電車の空転再粘着制御方法の開発
本研究では、最近盛んに研究されている速度センサレスベクトル制御の実用化を見据え、速度センサ情報の代わりに主電動機電流情報を用いる、新しい空転・滑走検出方法を提案しました。
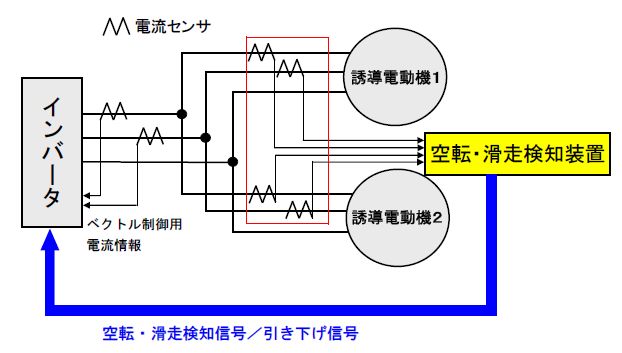
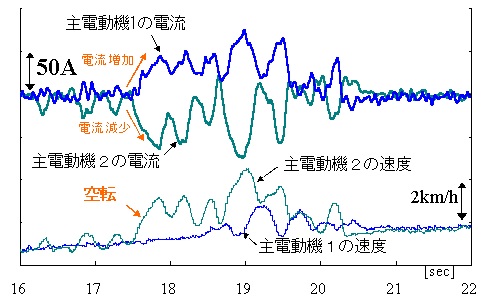
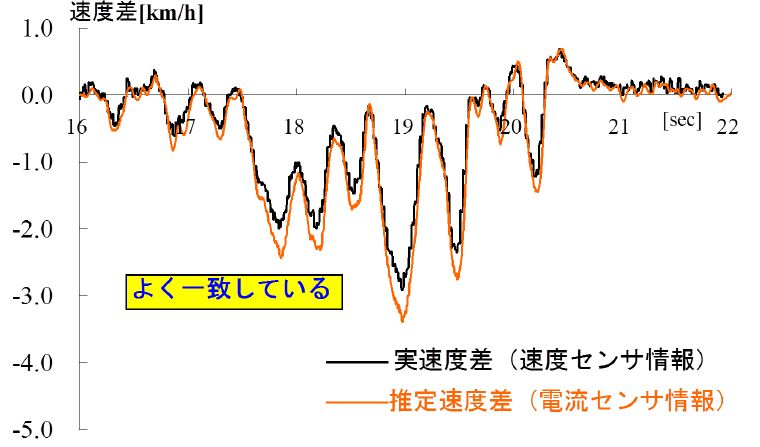
通常、ベクトル制御では、インバータ出力電流が一定となるように制御しています(図1)。この状態では、ある一つの車軸が空転滑走を始めた場合、空転した車軸の主電動機電流は急激に減少し、一方空転していない車軸の主電動機電流は急激に増加します(図2)。そこで、本開発方式では、主電動機の速度センサ情報以外に、各主電動機の電流差に着目することで、空転しているかどうかを判断することにします。電流センサと速度センサから算出した空転速度差の関係を図3に示します。これにより、新しい空転・滑走検出方式として十分使える見通しを得ました。
なお、本研究は運輸施設整備事業団(現:鉄道建設・運輸施設整備支援機構)の「運輸分野における基礎的研究推進制度」により実施しました。
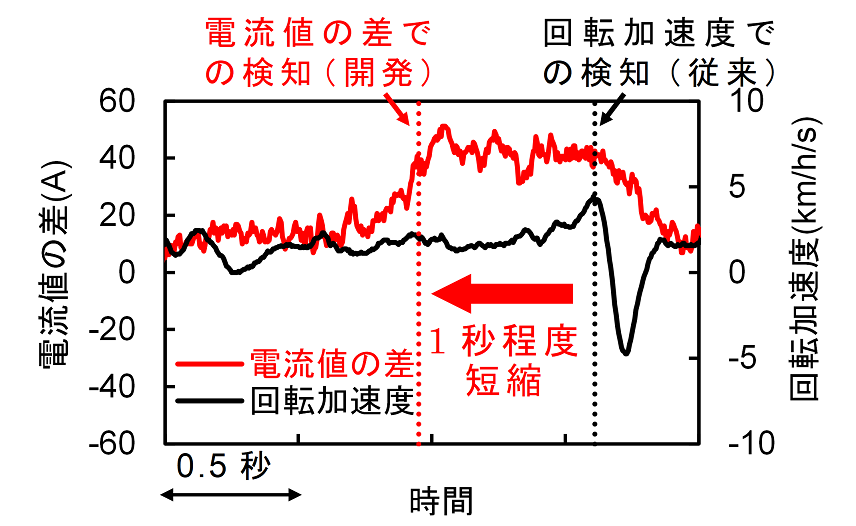
電車(JR西日本殿所有の323系電車)を用いた走行試験において、電流値の差を用いた検知方法と従来の検知方法の空転の検知時間を比較した結果を図4に示します。電流値の差を用いた検知方法は、回転加速度を用いた検知よりも空転の兆候を把握しやすく、従来よりも早く空転を検知(図4では1秒程度)できることがわかりました。そこで、電流値の差を空転の検知に用いた新たな空転制御方法を開発しました。
