施設研究ニュース
2021年1月号
浮きまくらぎの検出手法
1.はじめに
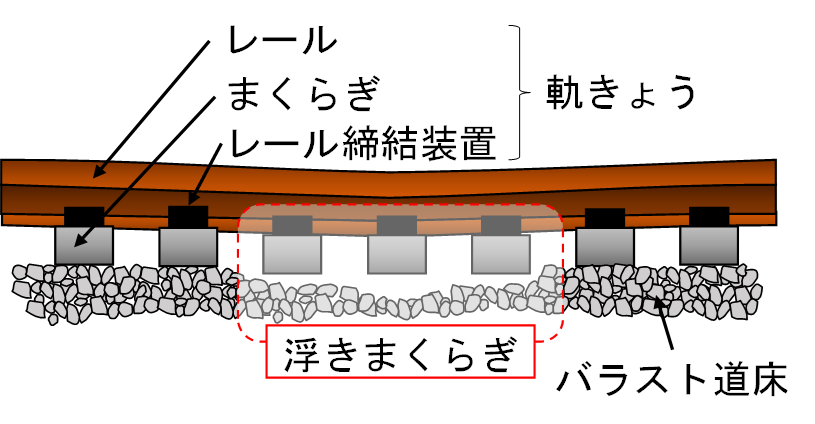
バラスト軌道では,日々の列車運行によりバラスト道床を構成する砕石が崩れ,軌道沈下が発生します.沈下量が特に大きくなる箇所では,図1のようにまくらぎがバラスト道床から離れて,レールにぶら下がった「浮きまくらぎ」が生じます.浮きまくらぎ発生箇所では,列車通過時にバラストがまくらぎにたたかれて砕石が破砕したり,道床表面に噴泥が発生するため,軌道状態が急速に悪化します.また,浮きまくらぎ発生箇所では,バラスト道床とまくらぎ間の摩擦力が喪失することで道床抵抗力が低下するため,図2のように軌きょう座屈に対する安全余裕度が低下します.そのため,浮きまくらぎを的確に把握し,適切に対処することが重要ですが,これまで浮きまくらぎを車上データから定量的に把握する手法は確立されていませんでした.そこで鉄道総研では,簡易に浮きまくらぎを検出できる「浮きまくらぎ検出手法1)」を開発しましたので本稿で紹介します.

2.浮きまくらぎの検出手法
本手法は,バラスト道床上面のレール長手方向の凹凸形状(道床面形状)を把握したうえで,道床面形状をもとに数値計算により軌きょうの形状を推定し,両形状の差分を算出して浮きまくらぎ発生箇所を検出する手法です.
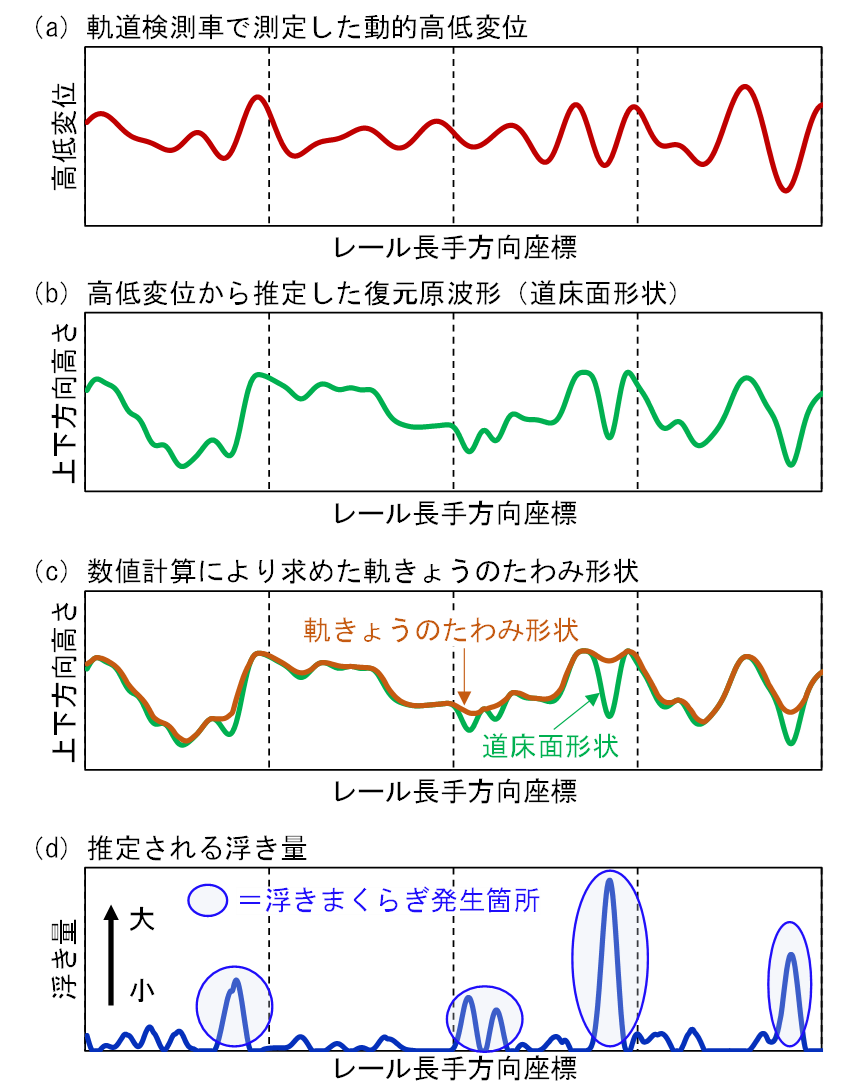
図3に浮きまくらぎ検出のメカニズムを示します.まず道床面形状については,軌道検測車で測定した高低変位データ(動的高低変位,図3(a))を所定の波長帯域においてデジタル逆フィルタで処理した復元原波形(図3(b))で推定します.軌道上を列車が通過している間は,浮きまくらぎの有無によらず,軌きょうが車両荷重により押し下げられ,まくらぎがバラスト道床と接触している状態になります.レールなど軌道部材の種別が同一ならば,レール上面からまくらぎ下面までの距離(軌きょうの厚み)はレール長手方向でみるとほぼ変化しません.すなわち動的高低変位は本来,レールの上下方向のゆがみを表すものですが,軌きょうの厚みを差し引けば,道床面の凹凸を表すものとしても捉えることができます.よって,動的高低変位から得た復元原波形を道床面形状と考えることができます.
