電力ニュース
2021年4月号
気象条件についての調査
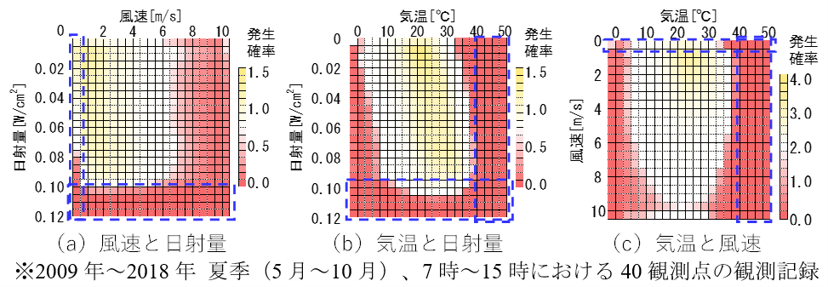
き電線の温度上昇の設計では、気温、日射量、風速といった気象条件を加味した計算を行います。これら気象条件の一例として気温40℃、日射量0.1W/cm2、風速0.5m/s(ここでは、設計条件と呼ぶ)が用いられます。図1に気象観測記録のクロス集計表を示しますが、破線内の観測記録は、気温、日射量、風速のいずれか1項目が設計条件より悪条件となります。なお、設計条件の3項目が同時に悪条件となる観測記録はありませんでした。この設計条件のいずれか1項目が悪条件となる気象観測記録の影響について確認した結果を報告します。
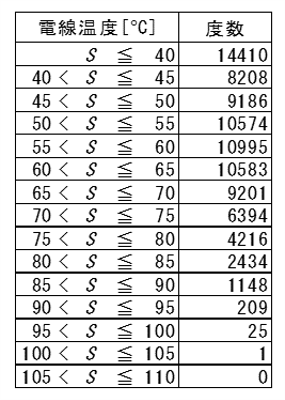
表1に、2009年4月~2019年3月まで10年間の奈良で観測された各気象条件の組み合わせを用いて、連続許容電流が通電している電線の温度を算出した結果を示します。なお、電線は硬銅より線(H325)とし、連続許容電流は、気温40℃・日射量0.1W/cm2・風速0.5 m/s・電線の連続許容温度100℃における値として994Aとしました。このケースでは電線温度が連続許容温度100℃を超過することがあることがわかります。電線の連続許容温度は、熱履歴による電線の強度低下率が10%を超えない値として定められたものです1)。そこで、奈良を含む40観測点について、同様に10年分の電線の温度分布を求め、その温度分布を電線の熱履歴として考え、6倍することで硬銅より線の耐用期間(60年)経過後の電線の強度低下率を求めました。なお、硬銅より線の強度低下率W(%)は、ln(W)=(0.0793×S-9.948)+0.663×ln(T)(S:軟化温度(℃)、T:軟化時間(hrs))により算出しました1)。
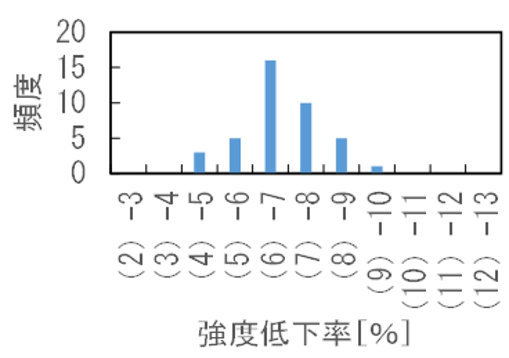
図2に40観測点で算出した電線の強度低下率分布を示します。耐用期間60年に対する電線の強度低下率はいずれも10%以下であり、電線の連続許容温度の前提条件(熱履歴による強度低下率が10%を超えない)を満たす結果となりました。このことから、連続許容温度を超過する気象条件の組み合わせが存在するものの、近年の気象条件においても「気温40℃、日射量0.1W/cm2、風速0.5m/s」の条件で電線の温度計算をすることは妥当と考えられます。
〔参考文献〕
- 電気学会、架空送電線の電流容量、電気学会技術報告、Vol.660、1997
トロリ線とすり板の機械的な摩耗形態と摩耗面の分類
実フィールドにおけるトロリ線の摩耗面の状態には、場所によって違いが見られます。これは、パンタグラフの接触力や走行速度、集電電流などの条件が異なることで、摩耗の形態が異なるためと考えられます。トロリ線の摩耗形態と摩耗面の関係を把握することは、実フィールドにおける摩耗の原因究明や対策提案のためにも有効と考えます。本稿では、トロリ線とすり板の摩耗形態、特にパンタグラフの接触力が十分にあり電流の影響の小さい摩耗(機械的な摩耗と呼称)の形態と摩耗面との関係を紹介します。
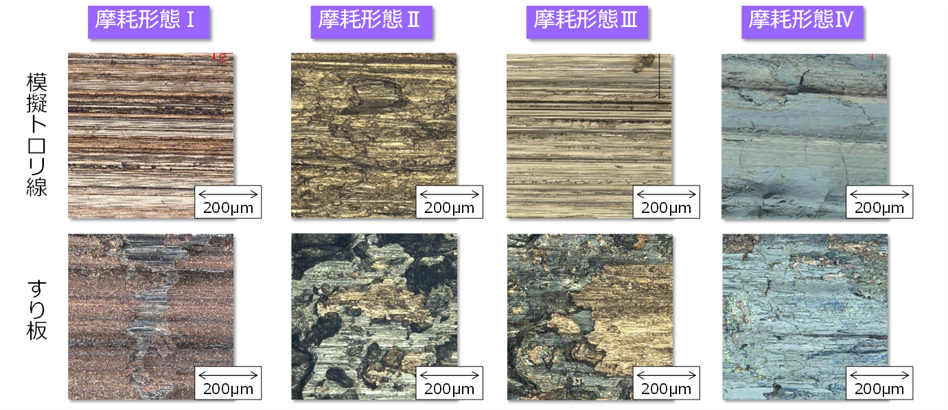
