20. 車体傾斜車両向け高精度自車位置検出システム
車体傾斜車両では、地点、速度に応じて車体を傾斜させることで優れた乗り心地を実現しています。現行の在来線の場合、その多くは ATS 地上子の位置を基準に走行位置を特定するため、車両に搭載した ATS地上子位置データベースを常に管理する必要があります。
そこで、ATS地上子に依存せず、車上のデータベースの保守が長期間不要な地点検出手法を開発しました。
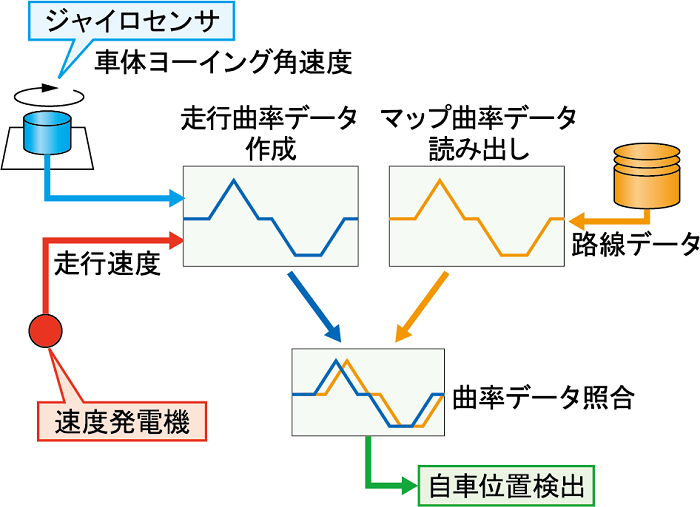
開発した手法では、事前に走行した際に測定した線路曲率に対して所定の信号処理をすることで生成されるマップ曲率を路線データとして車上データベースに搭載し、これと車上に搭載したジャイロセンサで計測する車体ヨーイング角速度と走行速度から算出される線路曲率とを照合して自車位置を検出します(図1)。
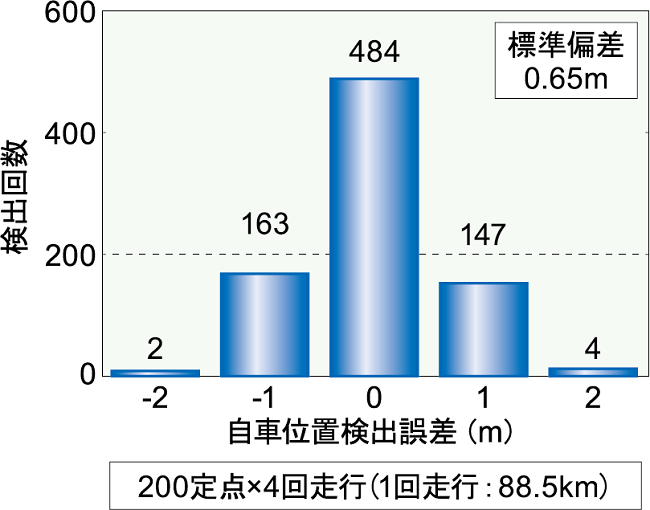
走行試験において、本手法により検出誤差±2mの精度で自車位置を特定できることを確認しました(図2)。線路曲率算出時に距離ベースのフィルタである空間フィルタを適用し、車種による車両動揺の相違や、軌道状態の経年変化の影響を除去しました。
これにより車上に搭載した路線データのメンテナンス頻度を10年程度まで延ばすことができます。
また、従来の方法では行き違いや大規模な駅などでデータベースと異なる線路を走行すると自車位置を見失うことがありました。
一方、開発手法では、走行曲率とマップ曲率の差が急拡大する場所を検出し、駅における停車番線の相違を判定することで、検出誤差±2mの精度を維持したまま自車位置の検出を継続できます。
これらの手法により、データベースのメンテナンス頻度を低減しつつ、曲線の位置に合わせた車体傾斜制御が可能となり、車体傾斜車両の乗り心地向上を実現できます。