次に軌きょうの形状(図3(c))を推定します.ここではバラスト道床の上に軌きょうを設置することを考えます.すると軌きょうは道床面形状に応じて,その自重によりバラスト道床上でたわみます.まくらぎを介してバラスト道床に軌きょうの自重が加わると,その反作用として弾性を有する道床・路盤から軌きょうに対してばね反力が加わります.各まくらぎ位置において発生するばね反力の合計と軌きょうの自重がつり合う時,軌きょうは構造的に安定状態となるので,そのつり合い条件をまくらぎ間隔と軌きょうの剛性を考慮した数値計算により求めると,軌きょうのたわみ形状が一意に決まります.
以上より道床面形状と軌きょうのたわみ形状が分かるので,両形状の差分を算出すれば,各まくらぎ位置においてまくらぎがバラスト道床からどの程度離れているかを表す浮き量(図3(d))が求まります.この浮き量や浮きまくらぎが発生している範囲から,現場の浮きまくらぎの程度を判断することができます.
3.営業線における妥当性の検証
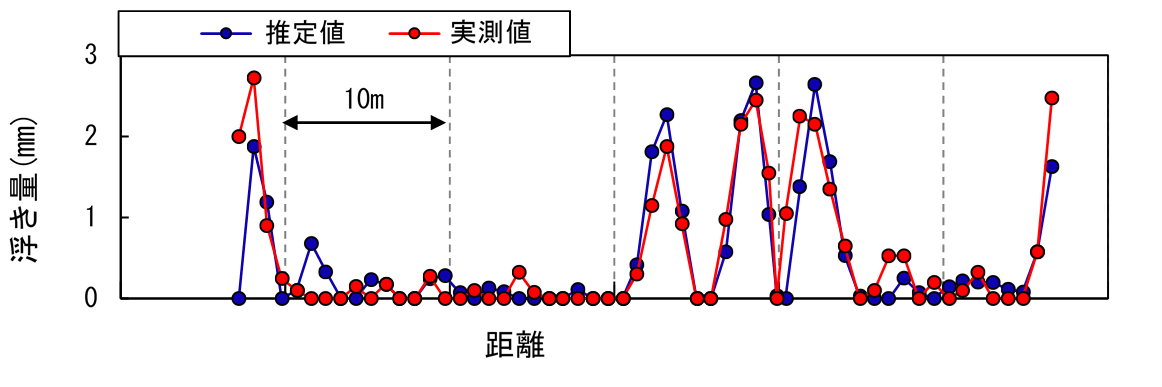
ここでは開発した浮きまくらぎ検出手法を,営業線のロングレール区間に適用した事例を紹介致します.図4に,浮きまくらぎ検出手法で推定した浮き量の推定値(青)と,実測値の結果(赤)を示します.なお,検出手法で用いた復元原波形は,軌道検測車の仕様である2.1m-14.4m偏心矢法で測定された高低変位データを,浮きまくらぎ箇所で発生する動的高低変位に対して,検測倍率が確保される波長帯域3~50mのデジタル逆フィルタで処理することにより得ました.また,浮き量の実測値は,レール締結装置を取り外してまくらぎをバラスト道床上に落とし,まくらぎとバラスト道床が接触したときに,レール底面とまくらぎ上面に生じるすき間を測定することで取得しました.同図から推定値と実測値が概ね合致するという良好な結果が得られました.この結果から,浮きまくらぎ検出手法の妥当性を確認することができました.
