フィードフォワード制御による接触力変動の低減
1.はじめに
架線の大規模改修を行うことなく高速化を実現する手法として、パンタグラフへのアクティブ制御技術適用による接触力変動低減手法を開発しました。接触力とは、トロリ線とパンタグラフのしゅう動部材(すり板)との間に作用する内力のことで、走行速度向上に伴い変動が大きくなる傾向があります。著大な接触力変動はトロリ線やすり板の損耗を促進するため、接触力変動は極力小さくすることが必要です。
2.フィードフォワード制御による接触力変動低減手法
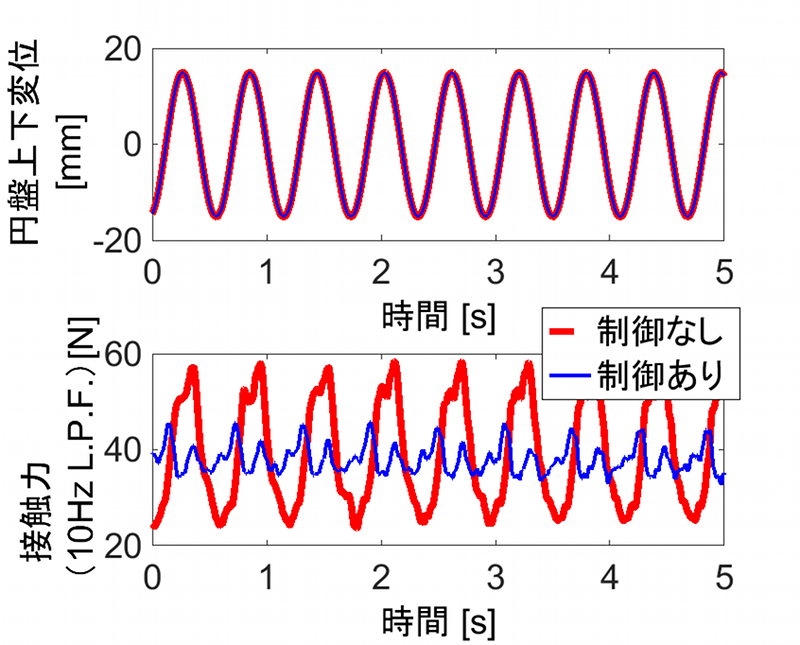
フィードフォワード制御による接触力変動低減手法をパンタグラフに適用し、パンタグラフ総合試験装置において300km/h相当の走行条件に対する模擬走行試験を実施したところ(図1および動画1)、ターゲットとしている径間周期に起因する接触力変動周波数成分を約40%低減可能であることを確認しました(図2)。
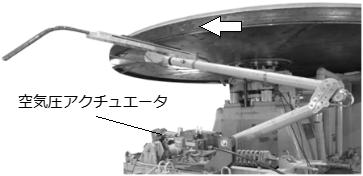
動画1 パンタグラフ総合試験装置におけるしゅう動試験の様子
※上記の動画は外部の動画サイトの埋め込みリンクです。
参考文献
- 増田新、福田一作、射場大輔、小林樹幸、山下義隆、池田充:位相同期ループに基づくパンタグラフ接触力のフィードフォワード制御(位相同期ループによる制御力生成)、日本機械学会論文集C編、Vol.80、No.815、DR0203、2014.07 (※)
- 小林樹幸、山下義隆、池田充、増田新、射場大輔:パンタグラフのアクティブ制御のための制御パラメータ最適化手法、鉄道総研報告、第27巻、第10号、pp.5-10、2013.10
(※)印のついたリンクは外部サイトへ移動します。