車両ニュースレター
2022年1月号
[クローズアップ]鉄道技術展への出展
2021 年11 月に幕張メッセで「第7回鉄道技術展2021」が開催されました。鉄道に関する様々な分野の技術が一堂に介するイベントで,緊急事態宣言が解除されていたこともあり多くの来場者がありました。
現在新型コロナウイルス感染症により鉄道業界においても厳しい状況が続いており,鉄道事業者では業務の改革が急務となっています。その中で「省力化・省人化」は大きなキーワードであり,これを実現するためのデジタル技術の開発・導入が進んでいます。
鉄道総研においてもデジタル技術による鉄道システムの革新を目指した研究開発に力を注いでいます。本技術展においては「3次元画像を活用した構造物目視検査支援システム」,「線路周辺画像解析エンジンを用いた巡視支援システム」などの鉄道DXに資するソフトウェア主体の成果展示を中心とし,そのほか地震対策などの展示を行いました。
車両関係では,「燃料電池・バッテリーハイブリッド試験電車」の成果展示を行いました。水素を燃料とする燃料電池や電力変換装置などの機器の小型化・高性能化により,走行に必要な機器を床下に収め,客室空間を確保するとともに,電車相当の加速が可能です。鉄道車両における脱炭素化技術の一つとして期待されており,関心を集めていました。
そのほか,「車両側面カメラを用いたホーム上の安全確認支援システム」の成果展示を行いました。列車乗降時の旅客の安全性向上およびワンマン運転における運転士のドア開閉操作の支援のために,車両側面カメラにより人物の車両への接近を誤差20㎝程度で検知できるアルゴリズムを開発しており,接近状態を乗務員へ通知する装置を試作しています。こちらでは来場者が検知状況を体験でき,仕組みに関する質問が多数ありました。
ブースでは展示毎にリモートで来場者と研究者が直接対話できるようにしており,今後の展開に向けて貴重なご意見をいただくことができました。来場された皆さまに感謝申し上げます。
鉄道総研では,車両の状態監視手法に関する研究開発なども進めており,これらを含め情報をタイムリーにリリースし,鉄道事業者の業務の革新を支援していきたいと考えています。
事業推進部 部長 片岡 宏夫
[研究&開発]横圧低減と走行安定性を両立する操舵システム
1 はじめに
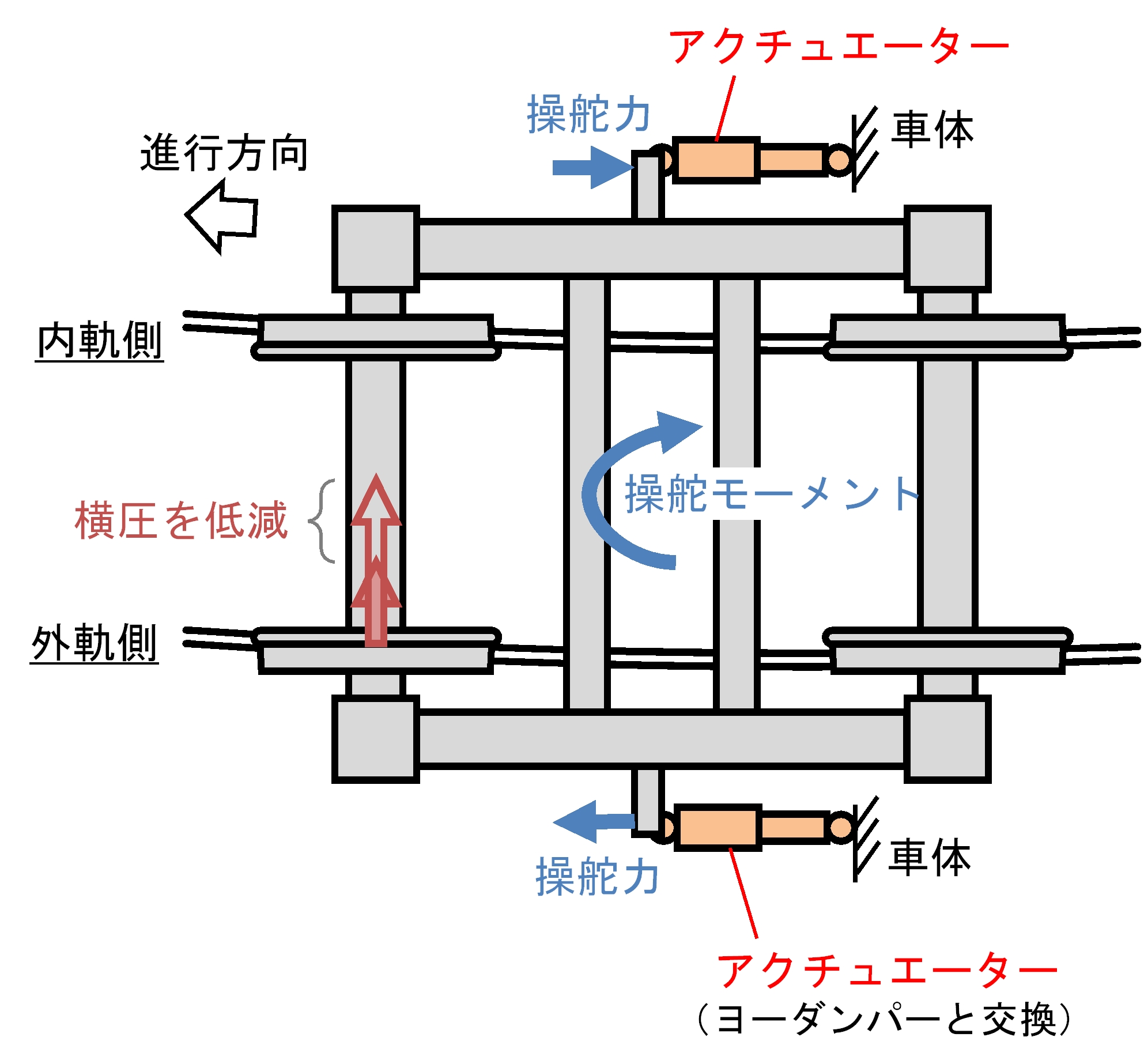
鉄道車両の台車は,高速で走行する際に蛇行動と呼ばれる不安定な動きをしない「走行安定性」と,曲線に沿ってスムーズに曲がることができる「曲線通過性能」という両方の走行性能が求められます。しかし,それらは相反する性能であるため,高いレベルでの両立が困難となります。そこで,台車構造の大きな変更を伴わずにこれらの走行性能を両立させる手段として,ボギー角操舵システムを開発しました。ボギー角とは,曲線通過時などに発生する車体-台車間の相対角度(相対ヨー角)です。
