10. 低照度環境にも対応した車載型の線路内支障物検知手法
運転士が列車前方の線路内に支障物を発見した場合には、停止や減速などの措置を行います。
その際、列車前方の支障物を自動で検知することができれば、運転士の負担を軽減し、安全性
をさらに高めることができます。そこで、目視による前方監視を、昼夜を問わず支援するため
の線路内支障物検知手法を開発しました。
これまでに開発した手法は、カメラの画像からAI で人物や自動車を検出するもので、昼間は
300m 先の人物を95% 以上検知できますが、夜間の性能低下が課題でした。一方開発手法は、こ
れまでと同様にカメラの画像からAI で支障物を検出した結果と、レーザーの反射で物体を捉える
LiDAR の情報を組み合わせることで、夜間など低照度な環境においても支障物を検知できます。
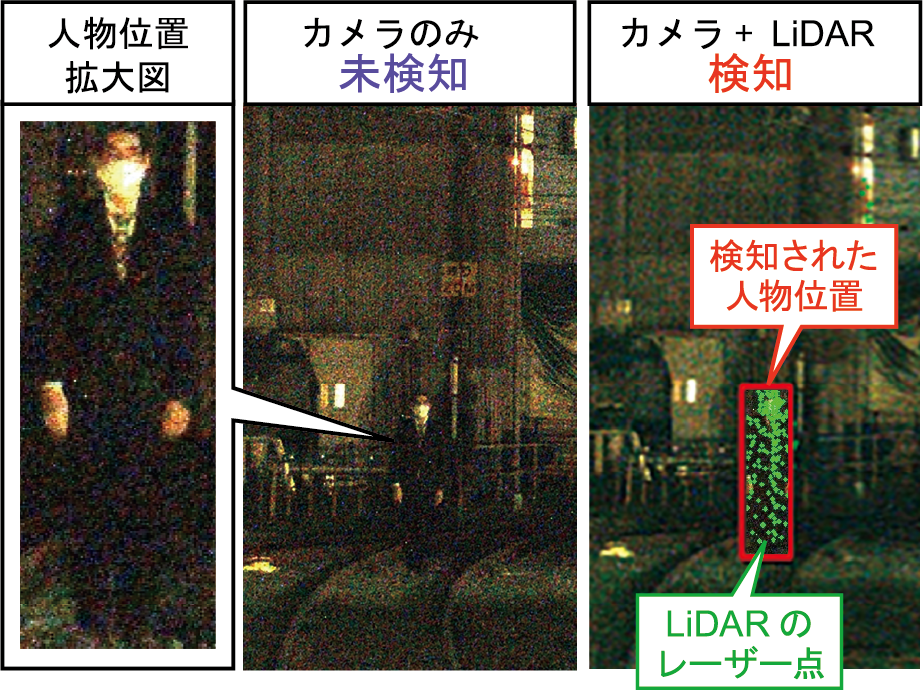
提案する手法で夜間の線路内人物を検知した例を図1 に示します。カメラのみでは検知できない
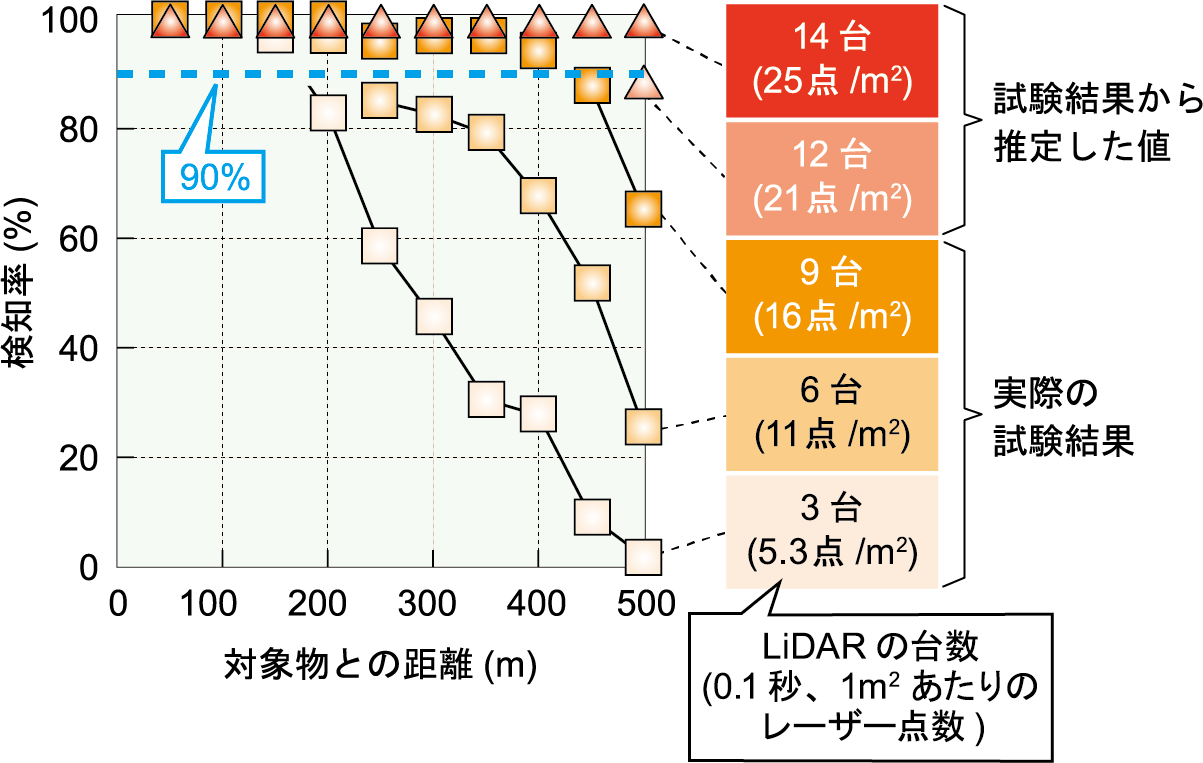
人物をLiDAR のレーザーによって検知できます。また検知に用いるLiDAR の台数を最大9 台まで
増やしながら、夜間の人物検知率を距離ごとに評価し(図2)、LiDAR を9 台用いれば、400m 先の
人物を90% 以上の確率で検出できることを確認しました。さらにLiDAR の台数を増やすと分解能
(検知距離における単位面積あたりのレーザー点数)が高くなり、14 台用いると、夜間、500m 先
でもほぼ100% の確率で人物を検知できる見通しを得ました。図2 は500m までの検証結果ですが、
今後さらに遠方までレーザーが届くLiDAR が利用可能になれば、500m 以上の距離でも、人物検
知率を高められる見通しを得ました。なお、LiDAR は小型(約10cm3)かつ安価(十数万円/台)
であるため、10 台以上併用する場合も実用的なサイズやコストに収めることができます。これら
