車両ニュースレター
2021年7月号
[クローズアップ]ポストコロナに向けた鉄道技術の研究開発
新型コロナウイルス感染症の世界的な感染拡大がはじまってはや1年半が経過しようとしています。本稿執筆時点ではコロナ禍収束のきざしはまだ見えない状況ではありますが,日本国内でもワクチン接種率が少しずつ高まりつつあり,コロナ禍収束への期待もまた高まっているところです。そこで本稿では,ポストコロナ時代における鉄道技術の研究開発の方向性について,私なりの考え方を述べてみたいと思います。
ポストコロナに向け,コロナ禍で大きなダメージを受けた社会をどのように復興するのか,国内外で様々な議論が行われてきましたが,「より良い世界への復興」というのが重要なキーワードとなっています。特に,EU(欧州連合)が提唱する「グリーンリカバリー」は,コロナ禍を契機に脱炭素化を加速させ,自然災害に対する強靭化を図り,生物多様性を保全する方向に復興することを目指すものです。ここで注目すべきは鉄道の位置づけです。EUでは2021年を欧州鉄道年と位置づけ,グリーンリカバリーの有力なメニューの一つが鉄道輸送の強化であることを広くアピールしています。具体的には,2030年までに高速鉄道の輸送量を2倍,鉄道貨物輸送を1.5倍にするという目標が設定されています。
日本の場合,EU域内と比べて旅客輸送における鉄道利用のシェアがもともと高いことに加え,今後国内の人口減少が急速に進むことから,EUのような野心的目標を掲げにくいところではあります。しかし,交通弱者を含むすべての人に対して地球環境に優しく,なおかつ使いやすい公共交通を提供すると同時に,物流の脱炭素化を進めるうえで,鉄道が果たすべき役割は非常に大きいと考えます。ただし,これは単に「今の鉄道システムを将来にわたって存続させる」という意味ではなく,「ポストコロナに向けて鉄道技術の変革を加速させる」という意味であることは言うまでもありません。
では,ポストコロナに向けて鉄道に関わるどのような研究開発が必要なのでしょうか。ここでは三点を挙げたいと思います(図1)。
一点目は,「よりスマートな鉄道の実現」です。これは,鉄道運行に必要なインフラ設備・人的リソースを削減することにより,より高い信頼性で柔軟な鉄道運行を実現することによって利便性を向上すると同時に,運行コストの低減を図り鉄道事業の持続可能性を高め,公共交通機関の維持発展に寄与するための取り組みです。従前より,人口減に加えてリモートワーク等の普及により,国内移動需要の縮減が懸念されていましたが,旺盛なインバウンド需要や活発な経済活動等により,鉄道利用は増加し続けていました。しかし,コロナ禍に起因する鉄道旅客輸送の急減は,懸念されていた移動需要縮減が実際に起こり得ることを改めて目の前に突き付ける結果となりました。鉄道総研でもスマートな鉄道の実現に向けた研究開発にはかねてより取り組んでおり,特にデジタル技術の活用によって省力化,省人化,省保守化,省設備化を実現するための研究開発に注力してきたところですが,コロナ禍により,これらをいかに早く実現するのか,そのスピード感が非常に重要となっています。