本システムでは,この車体-台車間に操舵力を与えることで,先頭軸外軌側で発生する著大な横圧(車輪とレールが左右方向に押し合う力)を低減して曲線通過性能を向上させることを目的とし,高速で走行する車両が走行安定性を確保するために搭載しているヨーダンパーをアクチュエーターに置き換えて操舵することを検討しました(図1)。
ここでは,このボギー角操舵システムの概要と鉄道総研の所内試験線で実施した曲線通過性能試験結果について紹介します。
2 ボギー角操舵システムの概要
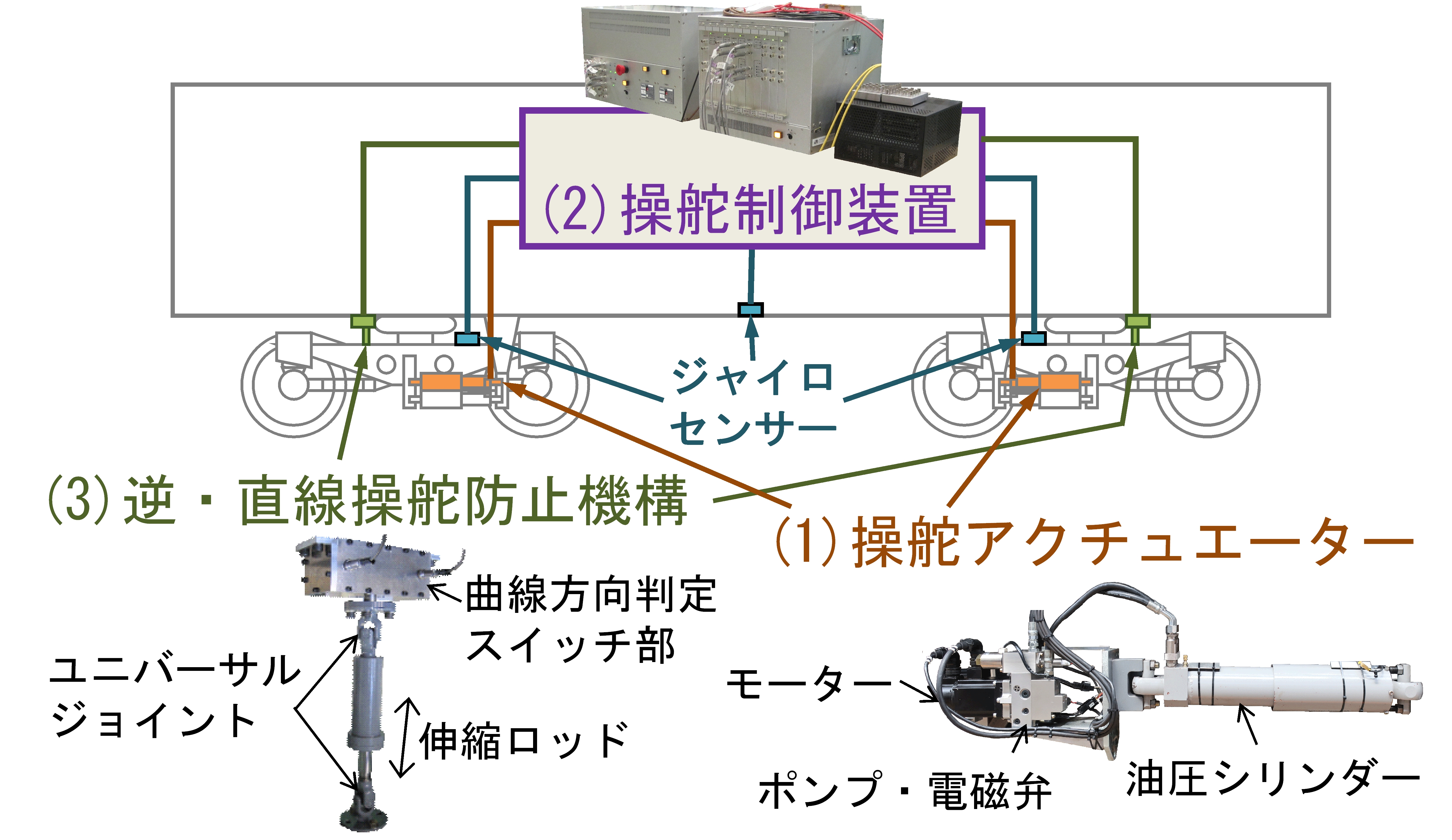
開発したボギー角操舵システムは,(1)走行安定性を確保する必要がある場合にはヨーダンパーとしても動作可能な操舵アクチュエーター,(2)ジャイロセンサーの信号から曲線を検出して操舵制御を行う操舵制御装置,(3)ボギー角を機械的に検出して誤った操舵動作を防止する機構(逆・直線操舵防止機構)の3 要素で構成しています(図2)。それでは,各構成要素を詳細に説明していきます。
(1)操舵アクチュエーター
操舵アクチュエーターは,操舵力を発生させる機能に加えて,減衰力特性を切り替え可能なヨーダンパーの機能を持っており,走行区間に応じて以下の3 モードを切り替えることができます。なお,搭載スペースを考慮して,モーターおよびポンプ・電磁弁ユニットを油圧シリンダーから分離してホースで接続する構成としています。
① アクチュエーターモード
曲線区間において操舵制御する場合のモードです。指令に応じて伸縮する力(操舵力)を発生させます。
② 減衰大モード
高速走行時に走行安定性を確保する場合のモードです。伸縮時に押し出される油の流れを制限することで大きな減衰力を発生させます。
③ 減衰小モード
低速走行時や直線区間など制御を行わない場合(非制御)のモードです。伸縮時に押し出される油の流れは制限せず,発生する減衰力は小さくなります。
(2)操舵制御装置
操舵制御装置は曲線を検出し,さらに曲線に応じた操舵力を決定して,操舵アクチュエーターに指令する役割を担っています。本システムでは,おもに円曲線を対象に曲線通過性能を向上させることを目標とし,ジャイロセンサー方式を用いた下記に示すシンプルな操舵制御アルゴリズムを採用しています。
① 操舵アクチュエーターのモード切替