4.LABOCSへの導入
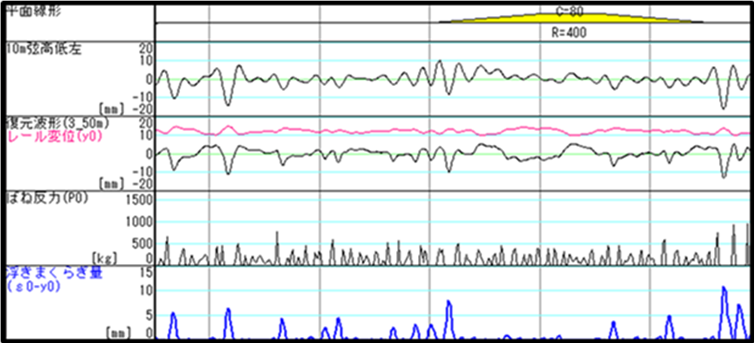
本稿で紹介しました浮きまくらぎ検出手法は,軌道保守管理データベースLABOCS2) Ver.4.2に搭載され実用化される予定となっています.図5にLABOCS上で浮き量を出力した一例(下段の青プロット)を示します.この機能により軌道上に存在する浮きまくらぎを的確に把握し,効率的に対処することが可能になると考えられます.
5.おわりに
今回は,浮きまくらぎを精度よく検出する手法について紹介しました.今後は本手法を活用し,未解明な部分の多い浮きまくらぎに関する有用な知見を蓄積していく予定です.
参考文献
- 1) 楠田将之:浮きまくらぎ検出手法の開発,日本鉄道施設協会誌,Vol.57, No.5, pp.38-41, 2020
- 2) LABOCSポータルサイト
執筆者:軌道技術研究部 軌道構造研究室 山岡大樹
担当者:軌道技術研究部 軌道構造研究室(現:JR西日本 鉄道本部施設部施設技術室) 楠田将之
架線着霜発生予測プログラムの開発
1.はじめに
気温が低く,かつ相対湿度が高い冬の晴れた夜間には電車線(架線)に霜が付着し,成長することがあります.このような着霜が発生した区間を電車が走行すると,パンタグラフと架線との間に介在する霜により離線が発生し,これに伴うアーク放電のためにパンタグラフが損傷したり,集電障害による列車遅延の原因となることがあります.こうした障害の低減対策として,霜取りカッターや無集電パンタグラフを搭載した『霜取り列車』と呼ばれる臨時列車の早朝運行等が行われています.これらの対策を効率的に行うためには,架線着霜の発生予測が重要となります.現状では,地域ごとの過去の架線着霜発生日の気温,湿度,風速,天気等の気象条件の記録から経験的に霜の発生を予測して,これらの対策を実施していますが,予測精度にばらつきが大きいため,より簡便で精度の高い架線着霜の予測手法が求められていました.そこで,霜の発生メカニズムに基づいて,観測機器を設置することなく翌朝の架線着霜の発生を精度よくかつ簡便に予測する架線着霜発生予測プログラムを開発しました.