二点目は,「ビヨンド・グリーンを実現する鉄道」に向けた取り組みです。ビヨンド・グリーンを実現する鉄道というのは,単に鉄道の脱炭素化を進めるのみならず,積極的な循環型社会への適合を図ると同時に,気候温暖化により激甚化・頻発化する気象災害に対する鉄道の強靭化をはじめとする鉄道のさらなる安全性向上を図ることにより,お客様や荷主様に安心して利用・選択される鉄道を目指す,という意味です。もちろん,脱炭素化,循環型社会への適合,安全性向上はそれぞれが非常に難しい技術課題を含んでおり,一朝一夕に実現できるものではありません。しかし,鉄道はこれらの課題を高い次元で実現できるポテンシャルを有しており,社会的な期待も大きいと思われます。
三点目は,「Well-beingを実現するための鉄道」に向けた取り組みです。Well-beingとはやりがいや生きがいのある状態を意味する言葉です。もともと日本の鉄道事業者には,駅や沿線開発を通じて沿線価値を向上し,鉄道を通じて人々により快適な暮らしを提供することに努めてきた歴史があります。しかしその一方で,沿線人口の少ない路線では鉄道を維持すること自体が困難となっているという現実もあります。大都市圏,地方圏を問わず,公共交通機関を中心とする街づくりは住民のWell-beingの実現には欠かせない施策であり,また世界の潮流でもあります。そのなかで鉄道がどのように貢献していくのか,確固たる正解がない課題であるからこそ,様々な議論や試行錯誤を重ねながらその実現に向けて取り組んでいくことが重要だと思います。
現在,鉄道総研では基本計画RESEARCH 2025において,研究開発の目標を「安全性の向上」「低コスト化」「環境との調和」「利便性の向上」の4つを設定し,その実現に向けて研究開発を進めています。RESEARCH 2025はコロナ禍が起こる前に策定したものですが,ここで挙げた3つの方向性をおおむね包含するものと考えています。ただし,現在の社会状況を踏まえると,研究開発の速度を加速させなければなりません。そのためにも,読者諸氏のご指導,ご協力を是非お願いします。

企画室 室長 池田 充
【研究&開発】車体傾斜車両向けの地上子に依存しない走行位置特定手法
1 はじめに
車体傾斜車両は車体を曲線の内側に傾けることで乗客が感じる遠心力を緩和し,曲線を高速に通過することを可能にしています。一方で,実際の曲線の位置に合わせて車体を傾けなければ,乗り心地の低下や乗り物酔いの原因となります。そのため,車両に記憶させた曲線データと車両が特定した走行位置を照合し,適切な走行位置で車体を傾ける制御を行っています。このときに必要となる走行位置特定技術について紹介します。
2 地上子を利用した走行位置特定手法の課題
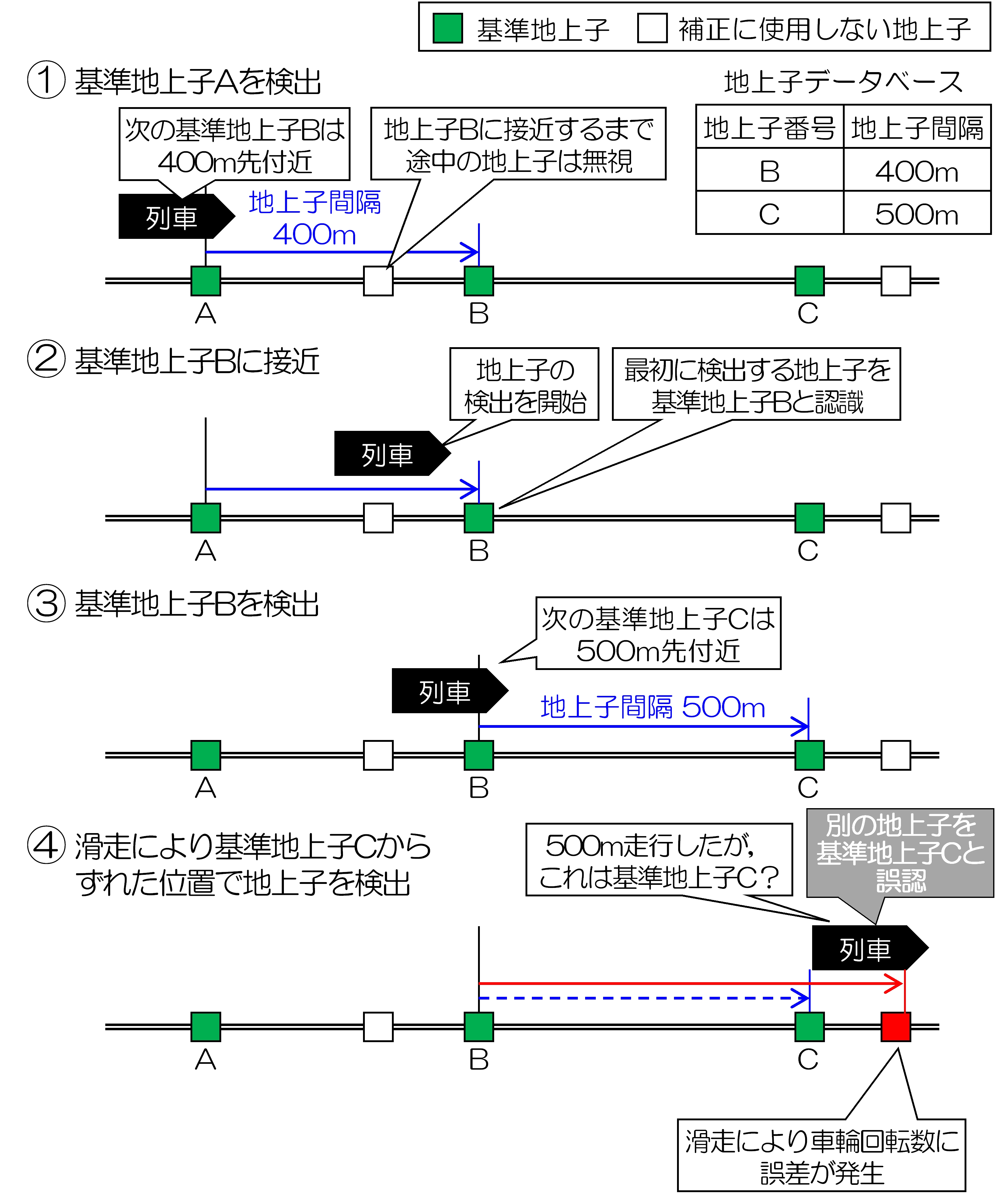