走行速度に応じて,操舵アクチュエーターの3 モードを切り替えます。高速走行時(例えば130km/h 以上)は,減衰大モードとし,減衰力を発生させて走行安定性を確保します。それ以下の速度においては,アクチュエーターモードとして曲線で操舵制御を行います。ただし,極めて低速時は,算出される線路曲率の精度が低下するため,操舵制御を行わず,減衰小モードとします。
② 線路曲率の算出
曲率は,ジャイロセンサーで測定したヨー角の変化する速度を走行速度で除して,高い周波数の振動成分を除去することにより算出します。この際に設定したしきい値より曲率が大きい(曲線半径が小さい)場合には操舵制御を行います。曲線で確実に制御するために,車体および各台車のヨー角速度から曲率を算出し,すべてがしきい値を超えた場合にのみ制御を行います。
③ 操舵力算出
必要な操舵力は曲率に比例すると仮定して,上記で算出した曲率に比例させた操舵力とします。比例定数は,走行路線に合わせて実験的に求めます。
(3)逆・直線操舵防止機構
ボギー角を機械的に検出することで,曲率の算出に異常が生じても逆操舵および直線区間での操舵を防止できる逆・直線操舵防止機構を設けました。本機構は,回転自由度を持たない伸縮可能なロッドの両端にユニバーサルジョイントを接続した構造1) とすることで,走行中の車体-台車間に発生する並進および回転運動の中から,相対ヨー角のみを正確に抽出することができます。そして,急曲線(曲線半径600m 以下を想定)におけるボギー角で反応する接触スイッチと組み合わせて,直線・曲線の判別および曲線方向の判別に限定して使用することで逆操舵および直線での操舵防止機能を高めました。
3 性能試験結果
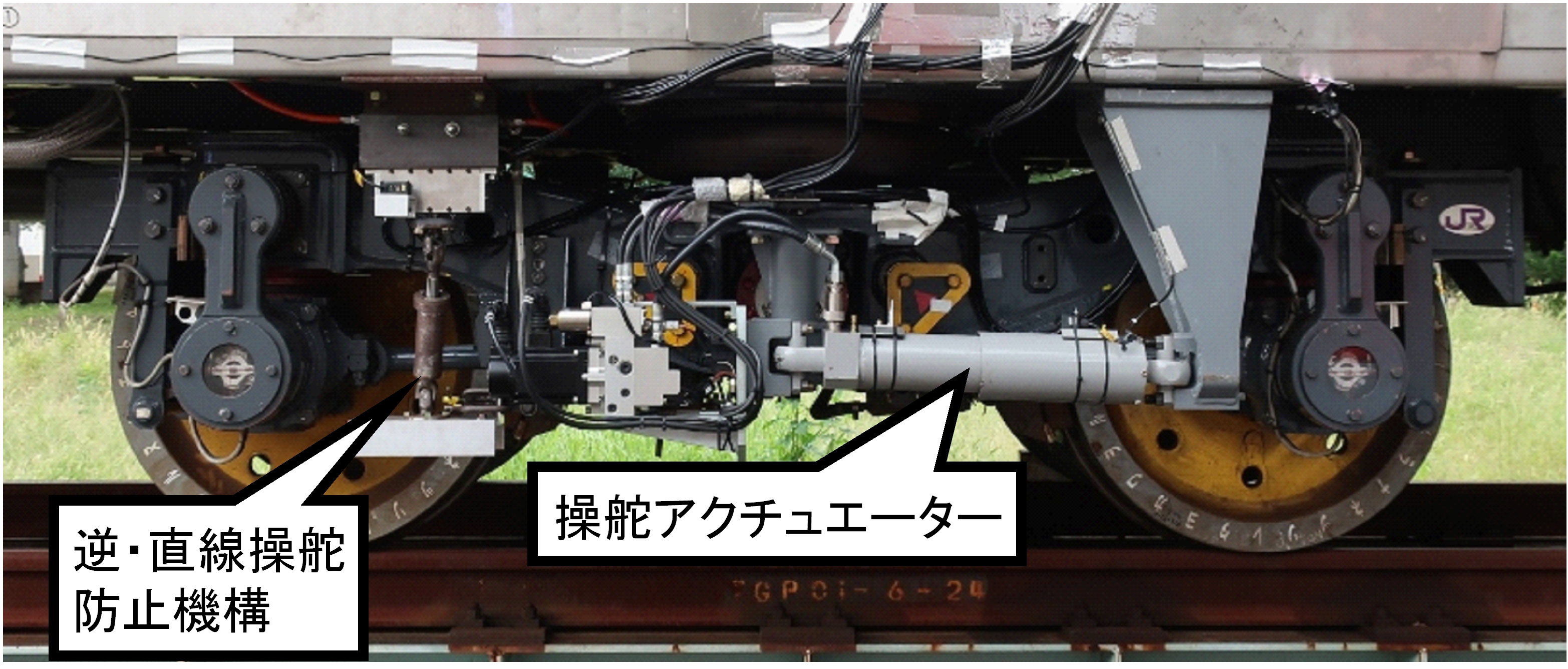
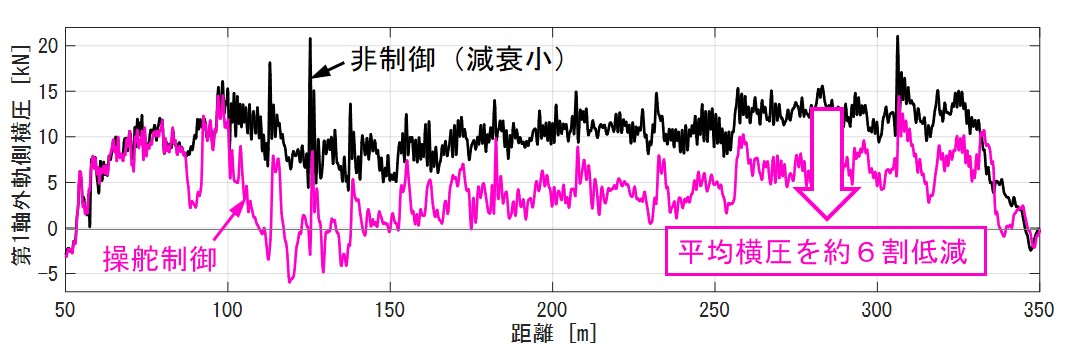
試作したボギー角操舵システムの曲線通過性能の向上効果を評価するため,在来線試験車両に本システムを搭載し,鉄道総研の所内試験線にて曲線通過性能試験を実施しました(図3)。曲線半径160m の曲線区間を最高速度30km/h で走行した際の先頭(第1)軸外軌側横圧の測定結果を図4 に示します。操舵制御により円曲線中の横圧が低減され,非制御時と比較して平均横圧を約6 割低減できることを確認しました。
また,高速車両試験台を用いて,走行安定性試験を実施し,本操舵アクチュエーターを装備した台車が,通常のヨーダンパーを装備した台車と同等の走行安定性を有していることを確認しています。
4 おわりに
