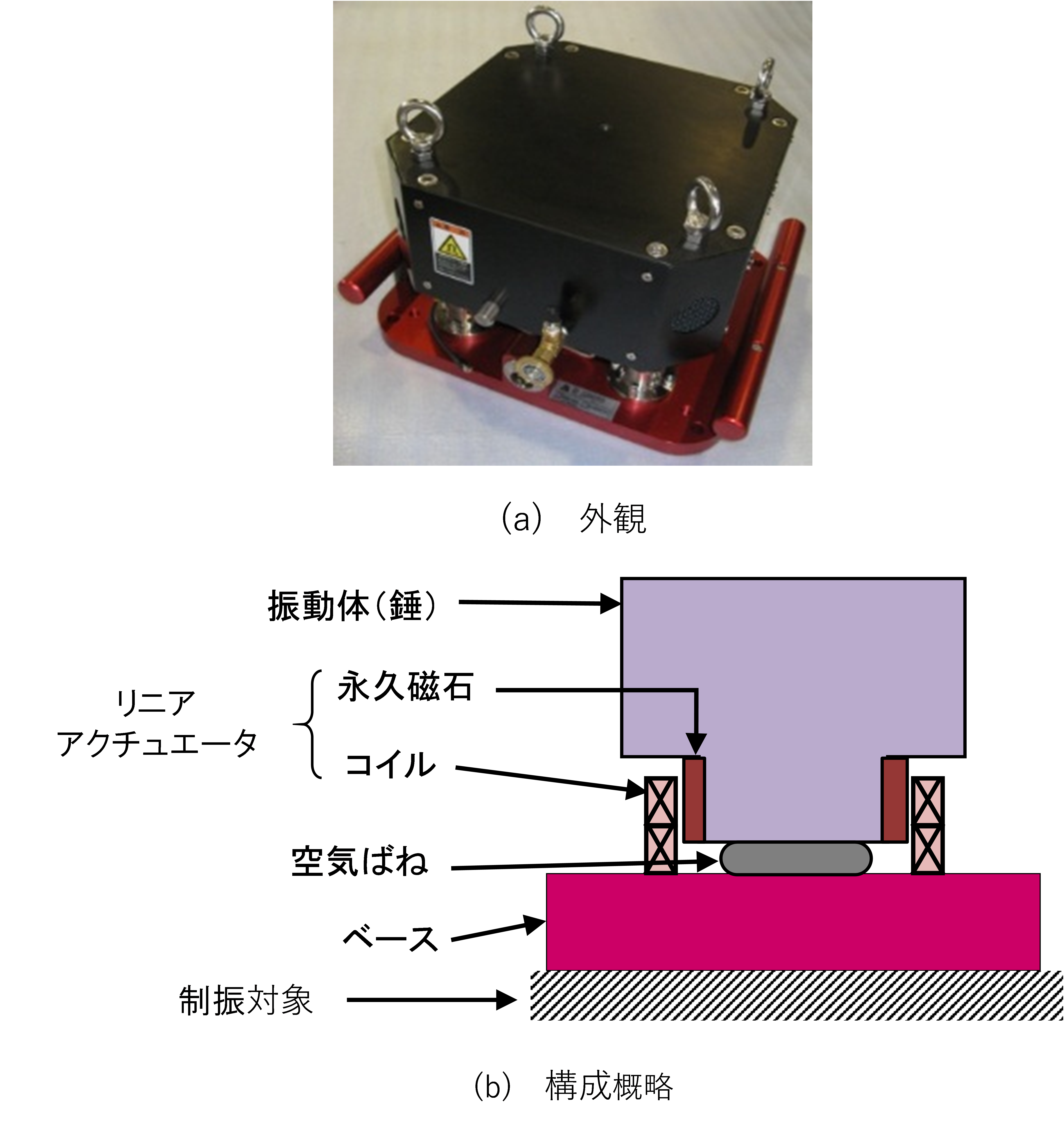
AMDの外観と構成の概略を図1に示します。この装置は,空気ばねで支持された振動体と,永久磁石とコイルで構成されたリニアアクチュエータで構成されており,リニアアクチュエータで上部の振動体を加振することで,その慣性反力を制振対象に加えるものです。そのため,車体床面の振動を抑えるように振動体を駆動することで,床面の振動を低減することができます。AMDの可動部である振動体の質量は58kg,総質量は70kgであり,概ね人間1人分の質量です。今回はこの装置を2台用いるため,合計で140kgの質量増加となります。
3 試験条件
本稿で対象とする供試車両の外観を図2に示します。この車両は鉄道総研の所有する新幹線型試験車両で,近年の新幹線車両と同様に,アルミニウム合金製のダブルスキン構体を有しており,車内には内装パネルや腰掛などを設置しています。
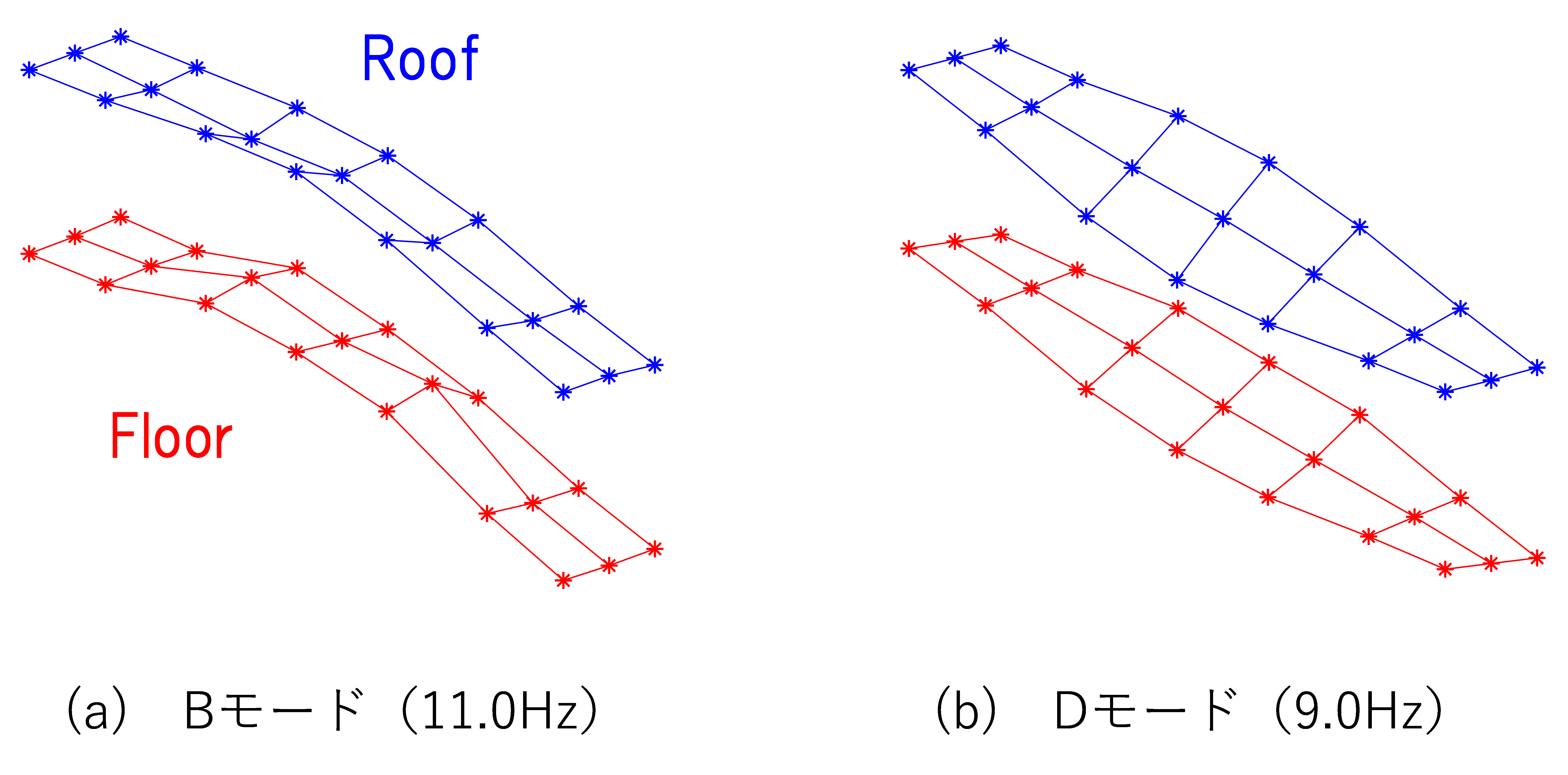
AMDで制振対象とする弾性振動の変形形状(振動モード形状)と固有振動数を図3に示します。ここでは,一般的に「はりの1次曲げ」と呼ばれるBending(以下,B)モードに加えて,車体断面がせん断変形する振動モードであるDiagonal distortion(以下,D)モードの2つの振動モードを対象とします。AMDは,対象とする振動モードの振幅が最大となる位置に設置することで,最大の制振効果を期待することができます。ただし,今回は取り付けの都合から図4に示すように,振幅が最大となる車体中央部からわずかにオフセットした位置に設置しました。
上下方向の加速度測定点を図4に示します。AMDの制御には車体中央部の左右側寄りの測定点f4rとf4lの2点の加速度を使用しました。また,車体床面の乗り心地評価点として,車体を長手(レール)方向に7点,幅(まくら木)方向に3点の21点を設定しました。