により、鉄道事業者が支障物検知システムを導入する際に、要求性能に応じたセンサ構成を決定し、
システムを構築することが可能です。
その他の関連コンテンツ
- 9. 鉄道向け統合分析プラットフォーム
- 10. 低照度環境にも対応した車載型の線路内支障物検知手法
- 11. 車上計測した軌道変位による桁たわみ推定法
- 12. 光切断法による剛体電車線摩耗計測装置
- 13. 架線の多様な異常形態を検出可能な画像解析手法
- 14. 計画業務省力化のための乗務員運用計画の自動作成手法
- 15. 狭隘箇所における急速施工に適した盛土構造
- 16. トンネル同士が極近接する場合の影響予測解析法
- 17. 軌道等の剛性寄与を考慮した桁の振動特性の評価法
- 18. ひび割れの幅と発生位置に応じたコンクリート構造物の補修方法
- 19. 膨張コンクリートの適用による軌道スラブの低配筋化
- 20. 温度センシングによる信号用電子機器の取替時期設定手法
- 21. 防除効果および施工性に優れた蒸気を用いた雑草防除手法
- 9. 鉄道向け統合分析プラットフォーム
- 10. 低照度環境にも対応した車載型の線路内支障物検知手法
- 11. 車上計測した軌道変位による桁たわみ推定法
- 12. 光切断法による剛体電車線摩耗計測装置
- 13. 架線の多様な異常形態を検出可能な画像解析手法
- 14. 計画業務省力化のための乗務員運用計画の自動作成手法
- 15. 狭隘箇所における急速施工に適した盛土構造
- 16. トンネル同士が極近接する場合の影響予測解析法
- 17. 軌道等の剛性寄与を考慮した桁の振動特性の評価法
- 18. ひび割れの幅と発生位置に応じたコンクリート構造物の補修方法
- 19. 膨張コンクリートの適用による軌道スラブの低配筋化
- 20. 温度センシングによる信号用電子機器の取替時期設定手法
- 21. 防除効果および施工性に優れた蒸気を用いた雑草防除手法