通常,鉄道車両は車輪の回転数の積算による移動距離を走行位置として用います。しかし,走行中に生じる滑走等による誤差の影響を受けるため,路線全体にわたって精度よく走行位置を特定することはできません。このため,在来線の多くの車体傾斜車両では自動列車停止装置(ATS)などの地上子を検出し,あらかじめデータベースに登録された地上子の設置位置を参照して位置を補正することで,高精度に走行位置を特定しています。一方で,地上子の移設や増設が行われる場合に地上子のデータベースを適切に更新できなければ,その付近で精度が低下する,または補正に用いる地上子を見失う可能性があります(図1)。大きな滑走が発生した場合についても補正用の地上子を検出できない場合や,別の地上子を補正用の地上子として認識する場合があります。これは,車輪回転数から計算する移動距離が滑走により実際の移動距離よりも短くなり,補正用の地上子が現れる地点に到達したと認識した時には,すでにその地上子を通過していることなどが原因です。また,複数の番線がある駅では,それぞれの番線で異なる位置に地上子が設置される場合があるほか,駅構内には他の場所と比較して多数の地上子が設置されているため,近接して設置された地上子を補正用の地上子として誤認識してしまう事例もあります。
このように走行位置を確実に特定するためには,路線全体で数多く設置されている地上子の中から適切な補正用地上子を選び出し,実際の位置が反映されるようにデータベースを管理することが必要ですが,非常に負担が大きい作業です。そこで,データ管理の負担を軽減できる地上子に依存しない走行位置特定手法を開発しました。
3 線路曲率を利用する走行位置の特定手法
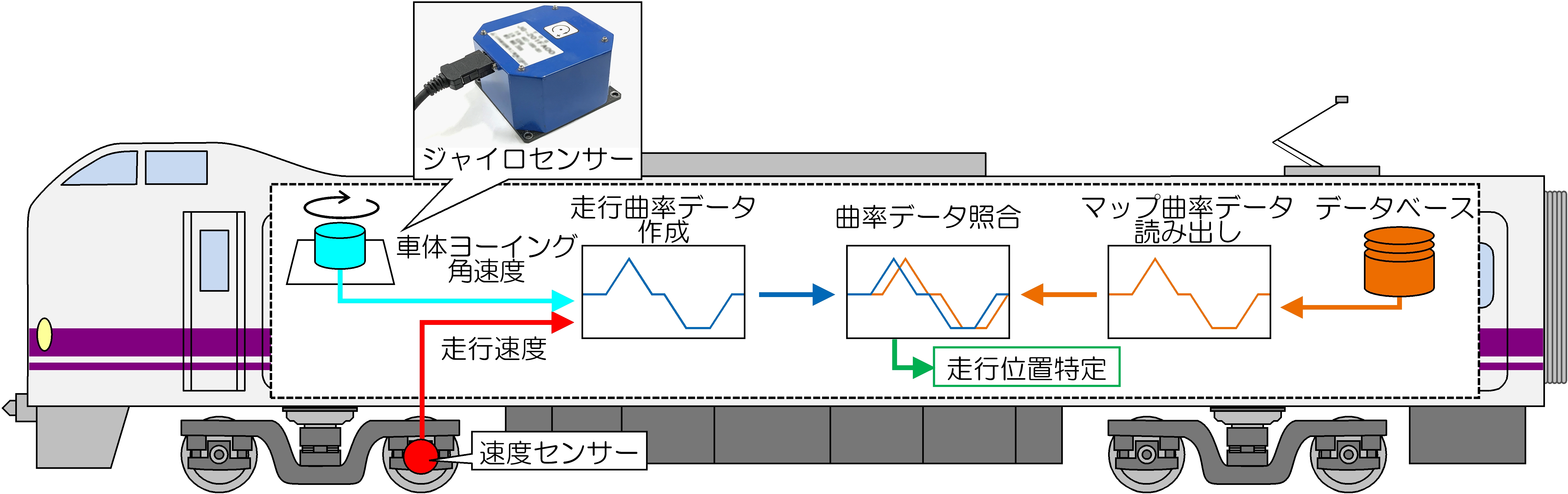
開発した走行位置特定手法では,「線路曲率」を利用します。「線路曲率」とは曲線半径の逆数に相当し,台形状の線図として線路図に描かれている線路線形を表現する値です。走行中に車上で観測する車体の鉛直軸回りの回転運動に対応する車体ヨーイング角速度と走行速度から計算でき,ATS地上子とは異なり走行路線全体にわたって連続的に得ることができます。事前の走行により取得した曲率(マップ曲率データ)を車上のデータベースに登録し,走行中に車上で観測して得られる走行曲率と比較することで一致する線路線形を探し出し,走行位置を特定します。
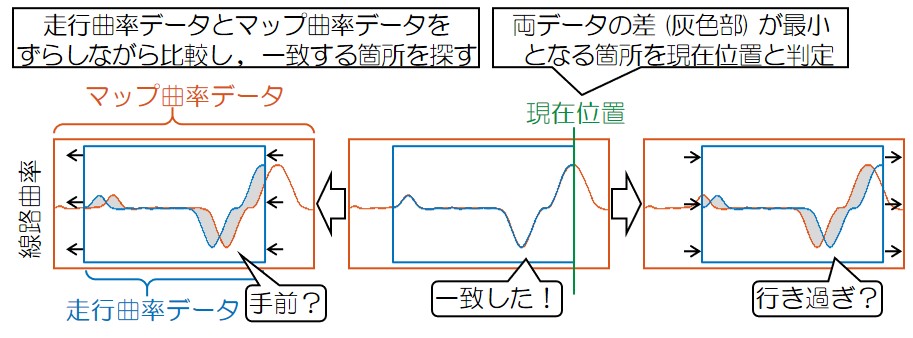
図2は線路曲率を利用する走行位置特定システムの構成を表しています。走行中は車上で観測したデータから線路曲率を算出し,走行曲率データを作成します。これと同時に事前に車上の装置に登録してあるデータベースから現在地周辺の曲率データを読み出し,図3のように走行曲率データをずらしながらデータベースの曲率に重ねることで一致する地点を探します。一致する地点が見つかれば,その地点が現在位置であることがわかります。
線路曲率を用いる走行位置特定手法を実用化するために開発した技術を紹介します。
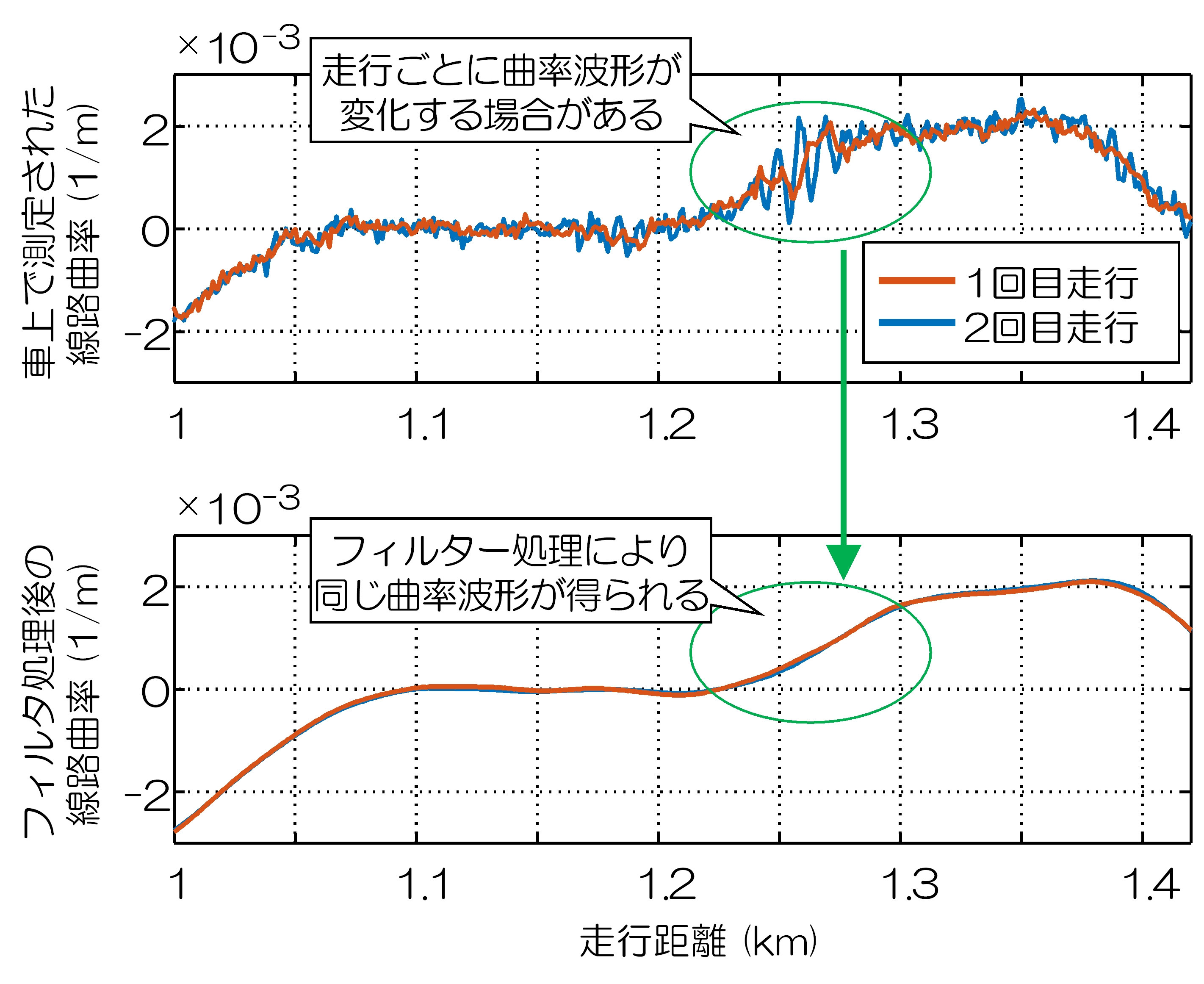
▶曲率波形の変化
走行中の車両で測定する線路曲率は,走行速度や車両の動揺,軌道変位などにより変化し,走行位置の特定精度にも影響します。そこで,路線形状の本来の特徴を残したまま不要な成分を除去するフィルターを開発し,測定する線路曲率波形に対してフィルター処理を行うことにしました(図4)。これにより,走行条件や経年によらず一定の線路曲率波形が得られ,車両に搭載するデータの更新が長期間にわたって不要となりました。