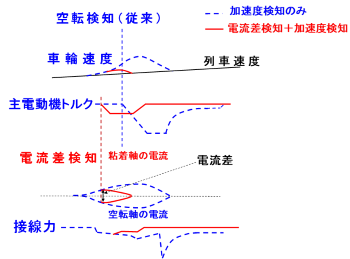
電流差検知した後のトルク指令の動作例を図5に示します。図中には,通常の再粘着制御が働いた場合の動作例も破線で示しました。電流差検知によるトルク引下げ(赤線)で空転が抑えられなかった場合には,加速度検知で再粘着制御(電気機関車用に開発した空転収束検知方法)を実施します。
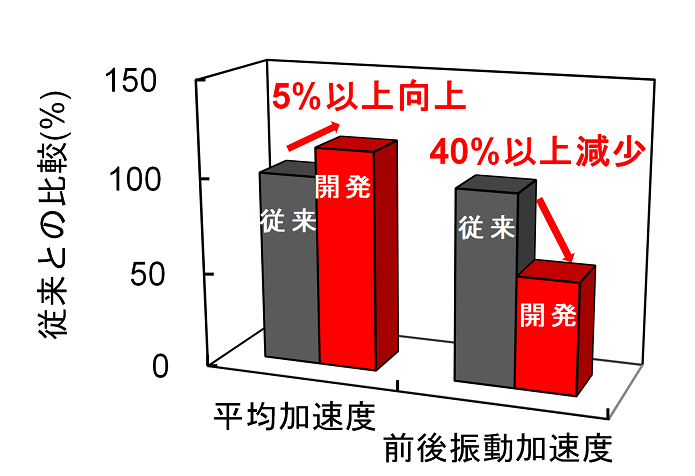
上記の開発した制御方法を用いて走行試験を実施した結果、平均加速度は5%以上向上しました。また、車体前後振動加速度が40%以上減少(短時間Lt値5dB以上低減)し、乗り心地が向上しました(図6)。
参考文献
- 山下道寛、渡邉朝紀:電気鉄道車両の主電動機電流に着目した空転検知、電気学会産業応用部門大会、2002.08
- 山下道寛、渡邉朝紀:主電動機電流に着目した空転検知、電気学会交通電気鉄道・リニアドライブ合同研究会、2002.07
- 山下道寛、渡邉朝紀、柳沼正博:主電動機電流差による空転検知—複数台誘導電動機駆動電車の試験結果—、電気学会全国大会、2002.03
- 山下道寛、渡邉朝紀:複数台誘導電動機駆動における粘着力推定を用いた速度センサレス再粘着制御、電気学会産業応用部門大会、2000.08
- 山下道寛、渡邉朝紀:複数台誘導電動機駆動における速度センサレス再粘着制御の一方式、電気学会交通電気鉄道・リニアドライブ合同研究会、2000.07
- 山下道寛,三木真幸,大江晋太郎,島田直人,山中章広,北村琢也:速度センサレス電車の主電動機電流情報を用いた空転抑制方法 、鉄道総研報告、Vol.31、No.6、Jun、2017