曲線区間において台車に対して操舵モーメントを与えることで横圧を低減して曲線通過性能を向上し,直線などの高速走行区間ではヨーダンパーとして動作することで走行安定性も両立できるボギー角操舵システムと,その性能試験結果について紹介しました。今後も特急車両などへの適用を目指して,最適な操舵制御パターンの検討などを進めていきます。
参考文献
1)山長雄亮,鴨下庄吾,梅原康宏: 機械式空気圧操舵システムの機構と横圧低減効果,鉄道総研報告,Vol.31,No.6,pp.35-40,2017
車両構造技術研究部 走り装置 主任研究員 梅原 康宏
[研究&開発]列車運行電力シミュレータによる省エネ効果の試算手法
1 はじめに
電気鉄道は,架線から供給される電気を利用して列車を加速し,運行させています。列車運行に関する消費エネルギーを削減するための取り組みが,様々な鉄道事業者で行われています。その取り組みの代表例が回生ブレーキの有効活用です。回生ブレーキによって,ブレーキ時にモーターを発電機として使用して架線へ電力を戻します。この回生ブレーキの有効活用を狙った様々な省エネ技術が開発されています。また,回生ブレーキ以外にも,車両の機器の効率を高めたり,電気抵抗が少なくなるような電力供給設備の構成に変更したりする工夫も行われています。
それらの様々な省エネ技術から,限られた予算の中で効果の高い導入方法を検討すべきですが,その施策毎に費用対効果はさまざまです。省エネ技術の導入において難しい点は,省エネ車両を導入する路線の特性や省エネ電力設備を設置する場所によってその効果が変わってくることです。同じスペックの省エネ技術を導入するのであれば,効果の高い導入方法の検討が求められます。また,後述するように,現状よりも高性能な新型車両の導入は,省エネ化だけでなく,走行時間を短縮することも可能であり,その導入効果を予測する際には,エネルギー以外の観点を考えることも重要になります。
このような省エネ技術の導入検討のために,鉄道総研では広範囲で多数の列車の運行エネルギーを予測する列車運行電力シミュレータを開発しました。本記事では,そのシミュレータの仕組みと,省エネ技術の導入効果の予測の事例を紹介します。
2 列車運行電力シミュレータの仕組み
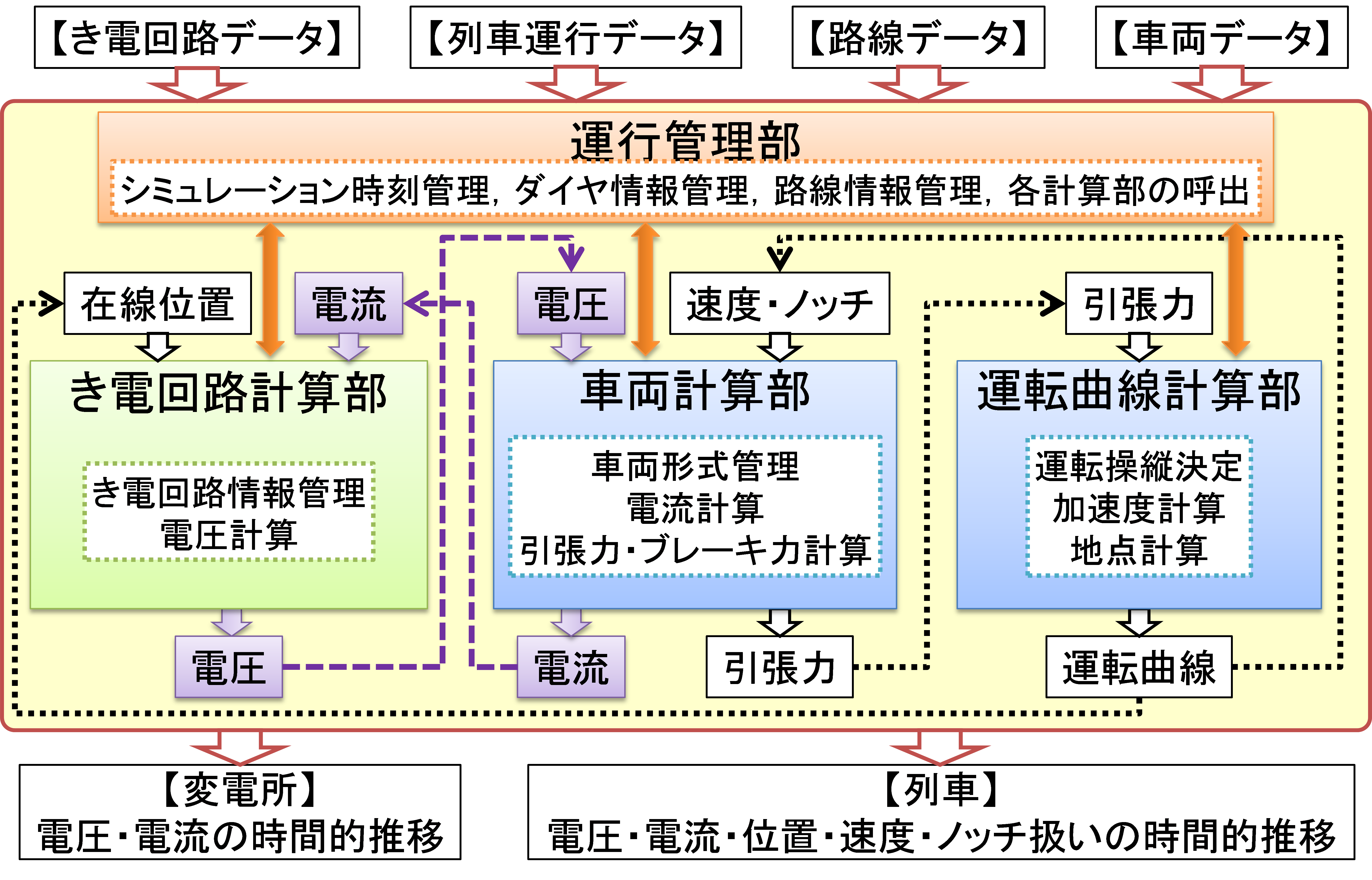
列車運行電力シミュレータは,直流電気鉄道の列車運行をシミュレーションして,その消費エネルギーを計算するシミュレータです(図1)。運行管理部は,設定した列車ダイヤに従って,列車を発車させる計算処理を呼び出します。列車を発車させる際には,運転曲線計算部が列車の運転曲線を作成します。この時,車両計算部が計算した引張力を用いて運動方程式を解きながら,列車の力行・惰行・ブレーキの運転状態を決めていくことで運転曲線が作成されます。