▶線路曲率の変化が小さい場合
直線区間のように線路曲率の変化が小さい区間では線路曲率が類似する箇所が複数存在するため,類似する曲率の位置を現在位置であると認識してしまうことがあります。そこで,長い直線区間に入ったと判断した場合は線路曲率照合による位置補正を行わないようにしました。この区間では一時的に車輪回転数に基づく移動距離を採用し,直前まで線路曲率を利用して特定していた正確な位置からの移動距離により位置を特定します。
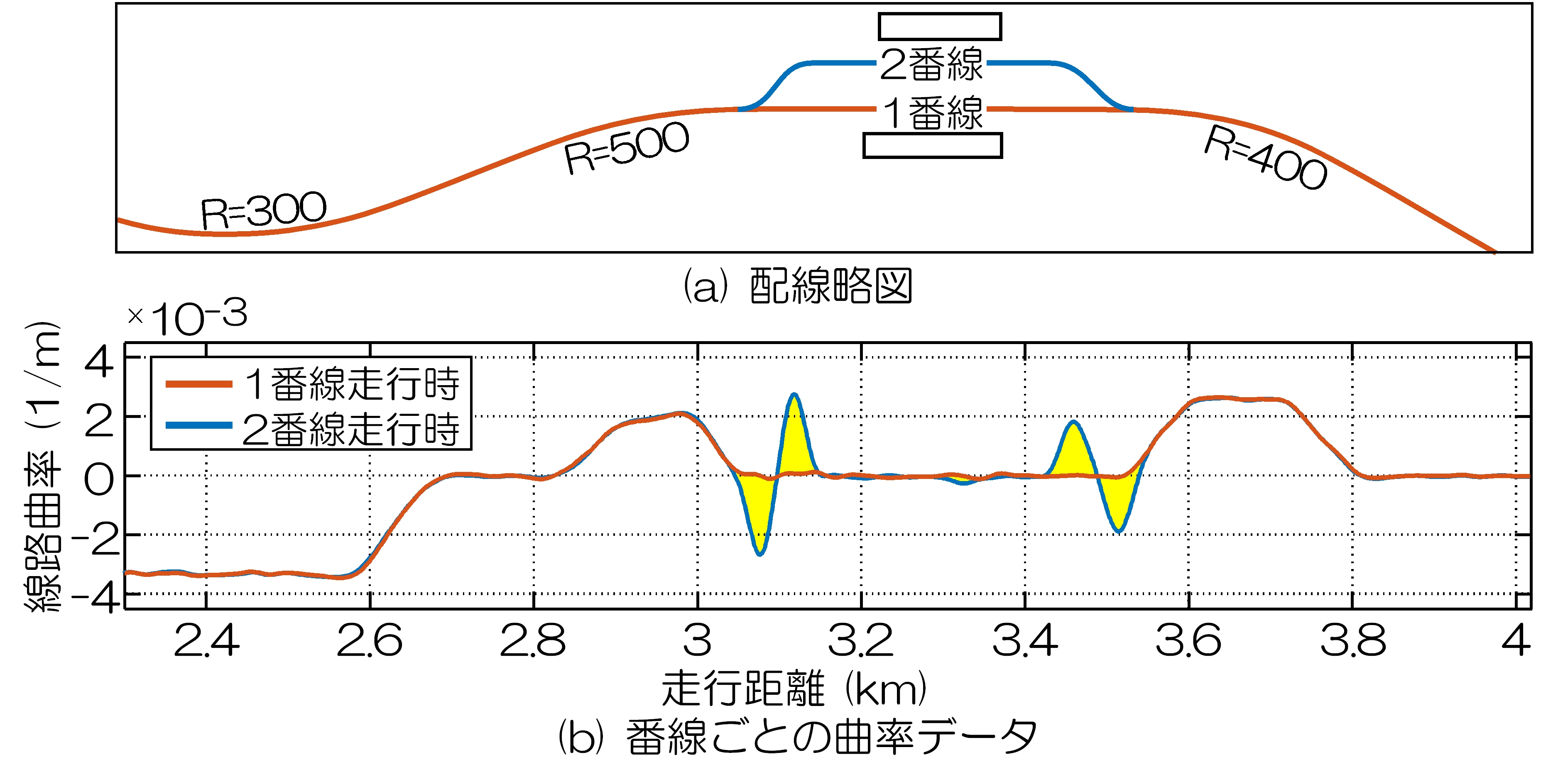
▶番線の違いによる影響
同じ進行方向に複数の番線がある駅(図5(a))において,車上のデータベースに登録したマップ曲率データと異なる番線に進入した場合に,曲率が類似する別の場所を現在の走行位置と誤判定する可能性があります。これを防ぐためには,マップ曲率データと異なる進路に進入したことを検出する仕組みが必要です。そこで,マップ曲率データと走行曲率データを比較し,曲率の差(図5(b)の黄色の面積)が一定値を上回ったときにマップ曲率データと異なる番線に進入したと判断するようにしました。異なる番線に進入後は,車輪回転数に基づき位置を特定し,再びマップ曲率データと曲率が一致する曲線が現れると線路曲率照合による位置補正結果を採用します。
▶データ管理方法
地上子による走行位置特定手法では,膨大な数の地上子から適切な補正用の地上子を選定し,曲線との位置関係を整理した上でデータベースに登録する必要があります。一方,線路曲率による手法では,走行した際に車上で測定する結果から路線全体にわたっての線路曲率を計算でき,車上のデータベースに登録するマップ曲率データを作成できます。また,走行曲率データ自体が曲線の位置と形状を表しており,走行位置の特定だけでなく,車体傾斜角度の制御にも利用できます。
4 性能の評価と今後
性能評価のため試験車両に本システムを搭載し走行試験を実施しました。その結果,検出誤差±2mの精度で自車位置を特定できることを確認しました。また,滑走が発生した場合でも速やかに認識している位置を補正し,複数の番線がある駅ではデータベースどおりの走行か,異なる番線に進入した場合かを判別して走行位置の特定を続けることができました。走行試験では傾斜制御性能を向上させた車体傾斜制御機能との連携の確認も行い,走行位置特定精度が向上することと合わせて乗り心地が向上することを確認しています。より快適な車体傾斜車両の実現と,傾斜制御用の曲線データ管理作業負担の軽減を目指し,実用化に向けての取り組みを進めてまいります。正確な速度の取得方法などの周辺技術も含めて,提案手法の実用化に向けた研究を引き続き進めています。
参考文献
原田康平,真木康隆,石栗航太郎,風戸昭人:曲線中の走行位置にあわせた車体傾斜で乗り心地を向上する,RRR,Vol.77,No.5,pp.16-19, 2020
車両構造技術研究部 走り装置 副主任研究員 石栗 航太郎
【研究&開発】在来線車両の地震時走行安全性を向上する
1 はじめに