AMDの制振性能を確認するために,鉄道総研の車両試験台を用いて加振試験を行いました。加振条件は,実際の走行状態を再現するような位相差(時間差)をもって,各輪軸を加振する実走行模擬加振としました。

4 試験結果
車体床面の上下方向の加速度PSDの結果を図5(a),(b)に示します。この図より,制振対象としている10Hz前後の周波数で振動低減効果が得られていることがわかります。次に,図4に示した車体床面21点の加速度測定点における乗り心地レベル(LT)を求め,制御なしと制御ありの差を求めたものを図5(c)に示します。この図ではタイル状のパターンの個々の領域は各測定点に対応しており,数値が小さいほど(寒色系の色が濃いほど)LTが低減し,乗り心地が向上していることを表しています。この図から,車体床面の広い範囲で乗り心地向上効果が得られていることがわかります。
5 まとめと今後の予定
AMDによる車体弾性振動の多モード制振手法について,従来手法より少ない2点のセンサの信号を用いた制御によって,振動低減効果および乗り心地向上効果が得られることを実証しました。
今回の取り組みにより,車端部もしくは台車直上への加速度センサ設置が不要となり,追加する機器類は車体中央部に集約され,設置性を大きく向上することができました。今後は,営業線における走行試験を行い,乗り心地向上効果を検証する予定です。
参考文献
- 1) 秋山裕喜,富岡隆弘,瀧上唯夫 : 車体弾性振動低減のためのアクティブマスダンパの開発, 鉄道総研報告, Vol.27, No.5, p.17~22, 2013.
- 2) 秋山裕喜,富岡隆弘,瀧上唯夫 : 小型アクティブマスダンパによる車体弾性振動の多モード制振効果, 鉄道総研報告, Vol.27, No.12, p.29~34, 2013.
車両構造技術研究部 車両振動 副主任研究員 秋山 裕喜
【研究&開発】左右振動加速度の実測値を考慮した転覆限界風速評価
1 はじめに