引張力は,き電回路計算部が計算した架線の電圧によって変わります。架線の電圧は,電気回路の方程式を解くことで求めますが,列車の在線位置,すなわち,列車ダイヤと運転曲線によって変わってきます。つまり,架線の電圧,引張力,運転曲線は相互に依存します。そこで,各時刻ステップで架線の電圧に応じた運転曲線を再計算しながら,時刻ステップを進めていきます。
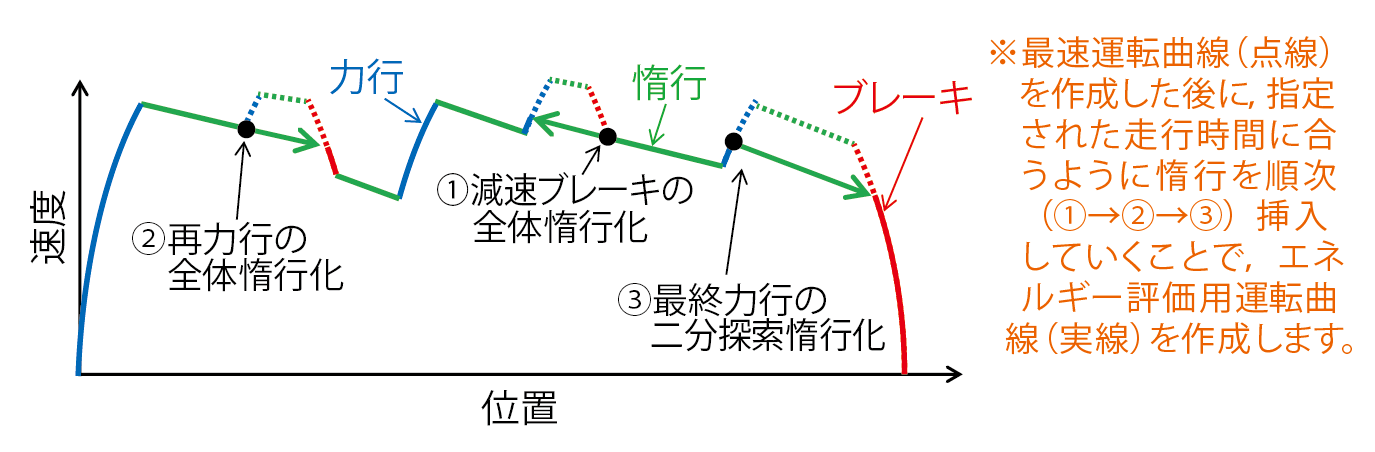
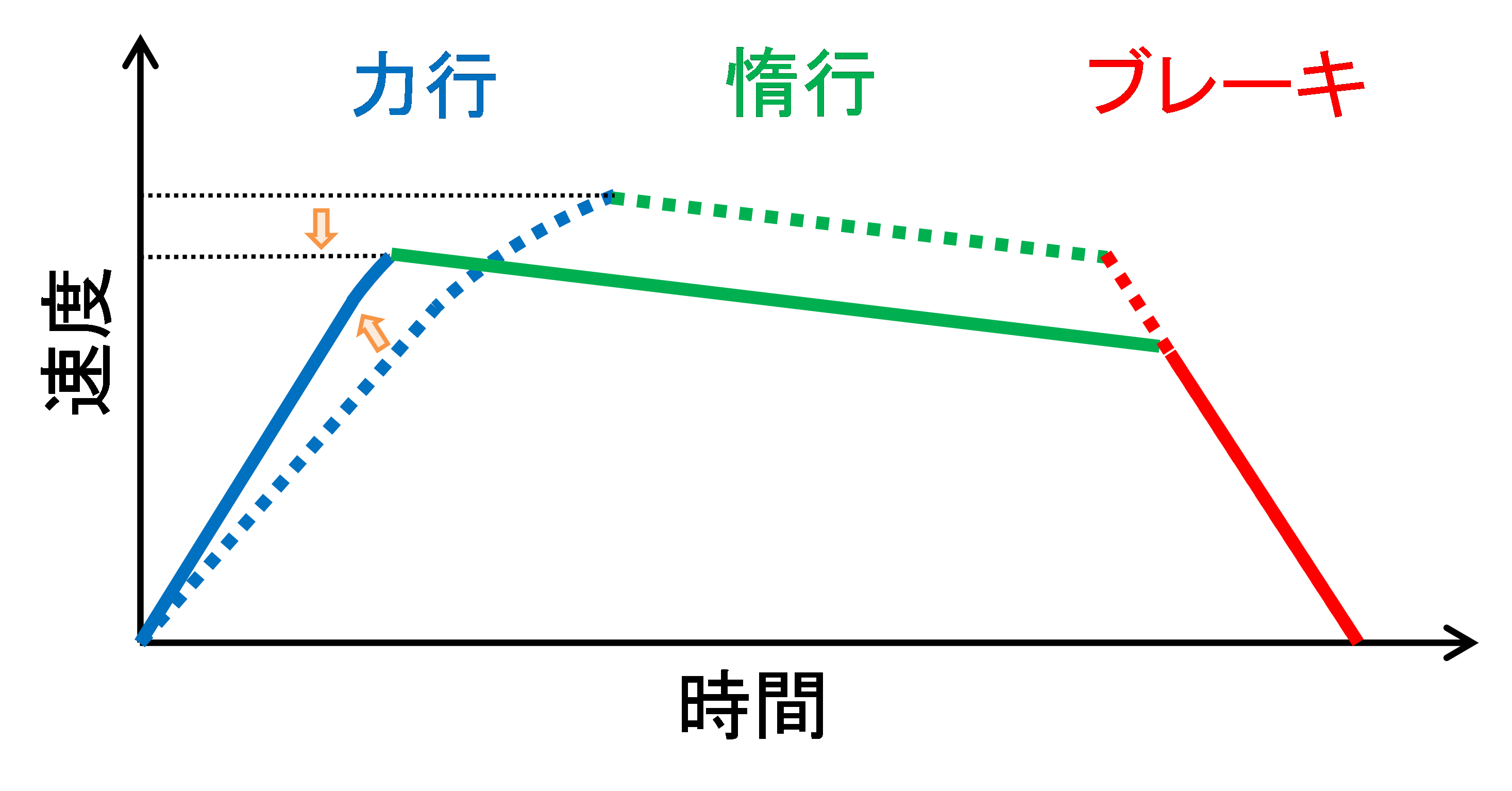
また,列車運行電力シミュレータの特徴の1つとして,エネルギー評価用運転曲線を作成する機能が挙げられます(図2)。運転曲線は消費エネルギー計算に大きく影響するため,指定された走行時間に合わせた実際の運転方法に近い運転曲線を作成することを目指し,エネルギー評価用運転曲線の機能を開発してきました。エネルギー評価用運転曲線では,最速となる運転曲線を作成した後に,惰行を挿入していき,指定された走行時間に合わせた運転曲線を作成します。
3 新型車両の省エネ効果
それでは,省エネなモーターやインバータを搭載した新型車両の省エネ効果を予測した例を紹介します。一般に,新型車両と既存車両では編成質量や引張力の差違により,加速度が異なってきます。今回は,加速性能が大きく向上した新型車両を導入した場合の省エネ効果と走行時間短縮効果の評価事例を紹介します。
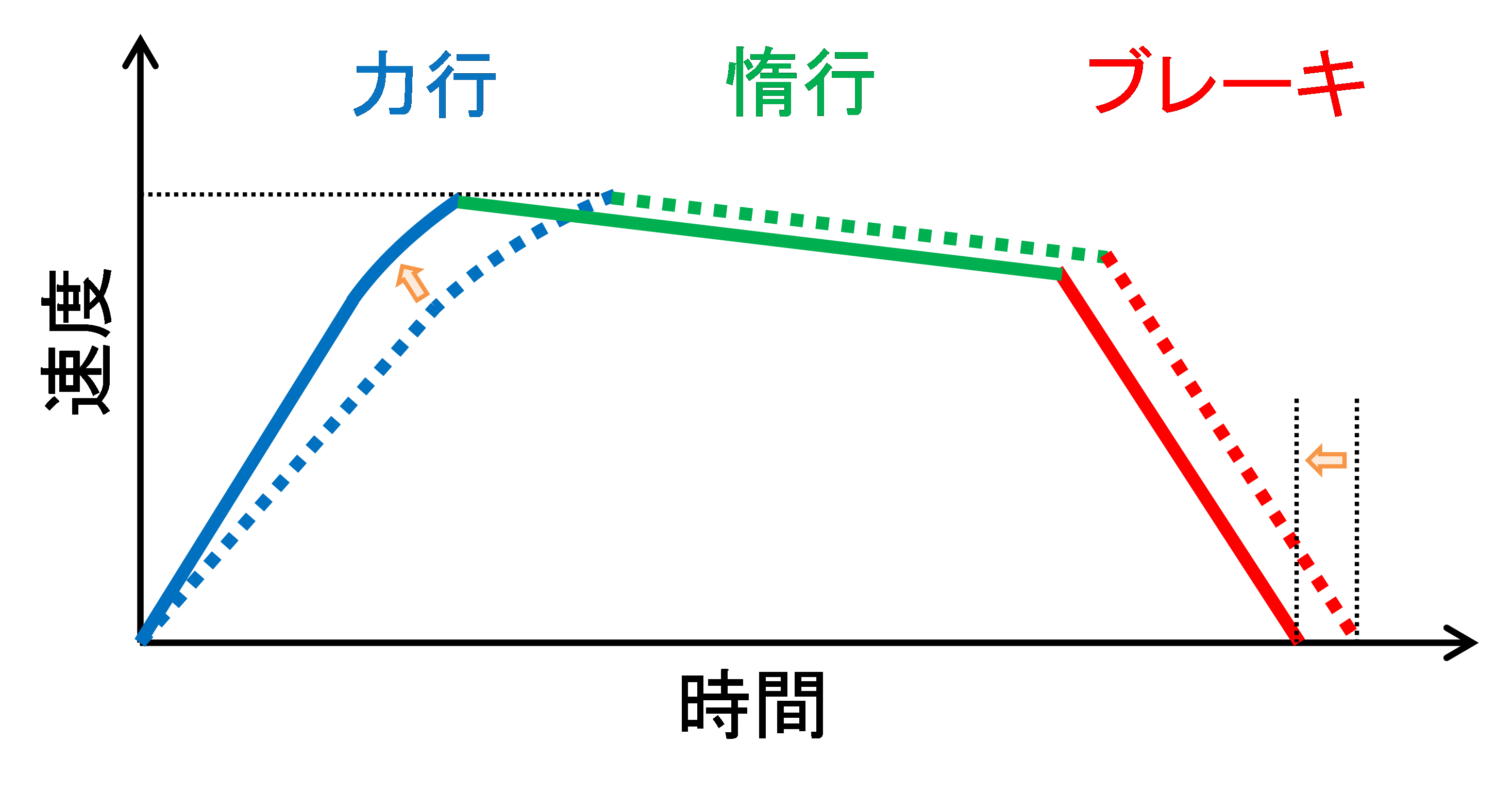
加速性能が向上した場合の走り方として大きく分けて2通りがあります。1つは,加速性能の向上によって走行時間を短縮することです(図3(a))。もう1つは,早く加速して,早めに加速をやめて,惰行を長く取ることです(図3(b))。後者のような走り方をすると,同じ走行時間にするならば力行をやめる速度を低くすることが可能になるので,消費エネルギー低減につながります。このため,加速性能が変わった場合には,走り方を適切に設定して消費エネルギーを評価する必要があります。また,新型車両に省エネ機器を導入した場合には,このような走り方の変化だけでなく,車両の機器効率が向上することによる省エネ効果も期待できます。このため,走り方の変化による省エネ効果と,省エネ機器による省エネ効果の両方を適切に評価することが求められます。
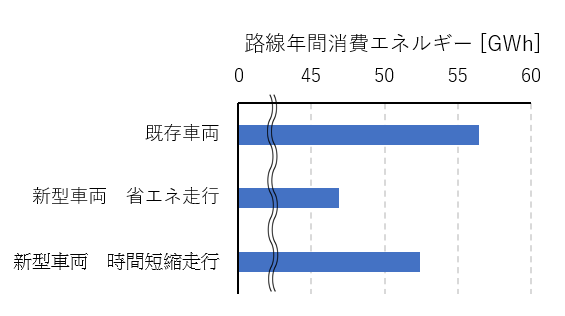
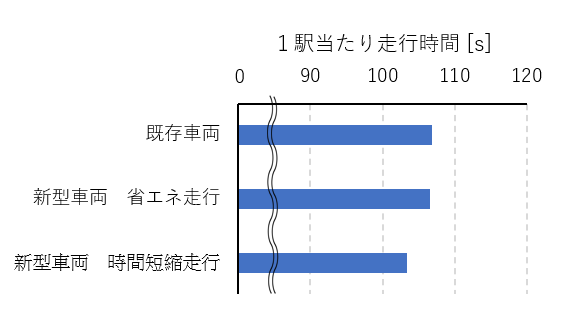
