21. 横圧低減と走行安定性を両立するボギー角操舵システム
曲線区間において車体に対する台車の旋回角(ボギー角)を制御することにより横圧を低減し、直線などの高速走行区間ではヨーダンパーとして動作することで走行安定性も両立できるボギー角操舵システムを開発しました。 本システムは従来の輪軸操舵方式のように特別なリンク機構をばね下に装架する必要がないので、台車の質量増を防ぐことができます。
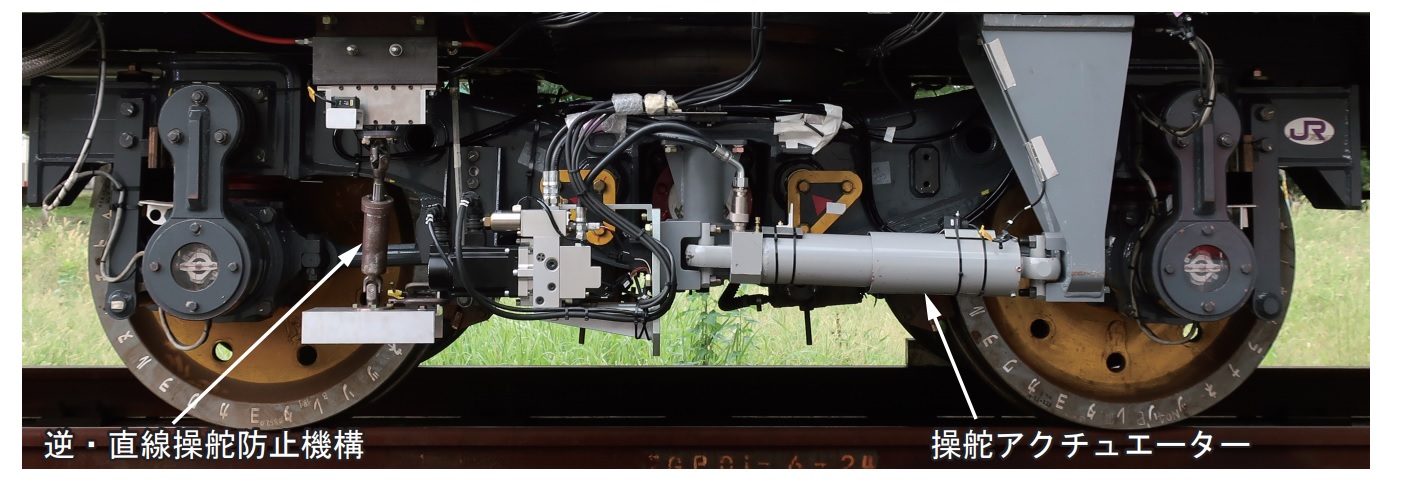
このボギー角操舵システムは、曲線を検知し操舵指令を算出する操舵制御装置、走行安定性を確保する必要がある場合にはヨーダンパーとしても動作可能な操舵アクチュエーター、逆操舵や直線区間での誤操舵を防止する機械的なボギー角検出機構の3要素で構成されています(図1)。
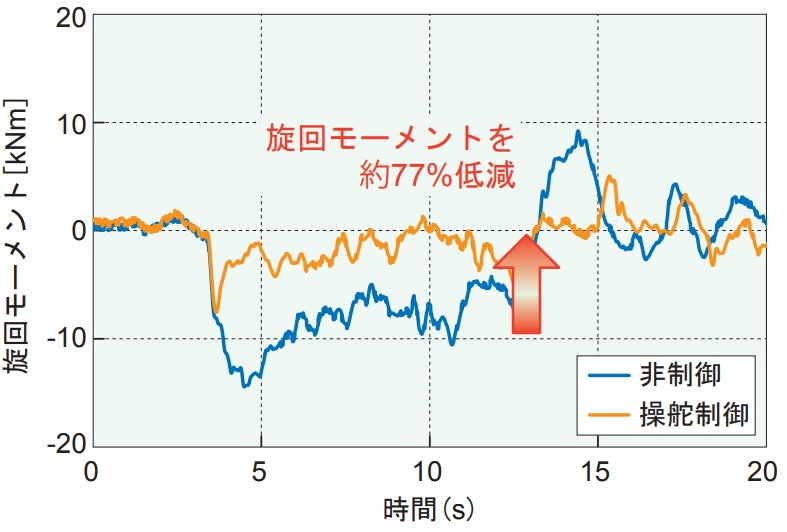
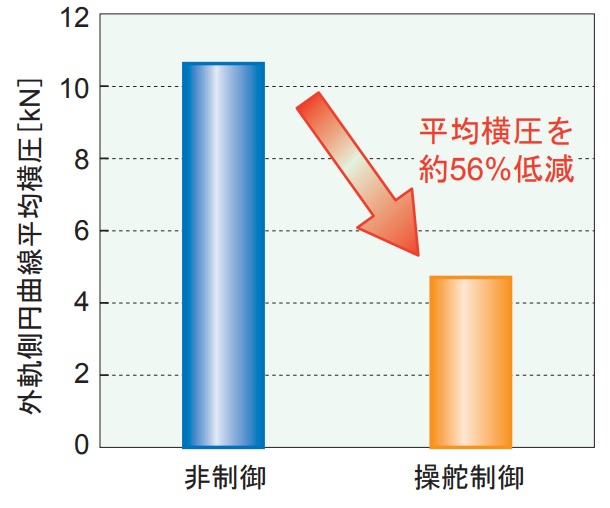
営業線での曲線通過を模擬した台車旋回試験では、操舵制御により台車旋回モーメントを約77%低減できることを確認しました(図2)。 また、蛇行動安定性試験では、現行車両と同等の走行安定性を確保できることを確認しました。 さらに、所内試験において、半径 160mの曲線通過時の平均横圧を約56%低減できることを確認しました(図3)。
本システムは、急曲線通過時や曲線通過速度向上に伴い著大な横圧の発生が懸念される特急車両などへの適用が効果的で、ヨーダンパーを装備した既存車両にも取り付けが可能です。