鉄道車両の転覆限界風速を評価する総研詳細式1)では,計算の中で考慮する各条件について転覆に対して最も厳しい状態を想定し,これらの重ね合わせを前提としています。そのため,計算結果が経験的に推定される風速よりも低くなる傾向があり,実態により即した評価が求められています。そこで本稿では,左右振動加速度の実測値を考慮した転覆限界風速の評価方法を検討しましたので,紹介します。
2 総研詳細式における現行の評価方法の考え方
総研詳細式では,転覆に大きな影響を及ぼす作用力として,①横風による空気力,②曲線通過時の超過遠心力,③左右振動慣性力の3力を考慮しています。このうち①については,車体形状,地上構造物形状,車両に対する風向角等に大きく依存することがこれまでの研究により明らかになっており,可能な限り風洞試験により空気力係数を求め,実態に即した評価を行うことが推奨されています。次に,②については,曲線半径,カント,車両の質量,および走行速度が定まれば一意に求められます。一方,③については,車体の左右振動加速度と車体質量との積により求めることができますが,左右振動加速度の値については,車両,軌道,走行速度などの条件により大きく変わりうるため,現行では最高速度走行時に0.98 m/s2となるような走行速度に関する1次式を仮定しています1)。しかし,最近の測定例ではこの仮定を超過する割合は1%未満とごくわずかであることなどが報告されており2),安全側の仮定としては問題ないと考えられるのですが,上述の①および②の2項目と比較して実態との差が大きい可能性が考えられます。そこで,改めて複数の走行線区および車種について実施された左右振動加速度測定結果から,実測データに基づく転覆限界風速の評価方法を検討しました。
3 左右振動加速度の実測データに基づく評価
3.1 実測データ処理方法と転覆限界風速の試算