2004年に発生した新潟県中越地震において,営業走行中の新幹線列車が高速走行時に脱線して以降,新幹線を対象に地震時走行安全性向上に関する技術開発が行われ営業線に展開されてきました。在来線についても,特に大都市圏においてはその輸送量の大きさから著大地震が発生した際の被害も大きくなる可能性があり,地震時走行安全性への関心が近年高まっています。
在来線では新幹線ほど開発コストを掛けることができません。そこで,在来線の軌道や車両で用いられている既存技術を活用して,地震時走行安全性を向上する研究について紹介します。
2 地震時走行安全性向上の研究手法
地震のような異常時における走行安全性に関して,実車ベースで走行試験を実施することはできません。そこで,主にシミュレーションを用いて走行安全性の検討を行い,大型振動試験装置を用いた実物大の加振実験により,空気ばねなどの車両部品の地震時の特性を把握したり,シミュレーションの妥当性を検証したりしています。
3 在来線用脱線防止ガードを用いた地震対策
在来線における脱線対策として脱線防止ガードがあり,急曲線部や橋りょう部に設置されています。一部の鉄道事業者においては,この脱線防止ガードを地震対策として,万が一脱線が生じた際に被害が大きくなると想定される箇所に設置しています1)。地震時においては,車両が進行左右のどちらにも脱線する可能性があるため,地震対策として脱線防止ガードを設置する際には,左右両方のレールに脱線防止ガードを設置します。
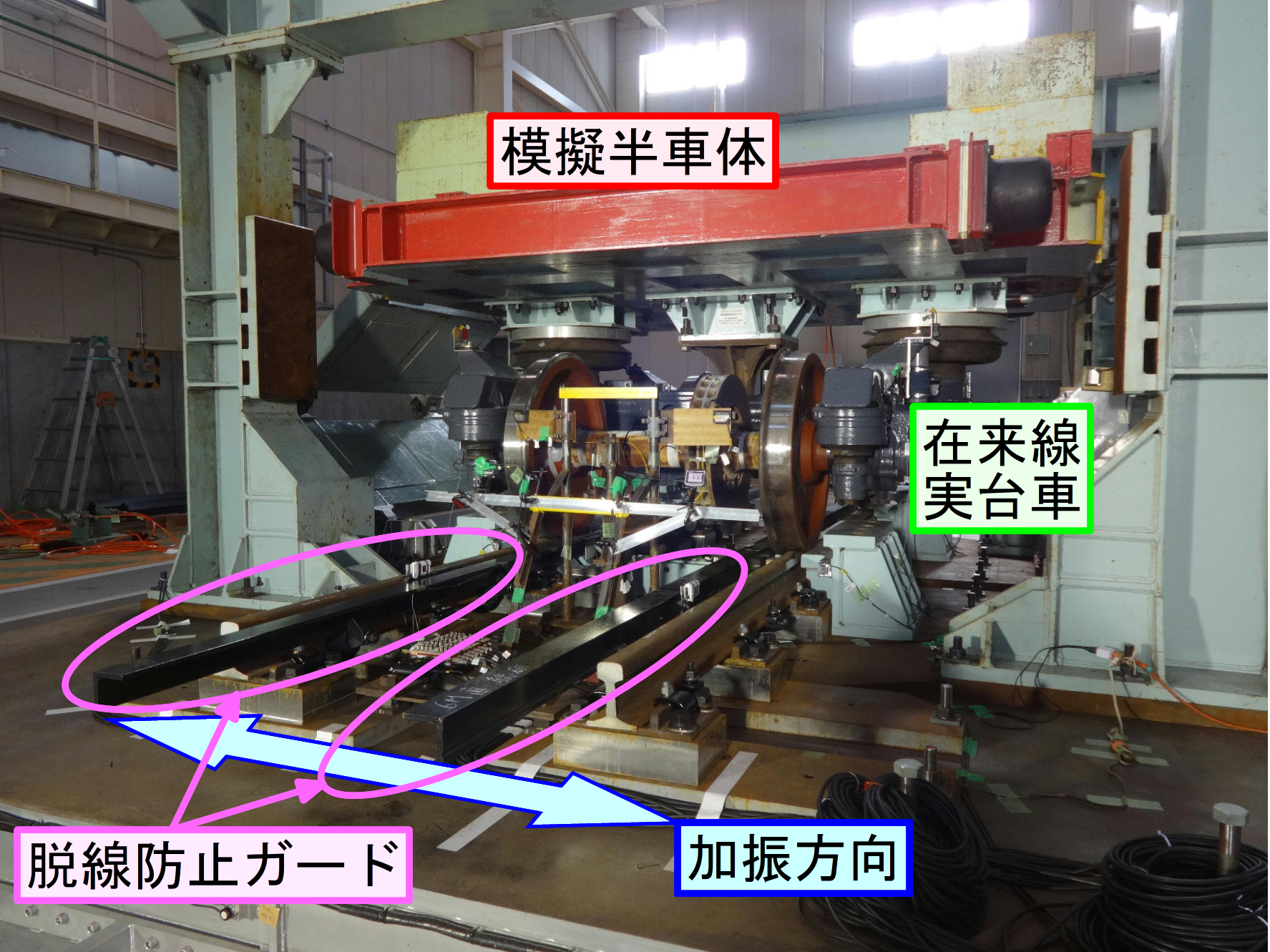
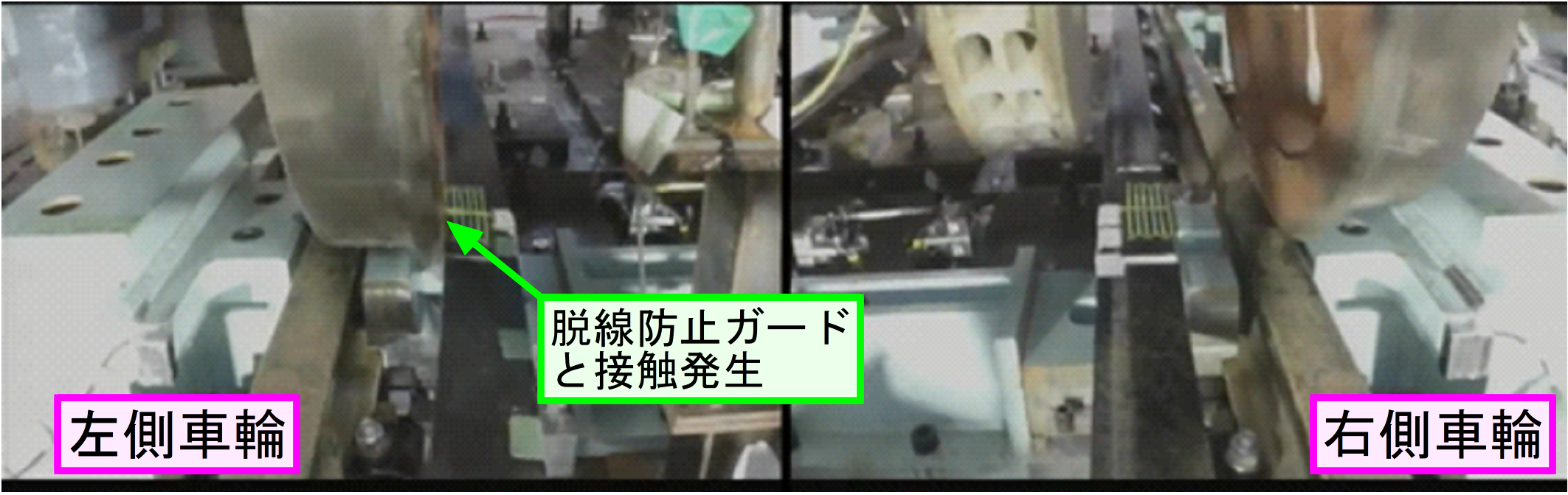
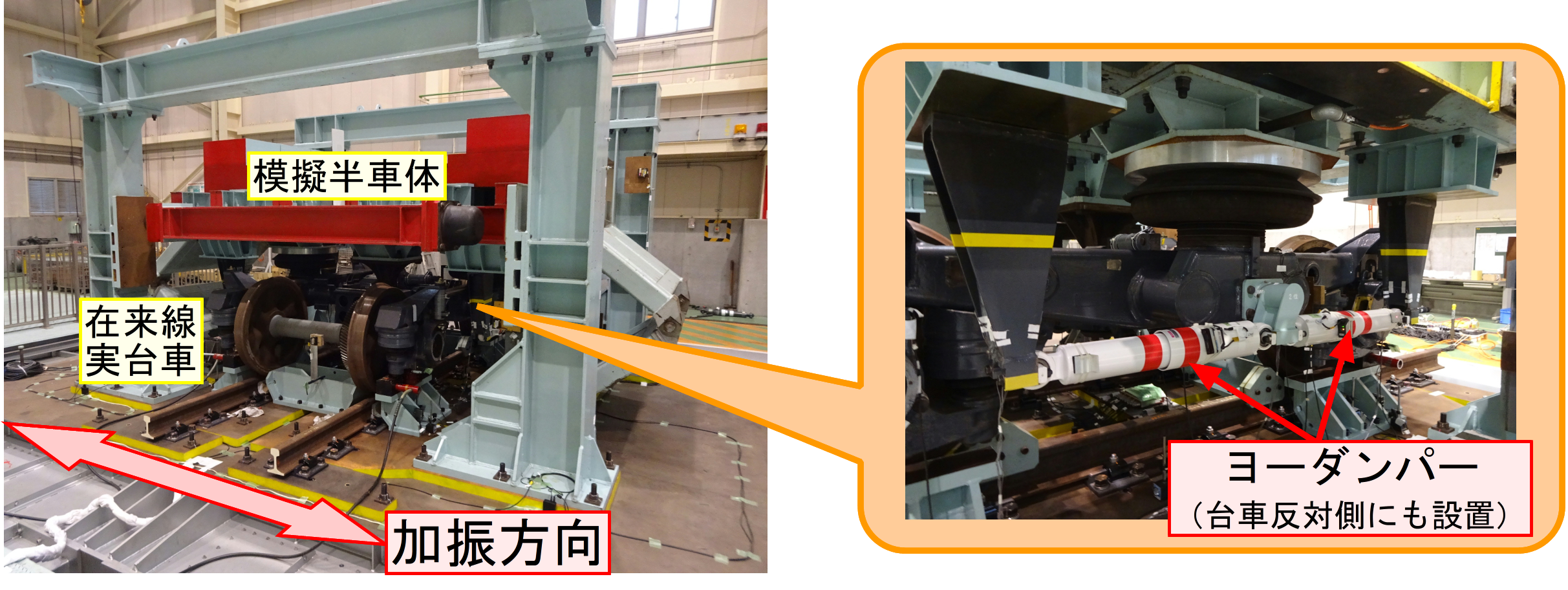
車両運動シミュレーションを実施するにあたり,地震時のように車輪が激しく接触したときの脱線防止ガードの変形特性を把握するため,大型振動試験装置上に脱線防止ガード付きの軌道を設置し,実台車加振実験を実施しました2)。試験体の外観と実験において脱線防止ガードに車輪が接触したときの様子を図1,図2に示します。実験の結果,脱線防止ガード支持剛性として,概ね1車輪あたり2.5MN/mの支持剛性を見込めることがわかりました。また,脱線防止ガードの変位が著大にならず,車輪の脱線を防いでいる条件下においては,少なくとも数回の接触では脱線防止ガードが破壊しないことを確認しました。なお,この実験は,バラスト軌道においてレールに取り付けるタイプの脱線防止ガードの試験結果であり,スラブ板やコンクリートまくら木などに直接取り付けるタイプの脱線防止ガードでは,異なった支持剛性値になると推定されます。
4 ヨーダンパーの配置変更による地震対策
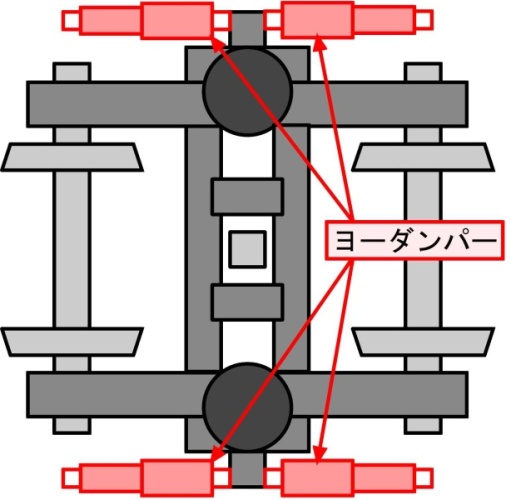