2.霜の発生メカニズムと架線着霜発生日の特徴
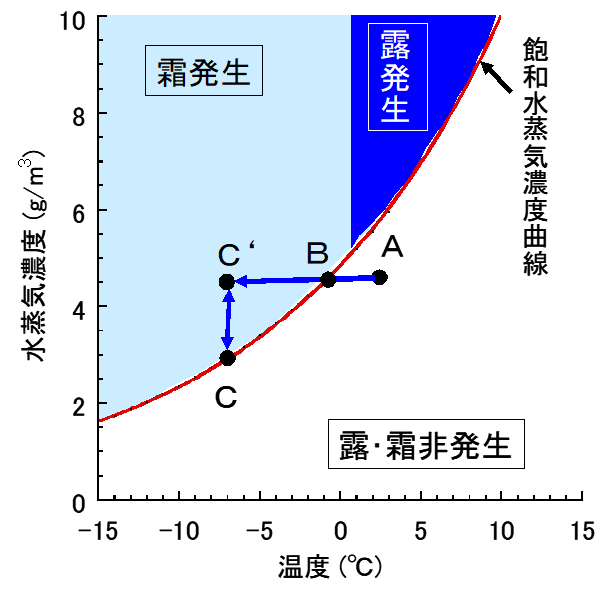
夏にコップに冷水を注ぐと,コップの表面には結露が生じます.これは,冷水で冷やされたコップの表面温度が露点温度に達して空気中の水蒸気がコップ表面に凝結するためです.架線に発生する霜についても,これと同様のメカニズムで発生します.つまり,放射冷却の影響で架線表面温度が霜点温度以下となり,空気中の水蒸気が凝結して霜が発生します.このように,架線着霜の発生メカニズムを知る上では,架線近傍の水蒸気に注目する必要があります.一般に,ある温度の水蒸気濃度(単位体積あたりの空気に含まれる水蒸気量)には上限値があり,これは飽和水蒸気濃度と呼ばれ,各温度での湿度100%に対応します(図1).霜または露は水蒸気濃度が飽和に達した時点(図中の点B:霜点温度もしくは露点温度)から発生するため,飽和水蒸気濃度曲線をはさんで左上は水蒸気濃度が過飽和となって霜または露が発生する領域,右下は水蒸気濃度が未飽和のため霜または露が発生しない領域を示します.霜または露は過飽和分の水蒸気(図中の点C’と点Cとの差)が凝結して発生します.
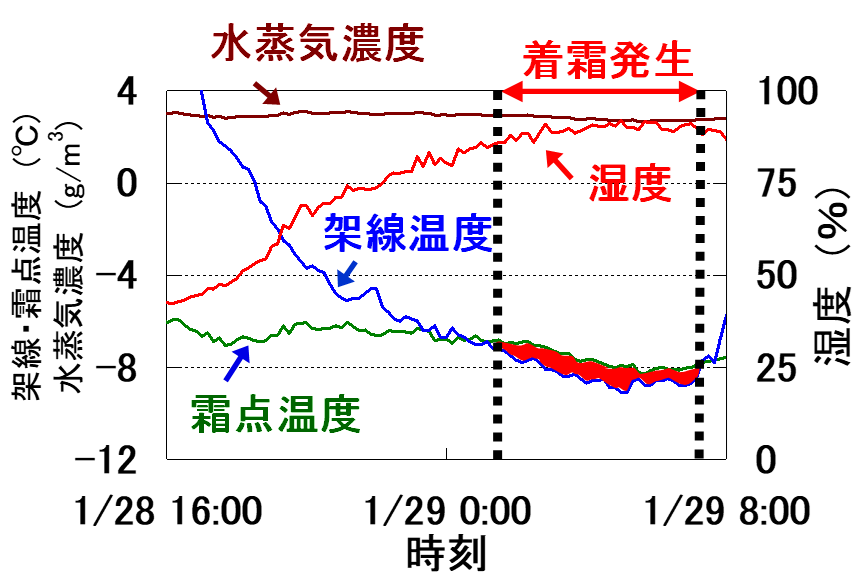
観測期間の典型的な架線着霜発生日について,気温と湿度から水蒸気濃度を計算し,架線着霜の発生状況と比較しました(図2).その結果,晴れた夜間のように放射冷却が強い日は,霜点温度よりも架線温度が低くなって架線表面付近の水蒸気が過飽和となる時間帯と架線着霜が観察された時間帯が一致しています.このことから,架線着霜も霜の発生メカニズムに基づいていることがわかります.また,水蒸気濃度の変化を見ると,前日夕方から水蒸気濃度はほぼ一定であることがわかります.このような特徴は架線着霜の発生予測を行う上で重要となります.