左右振動加速度の実測結果の一例を,走行速度と左右振動加速度(絶対値)との関係として図1に示します。実測値として示される各点は,100 Hzサンプリングで収録されたデータに対して,2 Hzのローパスフィルタ処理を行うとともに曲線通過時の左右定常加速度の影響を除いた上で,2秒間最大値をプロットしたものです。なお,駅周辺等において50 km/h程度以下の中~低速域で分岐器を通過する際に比較的大きな左右振動加速度が測定されることがあるのですが,著大値の発生箇所や原因が限定的であり,一般的に転覆限界風速を計算する場合に考慮する左右振動加速度としてはこれらの著大値を除外して評価する方が適切であると考えられるため,図1には分岐器通過時のデータを除外した結果を示しています。
図1から,今回の測定条件における左右振動加速度の実測値は,いずれの走行速度においても総研詳細式における現行の仮定(図中赤線)より小さいことが分かります。そこで,これらの実測データを概ね包含する一次式(図中緑線)を「実測ベースの仮定」として,転覆限界風速の計算結果に与える影響を検討しました。その結果を図2に示します。図2から,左右振動加速度として実測ベースの仮定を適用することで,現行の仮定を適用した場合と比較して転覆限界風速が最大で2 ~ 3 m/s程度高く計算されるケースがあることが分かりました。なお,ここで示した転覆限界風速は一般的な通勤型車両を想定した仮想条件による試算結果であり,車両や軌道の条件によって数値は変わることに注意が必要です。
3.2 転覆限界風速の確率的解釈
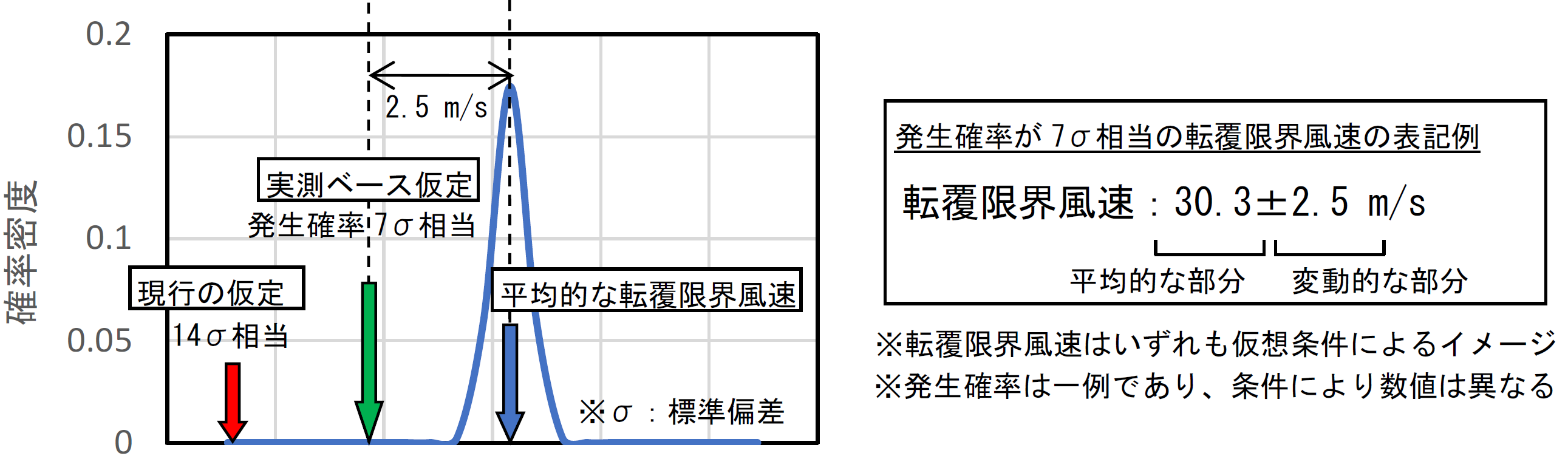
総研詳細式のような静的解析の前提では,左右振動加速度と転覆限界風速との間にほぼ線形の関係があるため,左右振動加速度の発生頻度を分析することにより転覆限界風速の確率的な解釈が可能となります。例えば,図2に示した走行速度120 km/hにおける転覆限界風速について,左右振動加速度の発生確率が正規分布に従うと仮定した場合の転覆限界風速の確率分布は図3のようになります。