ヨーダンパーは近年主流となっているボルスタレス台車を装備した車両において,台車だ行動を抑制し,高速走行するために欠かせないもので,通常は台車片側に1本,1台車あたり計2本ついています。地震時に車体が大きく揺れると,ヨーダンパーにより台車を旋回させる力であるヨーモーメントが台車・車体間に作用し,台車の軌道追従性を阻害する可能性があることがわかってきました。そこで,ヨーダンパーを図3に示すように,台車内前後対称に4本配置することで車体が大きく揺れた際のヨーモーメントの発生を抑制し,地震時の走行安全性を向上することを提案しました。通常走行時の走行安全性や乗り心地に影響を与えないよう,1本あたりの減衰力を通常の半分としています。
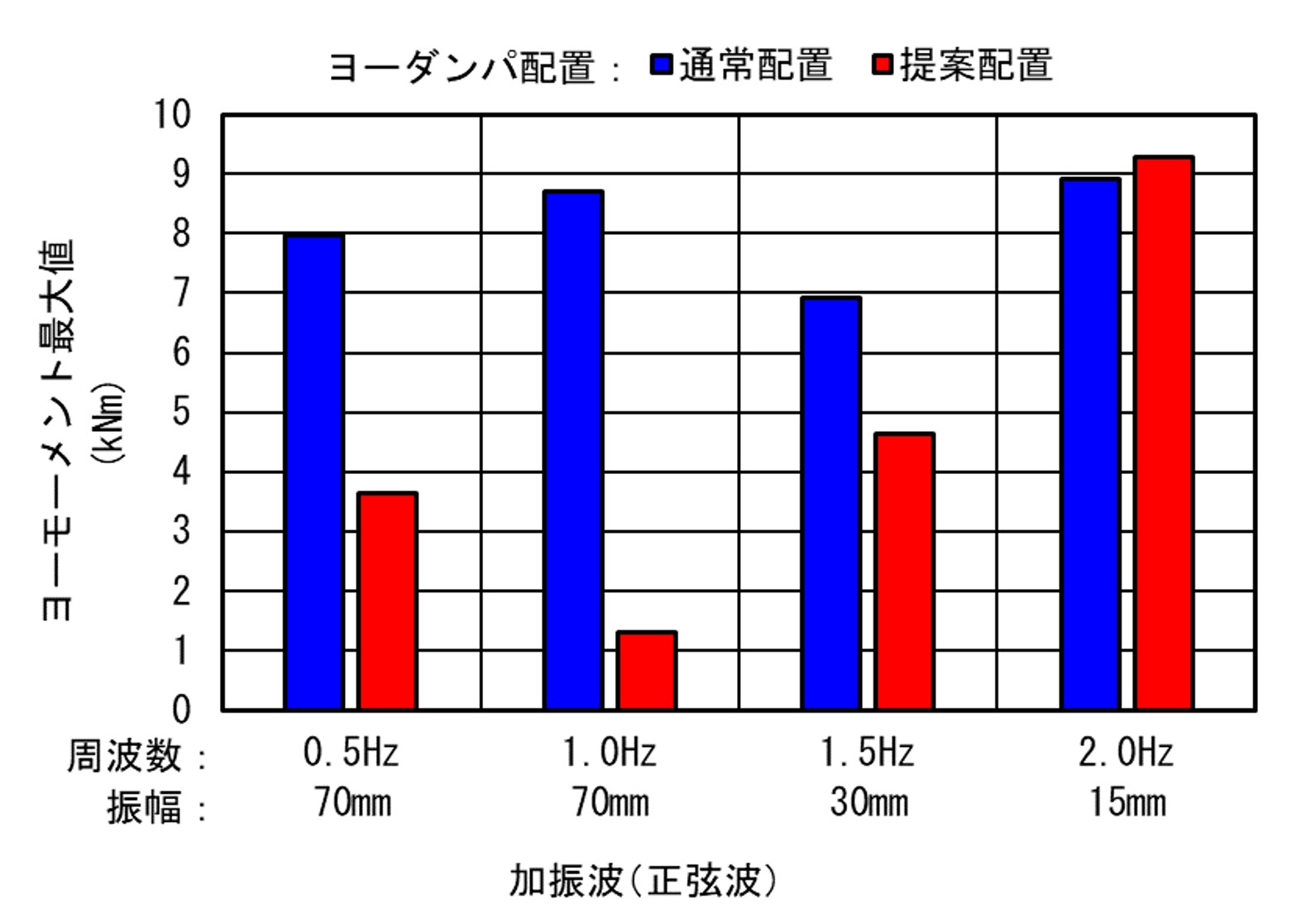
この対策の効果を車両運動シミュレーションで調べた後,実物を製作し,大型振動試験装置による実台車加振実験でその効果を確認しました(図4)3)。正弦波加振に対する結果を図5に示します。図より,車体が大きく揺れる比較的低い周波数の加振において,ヨーダンパーを提案配置とすることで発生ヨーモーメントを低減できることがわかります。
5 地震対策による地震時走行安全性向上効果
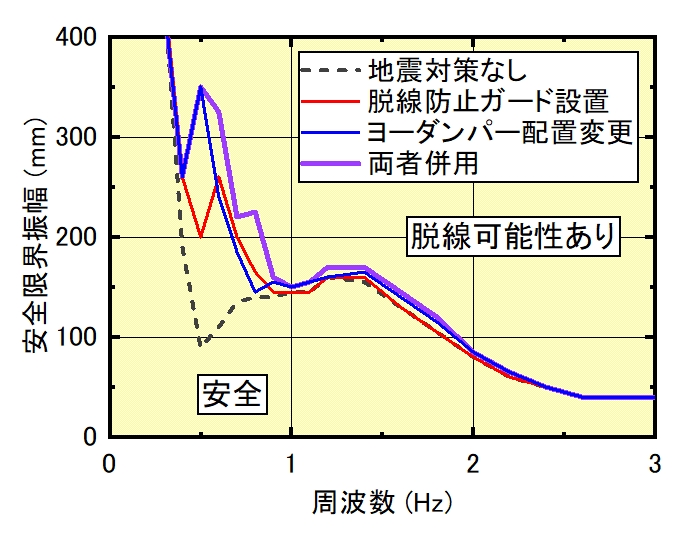
ここでは,これまで述べてきた地震対策としての在来線用脱線防止ガードの設置,ヨーダンパー配置変更の地震時走行安全性向上効果について,車両運動シミュレーションによる結果を示します。脱線防止ガードは軌道側の対策で,ヨーダンパー配置変更は車両側の対策なので,両者を併用することができます。在来線の中でも比較的高速で走行するヨーダンパーを装備した車両について,在来線用脱線防止ガードを設置した場合,ヨーダンパー配置を変更した場合および両者を併用した場合の正弦波加振に対する安全限界線図(正弦波5波で加振した際に脱線しない限界の加振振幅をプロットした線図)を図6に示します。図より,脱線防止ガードの設置では0.4Hz~0.9Hzの領域で,ヨーダンパー配置変更では0.4Hz~0.8Hzの領域で安全限界振幅が大きくなっており,地震時走行安全性が向上していることがわかります。両者を併用することでさらに安全限界振幅が大きくなります。紙面の都合上,詳細については割愛しますが,地震波(ランダム波)に対する効果として,規模の大きい地震動に対して,在来線用脱線防止ガードを設置したりヨーダンパー配置を変更することで脱線発生確率を概ね半減でき,両者を併用するとさらに脱線発生確率を低減できることがわかりました。
6 おわりに
在来線の地震時走行安全性向上策を2つ紹介し,今回の例ではそれら2つの効果が概ね等しくなっていることがわかりました。本手法を用いることで,鉄道事業者において,路線の事情に適した対策を選択できるようになると考えられます。
今後も引き続き地震時走行安全性向上策に関する研究を進めていく計画です。
参考文献
1)東日本旅客鉄道株式会社:大規模地震に対する取り組みについて,2013年3月5日付プレスリリース
2)Iida, K. et al.:An Experimental Study on the Performance of Guard Angle of Meter-Gauge Track during an Earthquake, Proceedings of 26th IAVSD Symposium, Paper No.024, 2019