3.架線着霜発生予測プログラム
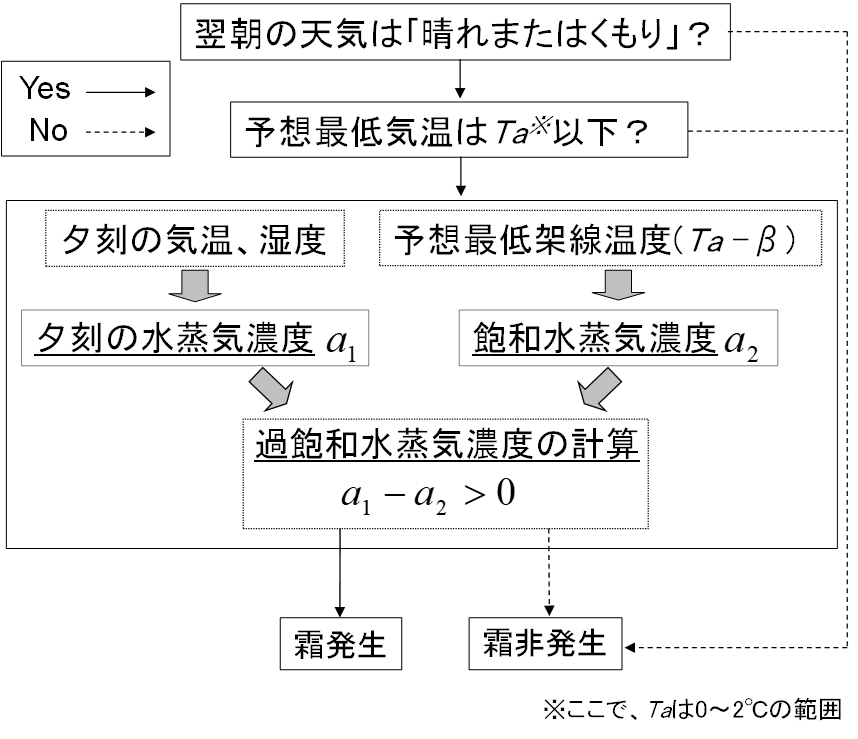
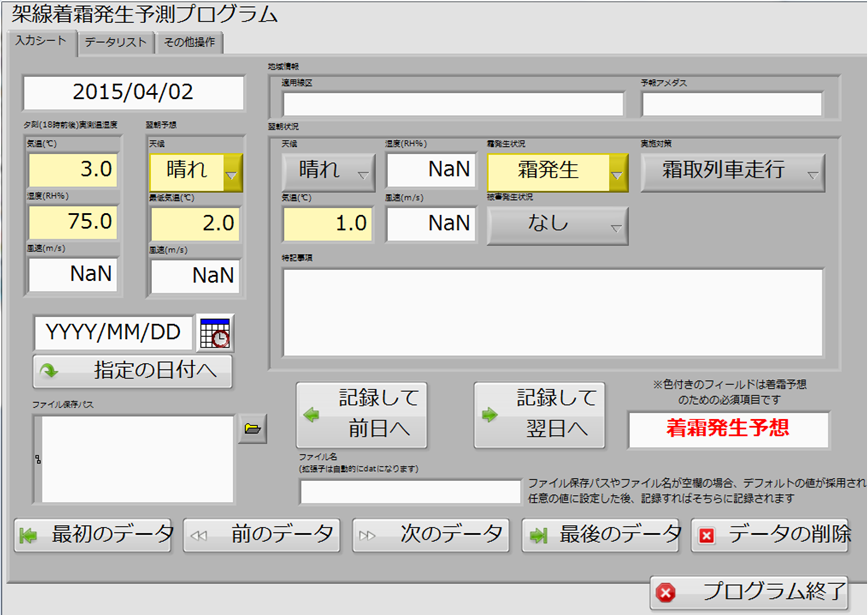
架線着霜の予測手法(図3)では,天気予報から①放射冷却が起こるような「晴れまたはくもり」の天気となるか?,②予想最低気温は架線着霜が発生する気温Ta℃以下となるか?,そして,③水蒸気濃度が過飽和となるか?の3段階で架線着霜の発生の有無を予測します.ここで,夕刻の水蒸気濃度a1は,気温と湿度から計算可能であり,翌朝まで変化しないことを仮定しています.架線温度は放射冷却によって予想最低気温よりもβ℃低くなっていると仮定し,この予想最低架線温度に対する飽和水蒸気濃度a2を求めます.従来の予測手法では,天気,気温の他,湿度,風速などの予報値が必要ですが,本手法に必要な入力要素は,夕刻の気温と湿度の実測値,翌朝の天気と予想最低気温の予報値の4つのみです.この予測手法をWindows PCで動作する「架線着霜発生予測プログラム」としてまとめました(図4).