この場合,実測ベースの仮定に基づく転覆限界風速の計算結果は,正規分布における7σ程度の発生確率に相当し(σは標準偏差),非常に低い確率で発生する事象を想定していることが分かります。さらに現行の仮定に基づく場合には,その確率はいっそう低くなり,冒頭で述べたように転覆限界風速の計算結果が経験的に推定される風速よりも低くなる傾向があるのは,「非常に稀にしか発生しない条件を想定していたためである」と解釈できます。
また,確率的に解釈する場合の転覆限界風速は,現行のように一つの数値で表されるものではなく,確率分布に対応したばらつきの幅を持つ形で表記することができます。例えば図3に示した実測ベースの仮定に基づく例では,「平均的には30.3 m/sであるが,発生確率として7σ相当のばらつきを考慮すると± 2.5 m/s程度の幅を持つ」と表すことができます。現状では下限値である「30.3 - 2.5 m/s」すなわち「27.8 m/s」という一つの数値だけで表しているため,平均的(確定要素的)な部分と変動的(確率要素的)な部分との区別ができず,計算結果の持つ意味を実態(現象)に即した形で把握することができませんでしたが,上記のような表記方法を採ればこれらの区別が明確になり,想定する発生確率(安全余裕)に対応した形での転覆限界風速の表記が可能になると考えられます。なお,ここで示した発生確率および転覆限界風速も一例であり,条件によって数値は変わることに注意が必要です。
4 おわりに
総研詳細式を用いて実態により即した転覆限界風速を評価するために,左右振動加速度の実測値を考慮した転覆限界風速の評価方法を紹介しました。実測ベースの仮定を用いることにより,実態により即した転覆限界風速の評価が可能になるとともに,左右振動加速度の発生頻度を分析して転覆限界風速を確率的に解釈することにより,想定する発生確率に応じた安全余裕を適切に見込むことができ,走行安全性と輸送安定性のバランスに配慮した運転規制風速の設定が可能になると考えられます。