3)飯田浩平ほか:ヨーダンパを装備した在来線車両の地震時走行安全性向上に関する研究,日本機械学会第29回交通・物流部門大会(TRANSLOG2020)講演論文集,講演No.3802,2020
鉄道力学研究部 車両力学 主任研究員 飯田 浩平
【解説】主電動機(上)
1 モーターの誕生から電車の誕生まで
世界で初めて作られたモーターはイギリスのファラデー(Faraday)による電磁現象の研究・実験の中で1821年に誕生したとされています。ただし,このときのモーターは棒が電磁力で回転運動をするというだけのもので,何かを回したりできるものではありませんでした。また,電源が容易に得られる時代では無く,実用的な応用を考えることができる段階にありませんでした。
しかし,その後,1820~30年代に徐々に新しいアイデアが加えられていき,実用的なモーターを目指した改良が進められました。そして,アメリカの鍛冶屋であったダベンポート(Davenport)が磁極を円筒状に並べたモーターを考案し,さらに1835年にそのモーターで駆動する今日の鉄道車両模型のようなものを作り公開しました。
ダベンポートのモーターは固定側に永久磁石を配置し,回転子側に電磁石を配置した電動機であり,原理的には,現在も玩具用のモーターで広く用いられている直流モーターと同じものだったようです。
その後,固定側に永久磁石ではなく電磁石を用いる自己励磁式の直流機が開発されていき,強力な力を発生させることができるようになりました。そして,1879年にベルリン博覧会でドイツのシーメンス(Siemens)が電気機関車を出品しました(図1)。この機関車は第3軌条から集電してレールを帰線とする世界最初の集電式の電気鉄道でした。1881年にシーメンス-ハルスケ(Simens Halske)社が世界最初の電気鉄道営業運転をベルリン近郊で開始しました。
初期の電車は主電動機の動力をワイヤーロープやベルトで伝達していましたが,まもなく歯車で動力を伝達するようになっていきました。そして,1886年には,アメリカのスプレイグ(Sprague)(図2)が電動機の一端を車軸上に他端を台車枠に支持し,歯車で動力を伝達する方法を考案しました(図3)。これは吊り掛け式と呼ばれる装架方式で,現在でも用いられている方式です。
さらに,スプレイグは架空電車線からトロリーポールを用いて集電する電力供給方式を考案し,リッチモンドで路面電車の営業運転を開始し,大成功を収めました。黎明期には蓄電池を電源とした電車も試作されていましたが,当時の蓄電池は十分な容量が無く,充電に時間がかかり重量も重かったことから,電車の電源として十分な性能がありませんでした。また,レールから給電する方式は電圧を高くすることが難しく,大きな電力を送電することが困難でした。そのため,電車線からの集電技術の確立によって初めて本格的な電車が可能となったのです。
また,スプレイグは運転台からの指令で複数の主電動機を同時に制御して連結した電車を走らせる方式を考案したり,回生ブレーキを用いた車両を作ったりもしました。すなわち,現在,電車と呼ばれているものを実現するのに必要な技術の多くを作り上げました。