そこで,新型車両の省エネ効果について条件を分けて評価しました。新型車両を既存車両と同じ走行時間で走行した場合と,時間短縮を図った場合を比較することにしました。同じ走行時間で走行する場合には,現行の列車ダイヤに合わせて走行するようにエネルギー評価用運転曲線作成機能を使用しています。このようにして計算した結果の例を紹介します。この路線全体での消費エネルギーを図4に,1 駅当たりの走行時間を図5に示します。この例に示す新型車両は,走行時間を短縮しても消費エネルギーの削減に繋がりますが,同じ走行時間で走行した方が消費エネルギーの削減量は大きくなります。このように,加速性能の向上は,消費エネルギーの削減に活用することもできますし,走行時間の短縮に活用することもできます。
4 おわりに
列車運行電力シミュレータを活用した省エネ技術の導入効果の予測手法を紹介しました。今後は,本手法を用いて,省エネ技術の効果的な導入方法について調べていく予定です。
本研究の一部は,国土交通省の鉄道技術開発費補助金を受けて実施しました。
参考文献
1) 小川知行:列車運行電力シミュレータの開発,鉄道総研 車両ニュースレター,No.46,pp.2-3,2019
2) 武内陽子・小川知行・森本大観・今村洋一:列車運行電力シミュレータの開発,鉄道総研報告,Vol.30,No.8,pp.5-10, 2016
3) 小川知行・武内陽子・森本大観・今村洋一・影山真佐富:エネルギー評価用運転曲線を用いたエネルギーシミュレーション,鉄道総研報告,Vol.30,No.11,pp.29-34, 2016
4) 小川知行・武内陽子・森本大観:列車運行電力シミュレーターで省エネ技術の導入効果を予測する,RRR,Vol.78,No.10,pp.20-23,2021
車両制御技術研究部 水素・エネルギー 主任研究員 小川 知行
[研究&開発]車両の着雪を予測する着雪解析手法の開発
1 はじめに
鉄道車両が冬季に降雪地帯を走行すると,線路上の雪が舞い上がり,鉄道車両の床下や台車に雪が付着して成長していきます。この着雪の塊は氷に近い硬さとなり,成長すると数十kgを超えることもあります。走行時の振動や分岐器を通過するときに発生する衝撃で,成長した着雪が落下すると,線路のバラストが飛び散り,鉄道車両や鉄道設備,沿線家屋への被害が発生する可能性があります。また,分岐器のレールの隙間に挟まると,進路の転換を行うことができなくなることもあります。
このような問題を解決するために,着雪に関するさまざまな研究が行われていますが,観測や実験,簡易式を用いたアプローチが多く,着雪メカニズムを解明するに至っていません。そこで,本研究では着雪しにくい鉄道車両形状の開発を目標に,着雪成長プロセスを再現できる着雪解析手法を開発しました。