しゅう動中の模擬トロリ線と鉄系焼結合金すり板の接点温度を精密に測定可能な摩耗試験機を用いて、摩擦熱によって上昇する接点温度と摩耗形態の関係を調査しました。その結果、機械的な摩耗には以下に示す4種類の形態が存在し、摩耗面も4種類に分類できることが明らかになりました(図1)。
摩耗形態Ⅰ:接触面の接点同士が結合する「凝着」に起因する摩耗。約20km/h以下の低速域で接点 温度が低く、トロリ線もすり板も軟化しない場合に発生する。トロリ線とすり板の摩耗面はどちらも滑らかになる。
摩耗形態Ⅱ:トロリ線の接点が大きく塑性変形することに起因する摩耗。約20km/h以下の低速域で トロリ線もすり板も軟化しないが、接触面が荒れている場合に発生する。トロリ線の摩耗面はむしられたように荒れており、すり板の摩耗面には銅が移着する。
摩耗形態Ⅲ:熱で軟化したトロリ線表面を軟化していないすり板が削る摩耗。30~60km/hの速度域で接点温度が上昇し、トロリ線のみが軟化する条件で発生する。トロリ線の摩耗面は滑らかになり、すり板の摩耗面には削られた銅が移着する。
摩耗形態Ⅳ:軟化したトロリ線とすり板の接点が流動する摩耗。約80km/h以上の高速域で接点温度がさらに上昇し、トロリ線とすり板がともに軟化する場合に発生する。トロリ線の摩耗面は滑らかになり、鉄が移着することで黒色化する。すり板の摩耗面も滑らかで黒色化し、表面がしゅう動方向に流動する。
ここで、模擬トロリ線の軟化温度は約200℃、鉄系焼結合金すり板の軟化温度は約400℃です。
摩耗形態の変化は接点温度に起因することが明らかとなりましたが、実フィールドにおいて接点温度を精密に測定することはできません。そこで、今後は接触力や走行速度、集電電流などの条件から接点温度を推定し、接点温度を測定しなくとも摩耗形態を予測可能にする研究に取り組む予定です。
直流電気鉄道の磁界下におけるドローンの挙動調査について
災害など異常事態の現地確認や各種電力設備の保守省力化のため、ドローン(無人航空機)を用いた点検が各社で検討されています。ドローンはさまざまな内蔵センサにより飛行姿勢の制御を行っています。このうちコンパスは地磁気を検知してドローンが現在向いている方向を調べるために使われていると考えられ、周囲の磁界が乱れるとコンパスに異常をきたし、ドローンが墜落する懸念があります。
直流電気鉄道に生じる磁界として、日中の営業運転時は通電電流によるもの、また、夜間の停電時は電化柱やビーム等、鋼製の電車線路構造物に営業運転時の通電電流などが作用して生じる残留磁界(着磁)があります。一方、現状ではドローンが周囲の直流磁界に対して耐えられる基準を定めた規格は国内外に存在しません。そこで、市販されている総重量が200g未満のドローン2機種(ドローンA、ドローンB)に対し、直流磁界を加えたときの挙動を調べる実験を行いました。
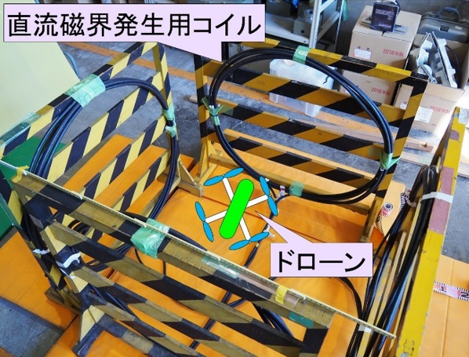
はじめに、ドローンのコントローラにコンパスエラーを出力する最低の直流磁束密度を調査しました。ドローンは図1の中心部に静止させた状態で直流磁界を加えました。表1に結果を示します。各ドローンがコンパスエラーを出力した磁束密度は、特に鉛直方向で製品間に大きな差が認められました。特に製品Bの鉛直方向における最低の磁束密度は5µTであり、東西や南北方向に比べて低い磁束密度でコンパスエラーを出力しました。ただし、この状態でも各ドローンは離陸できました。