ただし,日本の鉄道ではこれまで決定論的に安全性を議論してきた経緯もあり,確率論的な安全性の議論は未成熟で研究開発の余地が残されています。今後は,他の技術分野における安全性評価手法も参考にしながら,車両,気象,空力の各分野の研究者で連携して,評価手法の確立と実務への応用を図りたいと考えています。
実車による左右振動加速度測定試験に関して,西日本旅客鉄道株式会社 車両部車両設計室および安全推進部の関係者の皆様には,多大なるご理解とご協力を賜りました。ここに改めて深謝の意を表します。
参考文献
- 1) 日比野有,石田弘明:車両の転覆限界風速に関する静的解析法,鉄道総研報告,Vol.17,No.4,pp.39-44,2003
- 2) 大山安紀子,鈴木貞治,三須弥生,安田陽一,堀岡健司:車両の風に対する転覆耐力評価のための左右振動加速度の検証,第22回鉄道技術連合シンポジウム(J-RAIL2015),2015
鉄道力学研究部 車両力学 上席研究員GL 日比野 有
【解説】旅客鉄道の省エネルギーと消費原単位
1 はじめに
まだ省エネという言葉が生まれる以前の蒸気機関車の時代から,鉄道事業者は動力費の節減に取り組んできました。日本国有鉄道百年史1)には「運転用石炭費の節減に多大な努力が払われた。」とあり,大正9年度から昭和11年度の間に蒸気機関車走行1km当たりの石炭消費量が約4分の3になったことが記されています。戦後の国鉄の動力近代化(電化,ディーゼル化)は,動力変換効率の向上という大きな効果を得ました。その中でわが国は電車中心の時代になりましたが,1973年のオイルショックによる社会全体の省エネの高まりは抵抗制御からチョッパ制御への移行の追い風になり,現在はインバータ制御が主流になっています。最近は地球温暖化の原因とされるCO2排出低減が強く叫ばれ,省エネの取り組みの推進力になっています。
今回は,国土交通省のホームページに掲載されているエネルギー消費原単位という値を用いて,従来と異なる切り口で鉄道車両のエネルギー消費について考察します。