2 着雪解析手法
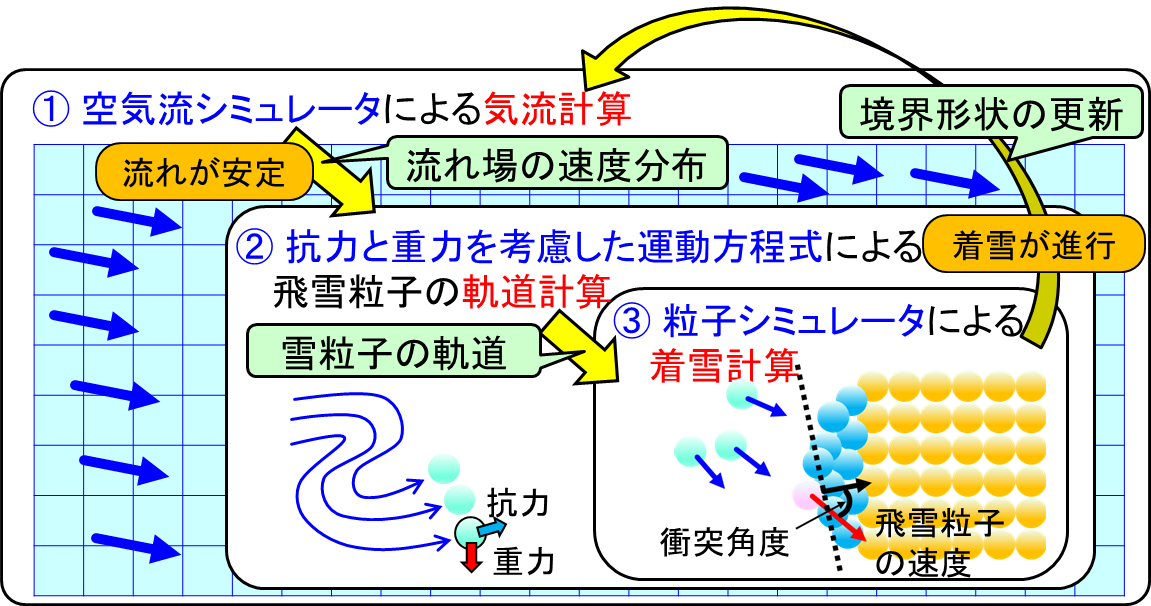
本研究で開発した着雪解析手法1) は,図1 のような手順で実施されます。まず,空気流シミュレータによる気流計算を行います。次に,雪を球形状にモデル化して,空気流の速度分布を用いて,抗力と重力を考慮した運動方程式により,飛雪粒子の軌跡を計算します。その後,粒子シミュレータにより着雪計算アルゴリズムを用いて着雪計算を行います。着雪が進み,着雪形状に変化がみられると,その形状を空気流シミュレータの境界形状へと反映し,ふたたび気流計算を行います。このようにして,本研究の着雪解析手法では,気流計算による飛雪粒子の軌道が着雪計算に影響を与え,着雪計算は境界形状を変化させることにより気流計算に影響を与えています。お互いの計算に影響を与えあいながら計算を行っていく解析のことを双方向連成解析といいます。
気流計算では,空気の流れを不等間隔の直交格子による差分法により計算しています。構造物が配置され,流れが乱れることが予想される場所に,細かい格子を配置しています。軌道計算では,抗力(空気抵抗)と重力を考慮した運動方程式により,飛雪が飛ぶ方向を計算しています。飛雪粒子の粒径や密度,効力係数には,降雪風洞実験で測定した値を用いています。着雪計算では,着雪現象にまだ理論的な原理が確立されておらず,未解明な部分が多いため,立方体模型への着雪形状から考察する実験的な方法により,着雪するかどうかを判定する着雪計算アルゴリズムの開発を行いました2)。この着雪計算アルゴリズムでは,降雪風洞実験結果から得られた,飛雪の速度が遅く,衝突角度が小さいときに,着雪が発生しやすいなどの関係を数式化しています。
3 立方体模型の着雪解析
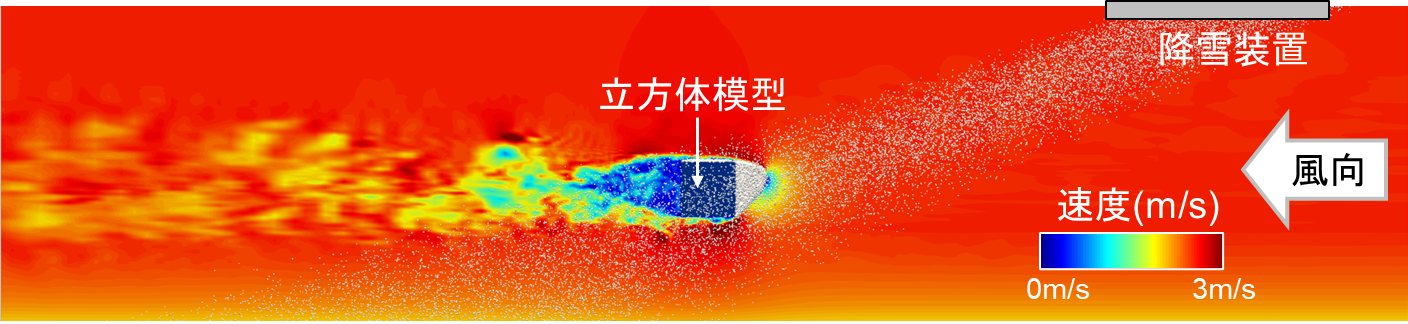
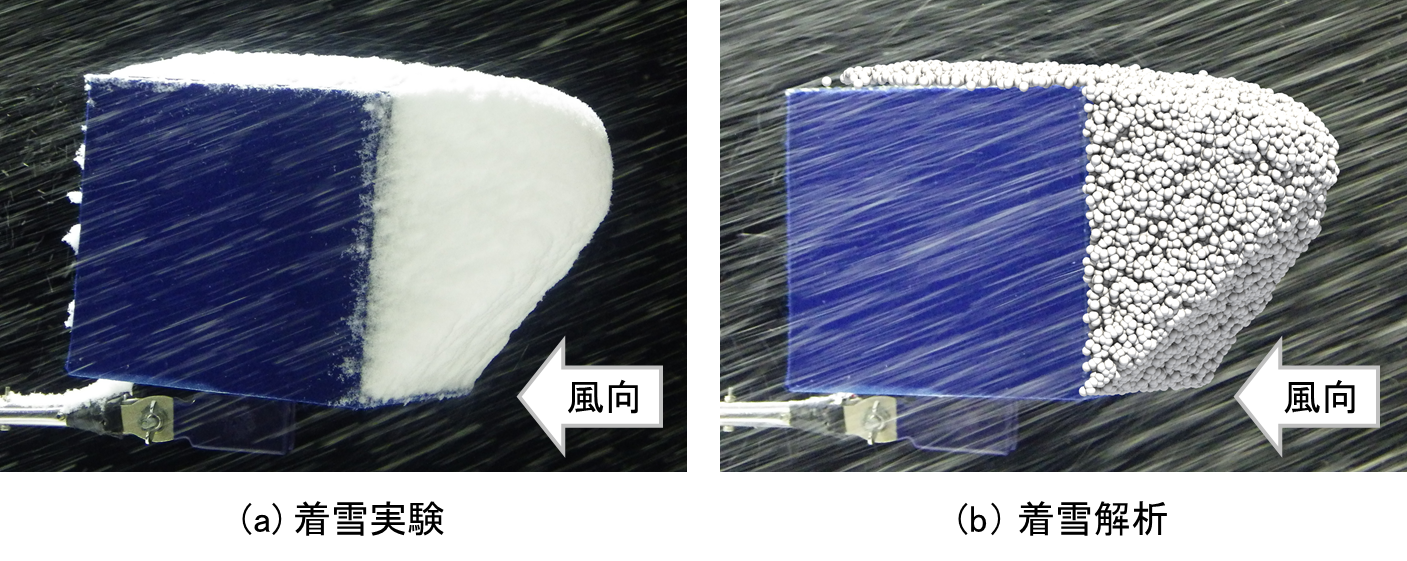
着雪解析手法の妥当性確認を行うために,降雪風洞実験を模擬した解析を行いました。図2 は,風速2.5m/s で,立方体模型の着雪解析を側面全体から見た結果です。気流計算の格子に,最小格子間隔4mm,格子点数4,296,875 の不等間隔格子を用いました。飛雪粒子の生成は,実験の天井降雪装置の降雪分布を模擬して,図2 の右上の部分に,直径4mm の飛雪粒子を発生させ,自由落下させました。その結果,飛雪粒子は,空気流に流されながら落下していき,立方体模型に衝突すると,着雪が進んでいきます。図3 は,立方体模型の着雪実験と着雪解析の結果です。これらの着雪形状を比較すると,解析は実験をおおむね再現できていることが確認できます。