次に直流磁界を加えた状態でのドローンの挙動を確認するため、図1の環境下で製品Aと製品Bをホバリングさせました。表2に結果を示します。製品Aは東西、鉛直方向ともに10µTになると水平にゆっくりと回転し、制御が困難になりました。特に鉛直方向の耐磁性は表1にある451µTと比べて大幅に低い値で回転することが分かりました。なお、10µTという値は10000A流れている電線から約32m離れた点での磁束密度と同等です。一方、製品Bは直流磁界を加えても、コンパスエラーを表示するものの安定してホバリングできました。そこで、ドローンBに対してはより高い磁束密度での試験として、ホバリングさせたドローンから0.3m離れた位置にある電線に7600Aを通電(投入)しました。このときのホバリングさせた点の推定磁束密度は数千µTです。結果、ドローンBはコンパスエラーがコントローラに表示されただけで安定してホバリングを継続していました。ドローンBは、姿勢制御にコンパス以外の要素も使用し、安定した飛行を実現させていたものと考えています。
以上のまとめとして、安全側の基準としては10µT以下の磁束密度で飛行させることが妥当と考えられること、機種により周囲の磁界の影響を受けやすいものと受けにくいものがあることが判明しました。そのため、飛行の際にはドローンの機種毎の仕様を基に、飛行範囲を慎重に検討する必要があります。

高速パンタグラフ試験装置の概要
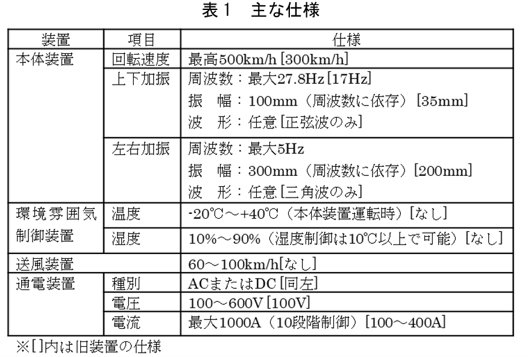
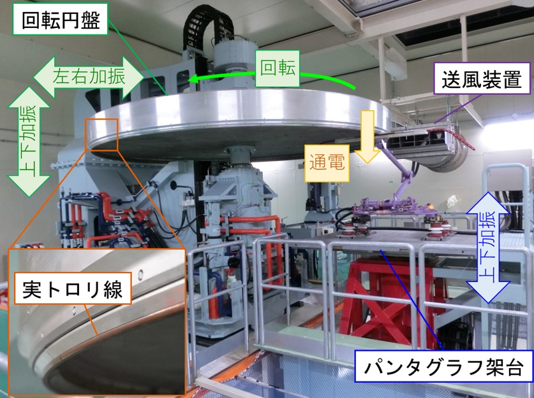
鉄道総研には、パンタグラフの性能を評価する試験装置として「パンタグラフ総合試験装置1)(以下、旧装置)がありましたが、性能が陳腐化していたこと、老朽化(経年43年)していたことから、機能を向上させた「高速パンタグラフ試験装置」(以下、本装置)を新たに製作しました。本装置の主な仕様を表1に、構成を図1にそれぞれ示します。
本装置は旧装置に比べて回転速度を向上させるとともに、高速走行時のハンガの到来周期と電車線偏位を再現するために、上下加振と左右加振の性能も向上させています。また、新幹線のパンタグラフ1基あたりの集電電流に対応できるように通電電流を最大1000Aに、離線時のアークが継続するように通電電圧を600Vにそれぞれ向上させています。さらに、旧装置にはない装置として、試験室内の温度および湿度を制御する環境雰囲気制御装置、走行時の気流による舟体の冷却を模擬するための送風装置を具備しています。なお、旧装置ではトロリ線を純銅製の銅板で代用していましたが、本装置では実トロリ線を取り付けて試験を行います。
本装置の活用例を以下に示します。
・ パンタグラフの性能評価:高速走行時のトロリ線の運動を再現して、パンタグラフの追随性を評価
・ パンタグラフの開発:アクティブ制御パンタグラフなどの新幹線用パンタグラフの開発
・ すり板の開発:トロリ線とパンタグラフすり板の摩耗現象の解明、パンタグラフすり板の性能評価や寿命延伸に向けた材料評価
・ 故障の原因究明:パンタグラフの故障原因の究明や不具合対策の提案
本装置を十分に活用し、これまでの試験装置では再現が困難であった課題に挑戦していく所存です。