観測期間中のデータを用いて,的中率,見逃し率,空振り率により予測精度を検証しました.天気予報が100%的中したと仮定して,架線着霜発生予測フローの①と②に観測値を用いた場合,的中率は約90%となり,気象予報値が得られた85日間について検証した結果,的中率は約70%となることを確認しました.
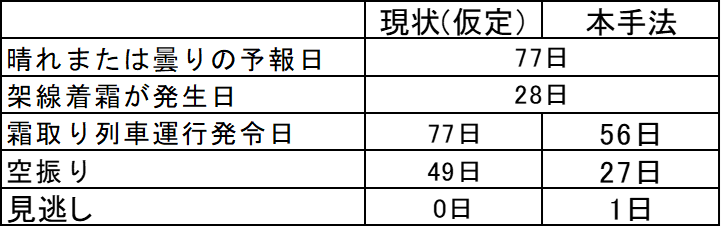
冬期の晴れまたは曇りの日(77日)の早朝すべてに霜取り列車を運行しているような線区において試算してみると,従来,空振りの日が50日程度含まれ,的中率は約40%となります(表1).一方,本予測手法を適用することで,見逃しは1日含まれるものの,的中率が向上し,空振りの約6割を削減できることが期待できます.
さらに,アメダスなどの気象観測点と架線着霜が発生する地点が離れている場合,気象データに乖離が生じて精度が低くなる恐れがありますが,本プログラムでは,霜の発生の実況データを記録して予測結果と比較することで,的中率が高くなるように霜の発生判定に影響するパラメータTaとβを自動調整することができます.
4.おわりに
紹介した架線着霜発生予測プログラムに必要な入力情報は,一般に入手・閲覧が可能な気象情報のみであることから,新たに観測点を設ける必要が無く,保守費用も不要です.このため,本手法は,延長が長く,対象箇所が多数ある鉄道においても容易に導入可能であり,対策実施の効率化による業務改善,列車遅延の低減が期待できると考えられます.
執筆者:防災技術研究部 気象防災研究室 鎌田 慈
離散体シミュレーションによるタンピング作業の再現
1.シミュレーション技術の導入
古くから「鉄道は経験工学」と言われ,軌道分野の技術開発においても,実験による検証が重要視されてきました.他方,近年のコンピュータ技術の発展により,バラスト軌道の保守工法の最適化について,シミュレーション技術を用いた検証が広まりつつあります,1),2).特に解析モデルは,一度試験軌道を構築すれば何度も同じものを使えるという利点があり,実物大試験に必要なコストも抑えられます.
2.バラスト軌道の解析モデル
ところで,シミュレーションを行う上では,「何を観察したいか」によって適切なモデル化手法を選択する必要があります.
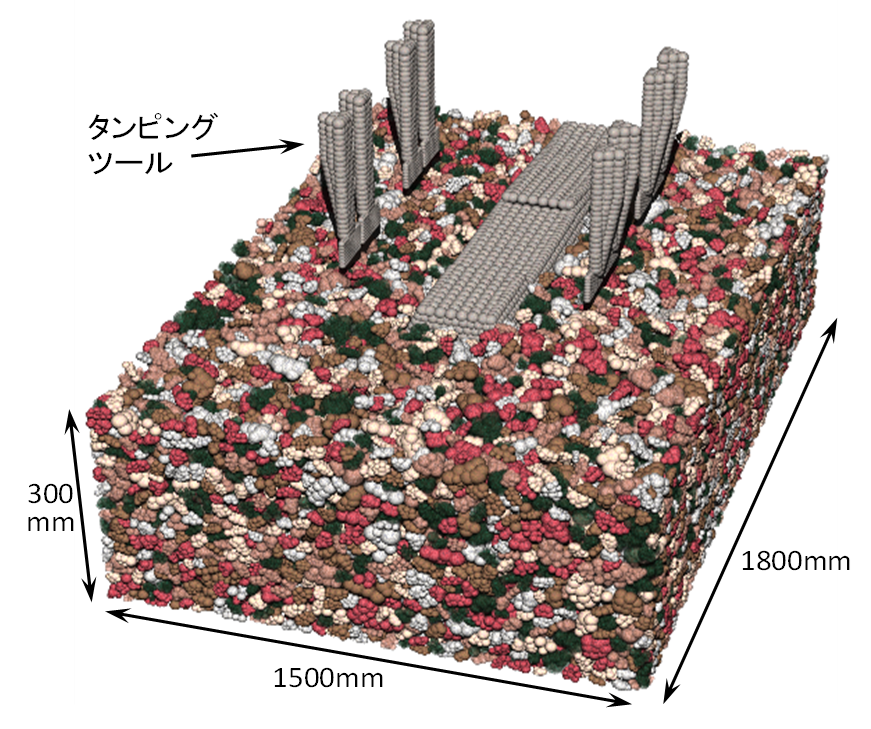
バラスト軌道の道床バラスト層は,層厚が200mm~300mmでありながら,粒径約20mm~60mmの粗粒砕石で構成されていることから,道床バラスト層の劣化や局所的な沈下の発生要因を観察したい場合,「粗粒の粒子で構成されている層」の特徴を再現できる解析モデルが適しているといえます.その観点から構築されたのが図1に示す離散体モデルで,道床バラスト層を構成するバラスト粒子一つ一つを独立した要素でモデル化しています.