2 エネルギー原単位についての概要
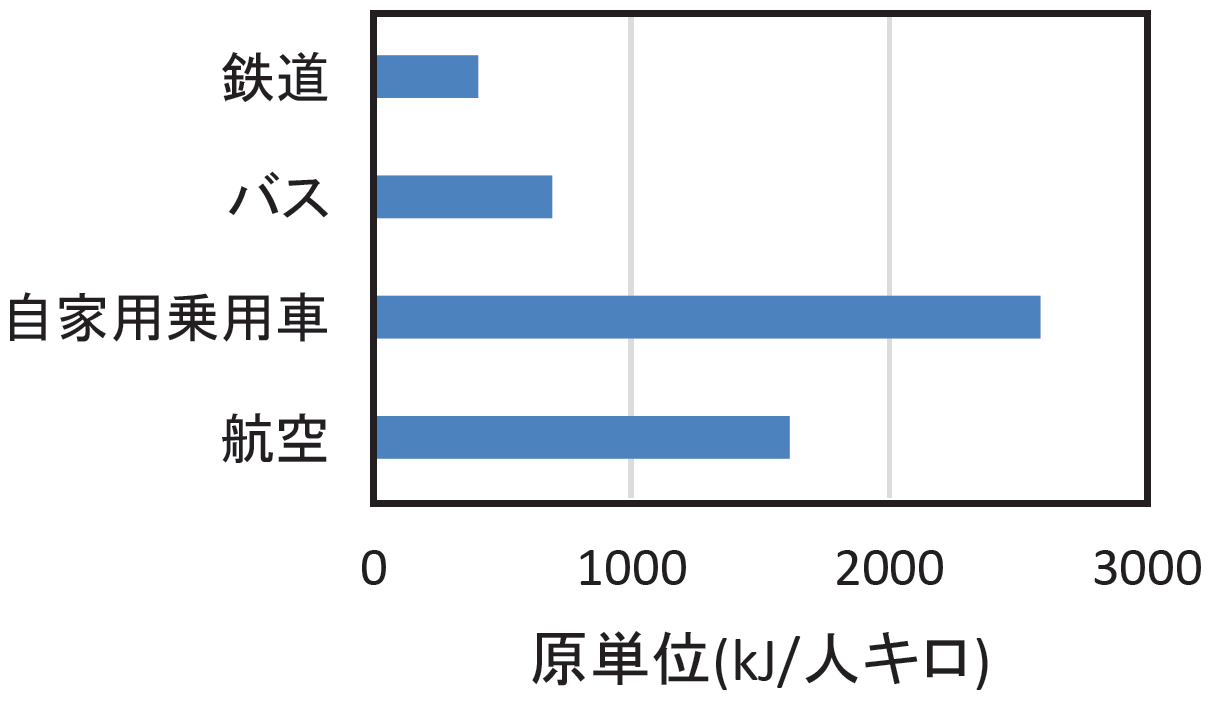
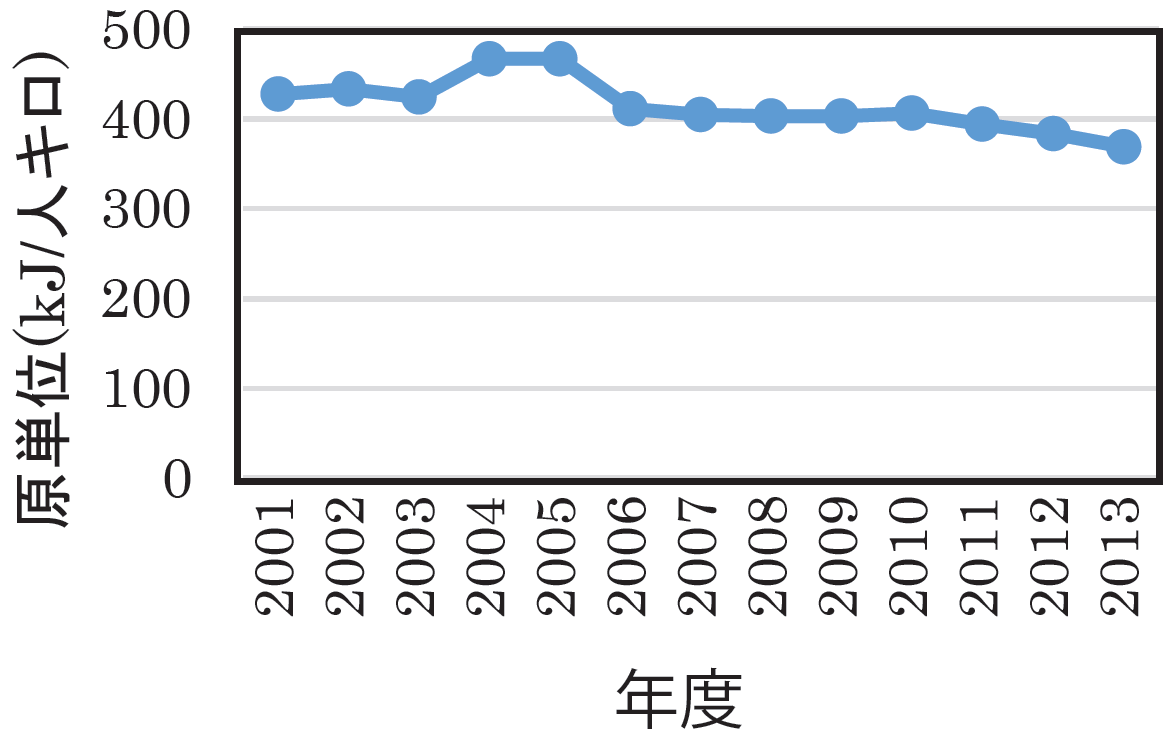
この原単位は1人を1km輸送する際に消費するエネルギーで,消費エネルギーを輸送人キロで除して求めた値です。省のホームページでは,鉄道,バス,自家用自動車,航空のそれぞれの原単位が2013年度分まで(自家用自動車は2009年度分まで)掲載されています2)。やや古くなりますが、4つの輸送機関について比較できる2009年度のデータ(旅客)をグラフ化して図1に示します。エネルギー消費の面で鉄道が優れていることが改めて理解できます。また,鉄道の原単位の推移を図2に示します。全体的にみると徐々に改善しています。
3 事業者毎の原単位の分布
省のホームページの鉄道統計年報3)には事業者毎に輸送人キロ,運転用消費電力量,軽油使用量が記載されており,事業者毎の原単位を計算することができます。今回は全国174事業者の分布の解析を試みました。原単位は輸送密度(輸送人キロを営業キロで割った値)と相関すると思われるので,これと対比しました(図3)。現時点で得られる最新の2016年度の数字です。
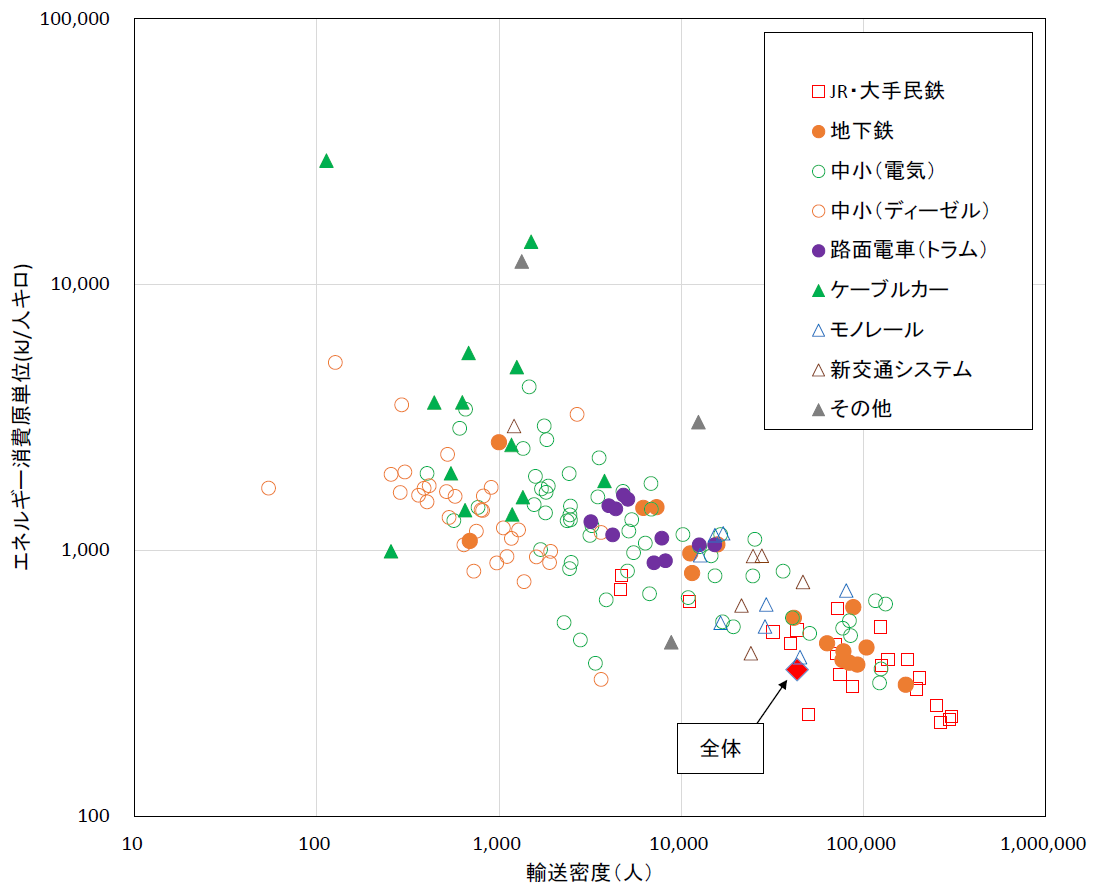
この図から以下のことがわかります。
- 輸送密度が高い事業者が概ね原単位が小さいという常識的な傾向を確認できました。
- 9つのカテゴリーを比べると,原単位の小さい方から
1「JR・大手民鉄」,「地下鉄」
2「モノレール」,「新交通システム」
3「中小(ディーゼル)」,「路面電車」
4「ケーブルカー」
の順になりました。 - 「中小(電気)」の原単位は広い範囲に分布しました。これは,大都市圏の高い輸送密度の事業者と地方の事業者を同じカテゴリーにまとめたためと考えられます。
