23. 1インバータ4モータ車両用の電流差・加速度検知式空転再粘着制御
電車では、1台のインバータで複数台の主電動機を一括して駆動する主回路方式(例えば、インバータ1台で主電動機2台を駆動する「1C2M」や4台の主電動機を駆動する「1C4M」など)が広く用いられています。1C4M電車は1台のインバータで4台の主電動機を一括制御するため、1軸でも空転が発生すると4軸のトルクを引き下げて再粘着を図るため、加速性能への影響が大きくなります。
そのため、粘着力をさらに有効に利用するための、空転現象を考慮したトルク制御が求められます。
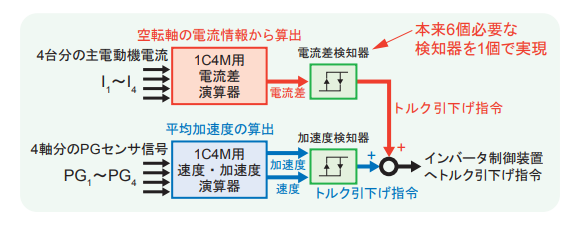
これまでに開発したけん引力向上に実績のある1C1M機関車用「加速度検知」と1C2M電車用「電流差検知」を組み合わせ(図1)、1C4M電車用に適用可能としました。
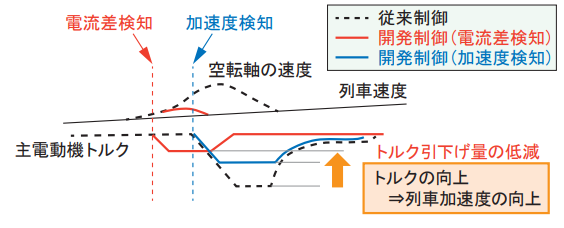
これにより、空転制御時のトルク引下げ量が低減でき(図2)、加速性能を向上できました。1C4M電車では 4 台の主電動機間の電流比較の組み合わせは6通りありますが、空転している軸の主電動機の電流は指令値に対して低下することに着目し、全軸分の主電動機の電流の低下を電流差として読み替えることで、1組の電流差検知器のみで空転の兆候を検出できる低コストな構成としました。
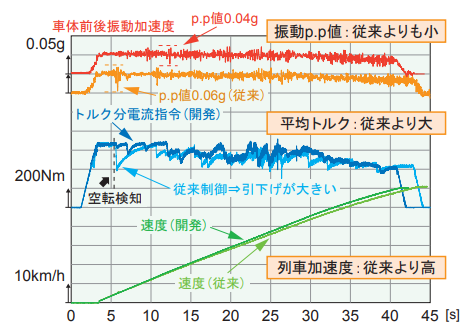
本制御方式の有効性を確認するため、近郊形電車(3M3T)を用いて検証試験を実施しました(図3)。
その結果、平均トルクを高く制御でき、列車の平均加速度は約5%向上しました。併せて乗り心地レベル(LT値)は約3dB低減し、車体前後振動の最大値も約30%低減しました。
本制御方式と先行の1C1M方式用、1C2M方式用空転再粘着制御方式により、空転再粘着制御性能の向上が在来線の9割以上の車両で適用可能となります。
また、新幹線電車についても多くが1C4M方式であることから、本制御方式を適用することで高速域での加速性能向上を期待できます。