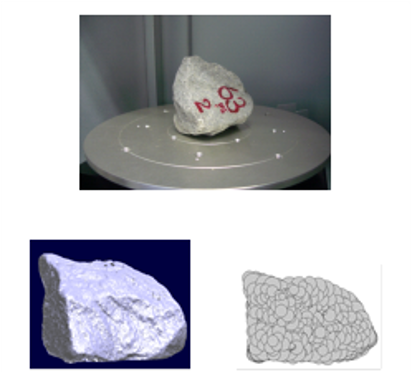
ここでバラスト粒子は複雑な形状をしているため,実際のバラスト粒子の形状をレーザスキャナで測定し,その測定値(バラスト粒子の表面の三次元座標)を用いて球集合体で模擬しています(図2).
3.タンピング作業の再現
では,マルタイによるタンピング過程を再現したシミュレーションを紹介します.
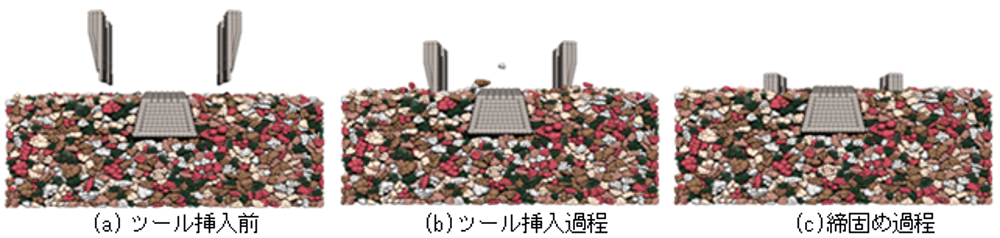
図1に示すように,バラスト層は道床厚300mmで,モデルの規模は横断面方向1800mm,縦断面方向1500mmとしました.ここで道床バラスト層の初期状態は,既往の文献3) における緩締め状態の見かけの密度を参考とし,解析モデルの見かけの密度も約1.5g/cm3 となるように調整しました.更に,まくらぎの両側に4本ずつタンピングツールを配置しました.ツールは周波数32Hzおよび50Hzで振動しながら下降し,ツールの先端がまくらぎ底面から200mmの深さに到達すると締固め過程に移行します.
図3にタンピング作業の再現シミュレーションにおける概観を示します.
4.タンピング作業中の粒子間接触力の観察
ところでタンピング作業は,軌道保守における重要かつオーソドックスな手法ですが,一方で,バラスト粒子の破砕要因の一つという見方もあります.
そこでタンピング作業の再現シミュレーション結果より,道床バラスト層内の粒子間接触力の変化を観察してみました.