- 「地下鉄」は「JR・大手民鉄」と遜色のない原単位でした。トンネル区間の空気抵抗により原単位が大きくなると想定していましたが,運転速度が比較的低いためと考えています。
- 「モノレール」,「新交通システム」は鉄車輪・鉄レールのシステムより走行抵抗が大きいので原単位が高くなると想定しましたが,そのような傾向はみられませんでした。乗車率などの検討が必要と考えています。
- 「路面電車(トラム)」は停車頻度が高いので「中小(電気)」より原単位が大きくなると想定していましたが,同程度の輸送密度で比べると差がみられませんでした。これは運転速度が低いためと考えています。
- 「中小(電気)」と「中小(ディーゼル)」を比べると,ディーゼルは輸送密度が約5000人以下の事業者で使われ,この範囲では電気運転より原単位が小さい傾向です。これはディーゼル運転では車両が小さく軽い(乗車率は高くなる)ことが要因と推定しています。
- 174事業者全体のエネルギーを輸送人キロで除して求めた「全体」の原単位は356(kJ/人キロ)でした。図2の2013年度の値より小さくなっています。また,最も原単位が小さい事業者では226(kJ/人キロ)でした。
4 おわりに
最初に述べたように,省エネは時代ごとの背景,要請を受けて常に追求されてきました。近年,世界的に鉄道の省エネ性が再評価され,高速鉄道など多くのプロジェクトが進められています。今後もサステナブルな輸送機関としての魅力を高めるために努力が続けられると考えます。
注)本稿は文献4 を一部割愛し,データをアップデートして作成しました。
参考文献
- 1) 日本国有鉄道:日本国有鉄道百年史第8 巻,p.556,1971
- 2) 交通関連統計資料集(参照日:2019 年5 月17 日)
- 3) 鉄道統計年報(参照日:2019 年5 月17 日)
- 4) 秦広:鉄道のエネルギー消費原単位からみた車両省エネ技術の今後のあり方,鉄道総研報告,Vol.32, No.8, 2018
車両制御技術研究部 主管研究員 秦 広