 図1 ベルリン博覧会の電気機関車
図1 ベルリン博覧会の電気機関車
出典:Wikimedia Commons [Public domain]
 図2 電気駆動の父,スプレイグ
図2 電気駆動の父,スプレイグ
出典:Wikimedia Commons / CC-BY-SA-3.0 / GFDL
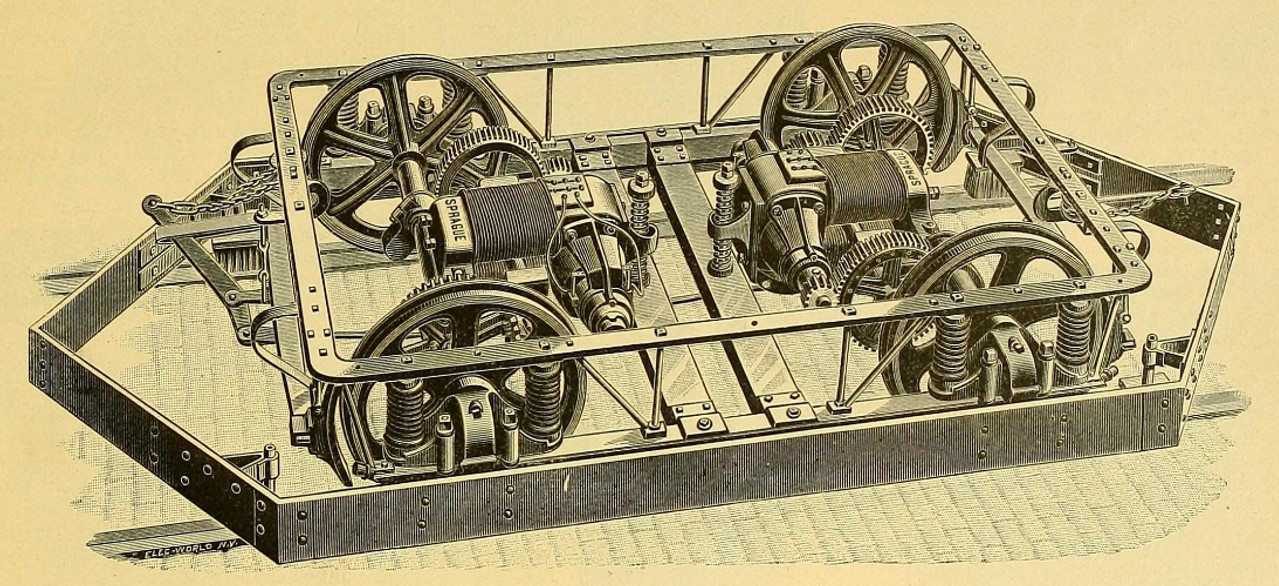 図3 スプレイグのモーターを搭載した台車
図3 スプレイグのモーターを搭載した台車
出典:The Street Railway Gazette (1888-12)
2 直流モーターによる電車駆動技術の発展
スプレイグの会社は,その後,エジソン(Edison)の会社等と統合され,現在のゼネラル・エレクトリック(General Electric)社(以下GE)となりました。GEでは統合された各社の経験を参考にして,1892年に全密閉形の直流直巻電動機GE-800形を試作し,その後,その改良形のGE-57形を試作しました。一方,GEと並んで現在の電気機器技術の礎を築いた電機メーカーであるウェスティングハウス(Westinghouse)も1894年に同じく密閉形の直流直巻電動機12-A形を製作し,その2形式が当時の標準となったようです。
初期の電動機はフレームで覆われておらず内部構造がむき出しの開放形でしたが,上述の電動機はフレームで覆われた密閉構造で,電動機の内部構造が保護されており,今日のモーターと同じような外観になっていました。
その後,1905年に,固定子側に補極を設ける構造が考案され,良好な整流が可能となり,様々な改良が加えられながら,電動機の出力や最高回転速度を徐々に向上していきました。そして,1912年に試作されたピッツバーグ(Pittsburgh)社の電車で用いられたウェスティングハウス社の電動機328形では,回転子軸にファンを取り付けた自己通風冷却方式が採用されました。それまでの間,電車用モーターの構造は水の浸入を防ぐために全密閉構造を採用してきましたが,回転子にファンを取り付けて通風冷却をすると電動機出力を向上することが可能なことが分かり,その後は,自己通風式が主流になっていきました。
そして,主電動機の方式は,装架方式が吊り掛け式,冷却方式が自己通風式の直流直巻電動機が主流となり,その後長期間に渡り使用された方式が確立されました。
このように、主電動機は当初直流機が主流でした。しかし,直流機はブラシと整流子により,摺動接触させながら回転子に電流を流す仕組みであるため,それらの摩擦摩耗部品の保守が必要でした。そこで,そういった保守が不要なインバーター駆動誘導機が登場すると,新しく作られる電車では直流機は用いられなくなり,主電動機はインバーター駆動誘導機に置き換わっていきました(後編につづく)。
参考文献
・ 松田新市:「高速度電動機と駆動装置」,電気車研究会,1958
・ 大木創,田中国昭:「電気機器論 設計思想と技術の変遷」,実教出版,1984
・ 持永芳文,宮本昌幸 編著:「鉄道技術140年のあゆみ」,コロナ社,2012
車両制御技術研究部 動力システム 室長 近藤 稔