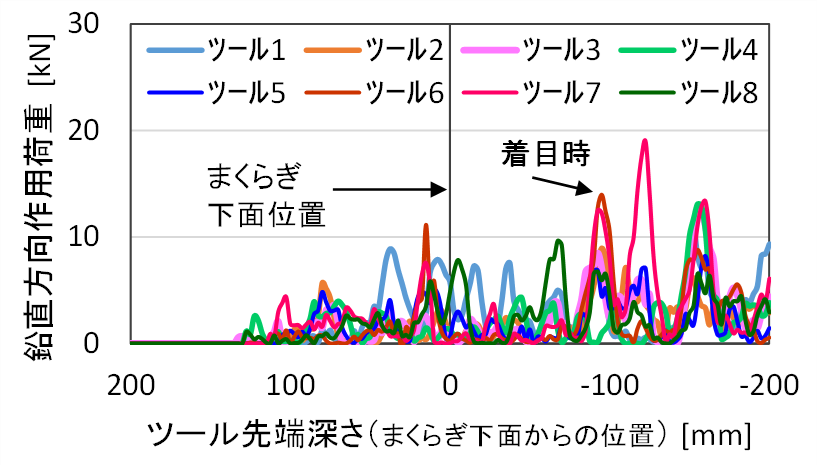
8本のタンピングツールが道床層内に下降する過程において,各ツールに作用する鉛直方向の荷重の変化を図4に示します.横軸の原点はまくらぎ下面の深さで,マイナス側はより深い位置,プラス側がより浅い位置を示します.図より,ツールに作用する荷重は増減しますが,ツールの位置が深くなるほど大きいピークを示します.
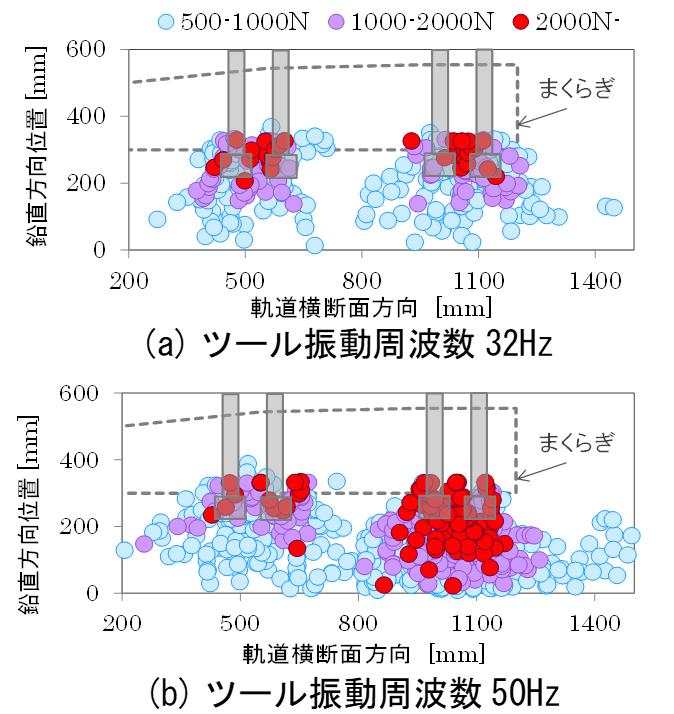
更に図4中の「着目時」の瞬間の道床バラスト層内の粒子間接触力の分布を図5に示します.図より,ツールの下降過程では,ツールの周囲で著大な粒子間接触力が発生することが,また,粒子間接触力がツールの振動の周波数によって異なることが明らかです.
5.シミュレーション技術の活用方法
以上より,シミュレーション技術を活用することで,実験での観察や測定が不可能な現象を可視化できること,また現場では再現が困難な条件下での現象を予測することが可能であることを示しました.
なお,本シミュレーションで用いた‘DEMCS-track’は筑波大学との共同研究で開発しました4).
参考文献
- 1) Saussine,G.,Azema,E.,Gautier,P.E., Peyroux,R.,Radjai,F.,”Numerical modeling of the tamping operation by Discrete element Approach, Proceedings of WCRR 2008, 2008
- 2) Kim D.S., Hwang S.H. A.Kono, T.Matsushima;Evaluation of ballast compactness during the tamping process by using an image-based 3D discrete element method, Proceedings of the Institution of Mechanical Engineers, Part F:Journal of Rail and Rapid Transit, pp.1951-1964, 2018
- 3) 須長誠:ガンマ線を用いた道床バラストの密度測定法,第28回土質工学研究発表会,pp.2383-2384,1993
- 4) 河野昭子,松島亘志:離散体モデルを用いた道床バラスト層の変形挙動解析,鉄道総研報告 Vol.28 No.12 pp.41-46 ,2014
執筆者:鉄道力学研究部 軌道力学研究室 河野昭子
発行者:小林 裕介 【(公財) 鉄道総合技術研究所 施設研究ニュース編集委員会 委員長】
編集者:三木 広志 【(公財) 鉄道総合技術研究所 構造物技術研究部 建築】