なお、動画を掲載した弊社Webサイト2)もご覧いただければ幸いです。
〔参考文献〕
- 小山達弥:パンタグラフ総合試験装置、RRR、Vol.74、No.10、p.40、2017年
- https://www.rtri.or.jp/rd/division/rd50/rd5020/rd50200204.html
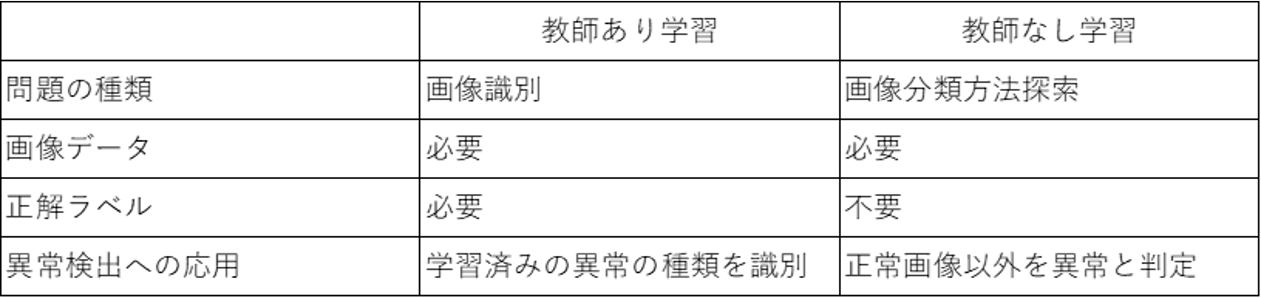
【ワンポイント講座】教師あり学習と教師なし学習(機械学習)
人工知能(AI)の普及は、私たちの暮らしに大きな変革をもたらしています。ここでは、人工知能の一種である機械学習を紹介するとともに、代表的な2つの手法について、電車線の画像処理への適用を例に解説します。
機械学習は、計算機が事前に与えられたデータから学習し、問題を解決する技術です。ここで学習とは、あるデータをアルゴリズムに与えたときに、得られた計算結果が所望の結果と一致するように、アルゴリズムの途中の計算式の係数を修正することです。多くのデータについて学習を進めることで、計算の精度を向上させることができます。この機械学習は、学習を進める手法によって数種類に分類され、そのなかに教師あり学習と教師なし学習が含まれています。
教師あり学習は、正解ラベルが付加されたデータを与え、学習させるものです。例えば、電車線金具の画像にその金具の種類の情報(正解ラベル)を付加したデータを教材として用いて学習させると、ラベルが付加されていない電車線金具の画像が与えられたときに、その金具が何であるかを識別できるようになります。教師あり学習は、このような画像に写っているものを識別したい場合によく使用されます。しかし学習用の教材を用意するために、大量の画像に対してラベルを付ける作業をしなければなりません。また、異常検出が目的の場合には、異常の種類を識別することが可能ですが、そのためには異常な状態のデータを大量に用意して学習させる必要があります。
教師なし学習は、正解ラベルのないデータを与え、学習させるものです。例えば、ハンガ、コネクタの画像を1000枚ずつアルゴリズムに与え、これらを2つのグループに分類するよう指示します。このとき、どの画像がどちらの金具なのかという情報は与えられません。アルゴリズムは与えられた画像の特徴を抽出し、それらを二つのグループに分類するような境界を決定し、ハンガとコネクタを区別できるようになります。教師なし学習は、このような画像をグループに分類する方法を探したい場合によく使用されます。また、教師なし学習を応用すると、大量に用意した正常状態のデータの特徴を計算機に学習させることで、正常ではないデータが与えられたときにこれを異常と判定する、という使い方も可能になります。
このように、機械学習は目的に応じて適切に手法を使い分ける必要があります。ただし、どちらの場合においても、計算機が統計的に特徴を抽出できるだけの大量のデータが必要になります。さらに、ノイズの少ない良質なデータ(教材)を用意し、着目して欲しい特徴を際立たせるような前処理手法を考えるなど、電車線の構造や異常に詳しい人間の役割も重要です。鉄道総研では、これらを念頭に、教師あり学習と教師なし学習を組み合わせ、画像処理により電車線金具の異常検出を自動化する手法の開発に取り組んでいます。