25. 高速走行に対応した次世代振子制御システム
鉄道総研が開発した次世代振子制御システムは、ジャイロで自列車走行位置の曲率を検出し、曲線に合わせて正確に車体を傾けることで低周波の左右振動を抑え、乗り物酔いの発生を軽減することが特徴です。
このシステムをより高速で走行する車両に適用するには、車体をより速く、安定して傾斜させる技術が必要です。
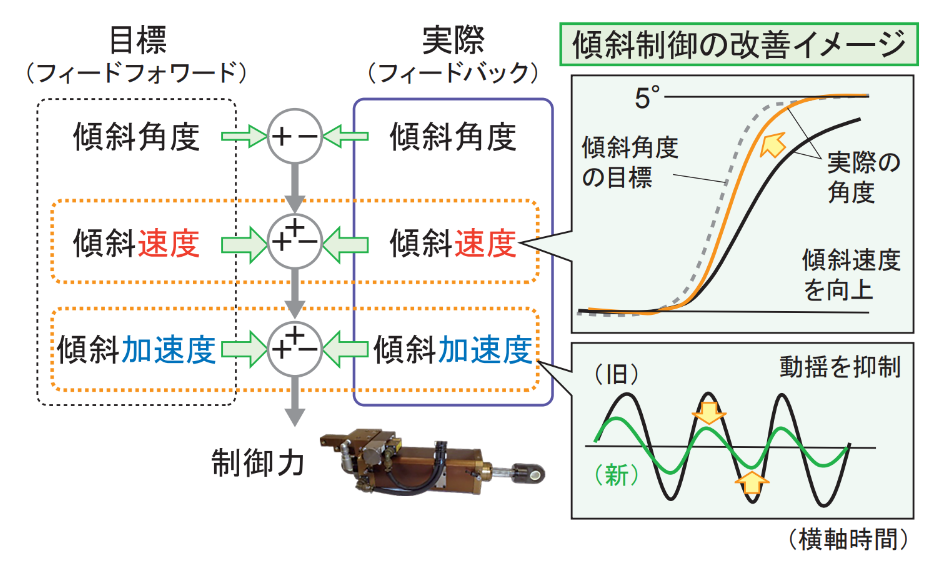
そこで、傾斜角度だけでなく、傾斜速度とその変化率である傾斜加速度も積極的に反映する新しい制御アルゴリズムを開発しました(図1)。
本アルゴリズムにより、傾斜角度と傾斜加速度のフィードバックのみを考慮した旧アルゴリズムよりも、速い傾斜動作が必要になる高速走行時の曲線中や、曲線/直線によらず車体が左右振動しているときに力を大きくする制御が実現できます。
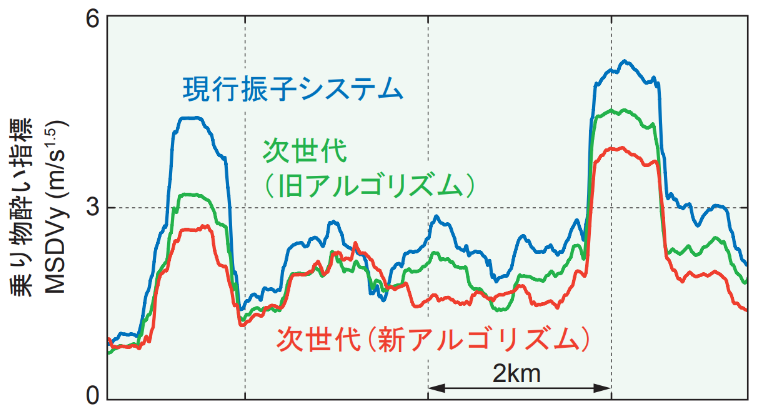
次世代振子制御システムに新アルゴリズムを適用して走行試験を実施したところ、現行振子制御システム、ならびに旧アルゴリズムによる次世代振子制御システムよりも低周波数の左右動揺が抑制され、車体傾斜に伴う乗り物酔い指標を低減できることを確認しました(図2)。
さらに、高速走行時の直線等で発生しやすい振子車両に特有のヨーイング動揺を抑制することができ、振動乗り心地も向上できることを確認しました。
新アルゴリズムを適用した次世代振子制御システムは、幅広い速度域において振子車両の乗り心地を向上できます。