4 台車模型の着雪解析
鉄道車両の台車周りの着雪状況を再現できることを確認するために,台車模型を用いた降雪風洞実験を模擬した解析を行いました。気流計算の格子に,最小格子間隔2mm,格子点数23,512,500 の不等間隔格子を用いました。飛雪粒子の生成に関しては,実験の降雪装置の降雪分布を模擬して,台車模型の前方の風速10m/s の流入口一面に,直径2mm の飛雪粒子を発生させました。
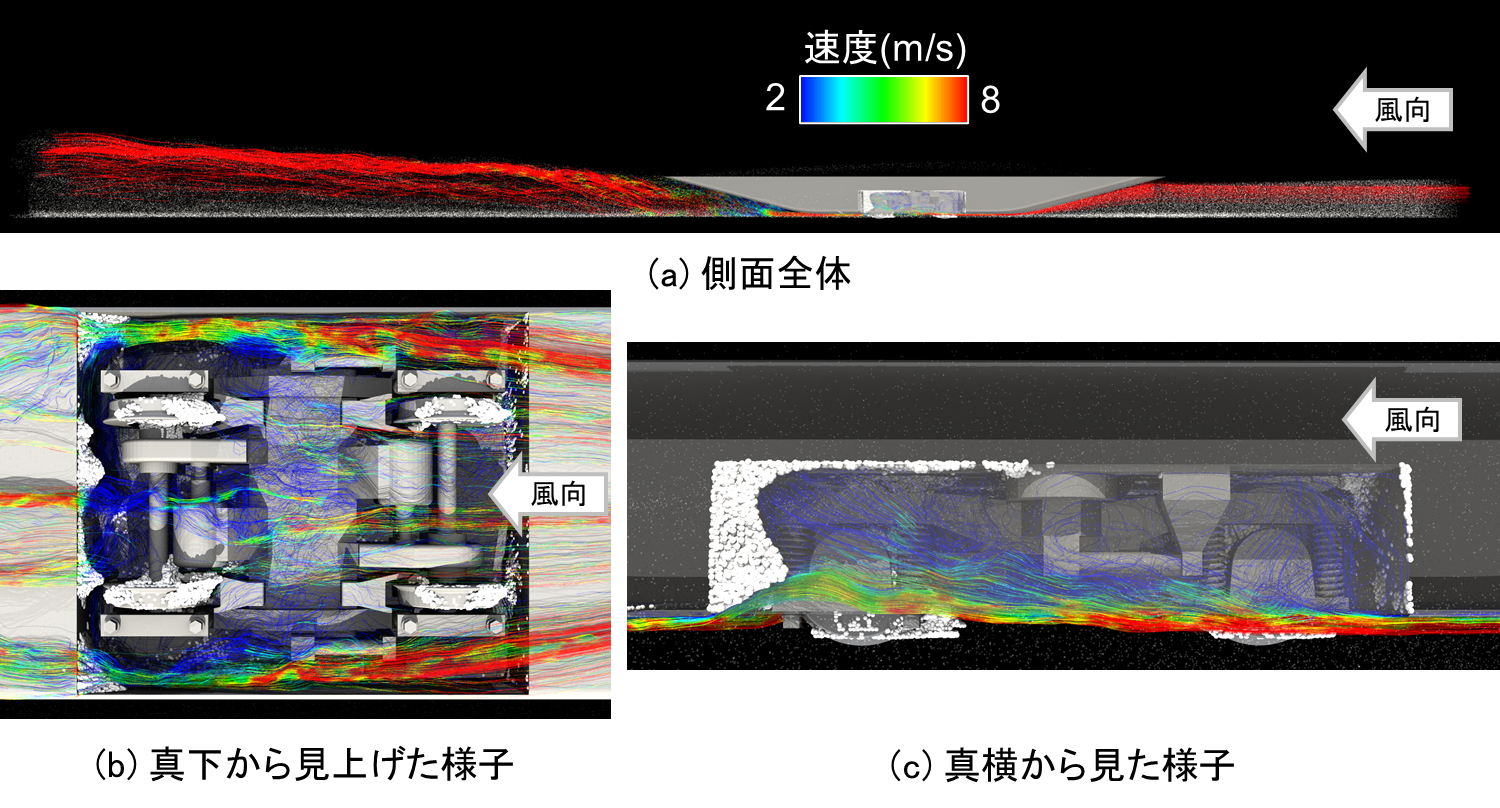
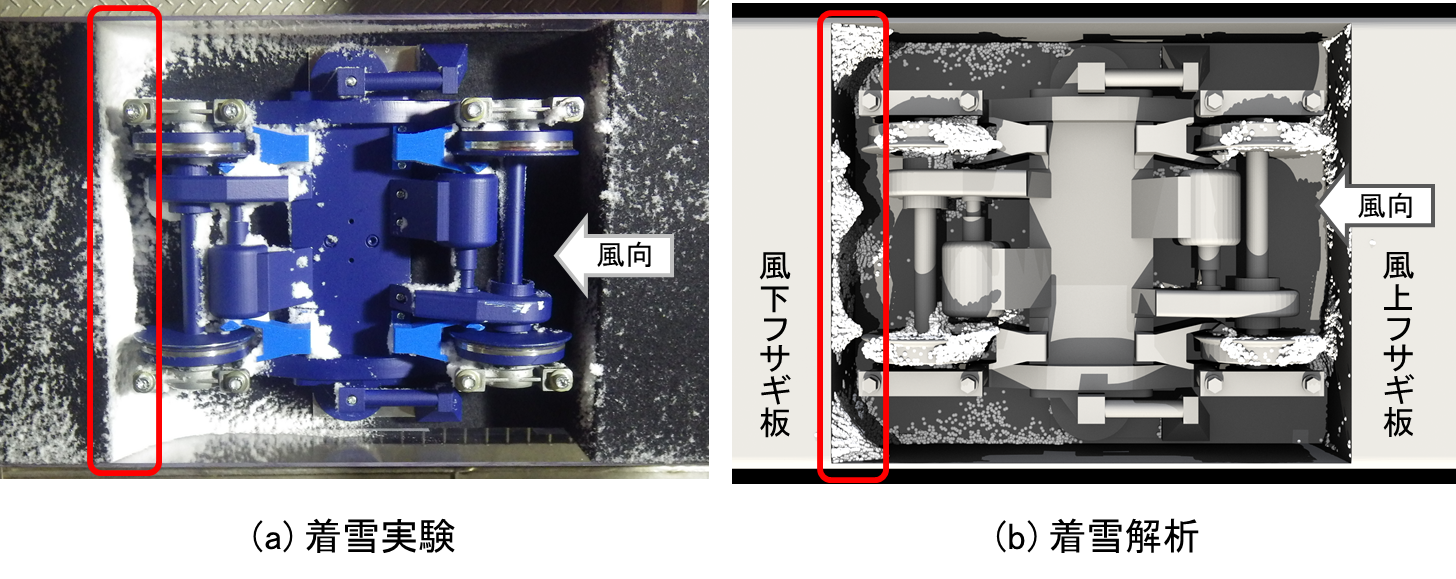
図4(a) は,降雪風洞実験を模擬した台車モデルの着雪解析全体を側面から見た結果です。前方から雪が飛んでいき,台車模型の後方に舞い上がりながら抜けていく様子がみられます。着雪が発生する場所,発生しない場所を考察するために,着雪解析の着雪状況と空気の流れを繋いだ流線を表示しました。図4(b) のように台車模型を真下からみると,風上フサギ板の付近から入ってきた流線が,風下フサギ板に着雪している付近で流れが遅くなり渦巻き,着雪していない場所から流出していることがわかります。また,図4(c) のように台車模型を真横からみると,風上フサギ板付近からきた流線が,風上側の車輪を起点にして上昇し,風下フサギ板にあたり,台車内で低速な流れが渦巻いていることがわかります。このことから,着雪が発生している場所は,台車内部で空気流の速度が遅くよどんでいる場所であり,着雪が発生していない場所は,空気流の速度が速く,台車内部から流出している場所であることがわかります。図5 は着雪実験と着雪解析の結果です。解析と実験の結果と比較すると,赤枠内のフサギ板への着雪状況だけでなく,台車付近全体の着雪状況が実験を解析で再現できていることが確認できます。
5 おわりに
本研究では,着雪成長プロセスを再現できる着雪解析手法を開発し,着雪しにくい鉄道車両形状の開発を目指しています。今後は,走行を模擬した鉄道車両モデルを開発し,実物の鉄道車両を模擬した解析が実施できるようにすることを目指しています。
参考文献
1)室谷浩平,中出孝次,鎌田慈:鉄道車両に用いる着雪シミュレータの開発(その2)─実験から導き出した着雪発達条件を用いた着雪解析手法の検証─,雪氷,83巻5 号,pp.465-487,2021
2)鎌田 慈,室谷浩平,中出孝次,高橋大介,佐藤研吾,根本征:鉄道車両に用いる着雪シミュレータの開発(その1)─実験による着雪発達条件の検討─,雪氷,83巻1 号,pp.79-96,2021
鉄道力学研究部 計算力学 主任研究員 室谷 浩平