電気機関車のけん引力向上制御方法の開発
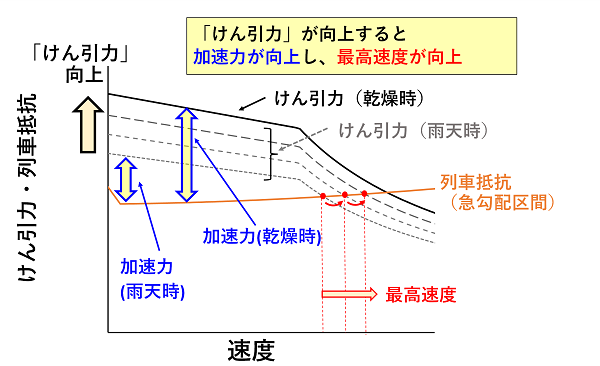
貨物列車は機関車にけん引されて走行します。鉄車輪と鉄レールの転がり摩擦は小さく、1,000ton以上の貨車を1両の機関車(重連の場合もある)でけん引して走行するため、運行に使用されるエネルギーはトラックに比べて少なく効率的です。これは、一度にトラック65台分の貨物輸送に相当するため、昨今のトラックドライバー不足解消の切り札となっています。しかし、機関車は鉄車輪と鉄レール間の摩擦力を利用した推進方式であるため、転がり損失は小さいのですが、得られる摩擦力もゴムタイヤと比べて小さいです。そのため、悪天候等によりレール表面が湿潤状態になると,レール・車輪間で得られる摩擦力は乾燥状態のときと比べて小さくなり、けん引力は低下しやすくなります。これにより,列車速度が低下し最悪の場合は勾配途中で停車してしまう場合もあります。また、空転を繰り返すと車輪やレールを損傷させてしまうこともあるため,動軸が空転した場合には,速やかに空転を抑制させる再粘着制御(トルク制御)を行う必要があります。 雨天時(悪天候時)におけるけん引力向上による加速力向上のイメージを図1に示します。乾燥時よりも低下するけん引力を向上することで、列車加速度が向上し、最高速度も向上します。特に、上り急勾配区間での列車遅延の軽減が期待できます。 安定した貨物輸送を確保するため、電気機関車の再粘着制御方法を研究しています。以下、開発した2つの制御方式について紹介します。
軸重移動を考慮した空転再粘着制御方法の開発
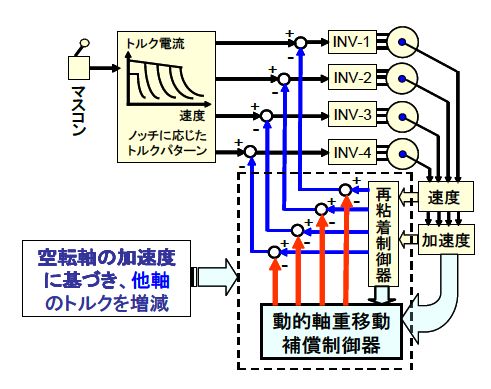
電気機関車のある軸で空転が発生したときや再粘着制御が行われるときに、空転した軸の伝達力が変化し、伝達力を受ける台車や車体にピッチングを起こす回転モーメントが働きます。その結果、粘着状態(空転していない状態)にあった他の軸に軸重の変化が生じ(軸重移動)、空転が誘発され易くなります。空転軸からの軸重移動に伴う他軸の軸重の変化を考慮した再粘着制御が実施できれば、粘着力を有効に活用することが可能となります。 今回、空転軸が引き起こす軸重移動を考慮し、空転誘発の抑制を目指す制御方式を開発しました。具体的には、空転軸の加速度に基づき、他軸のトルクを増減して、動的な軸重移動補償を行います。この制御方式をEH200形式直流電気機関車に適用し、空転誘発を抑制する再粘着制御系を構成しました(図2)。
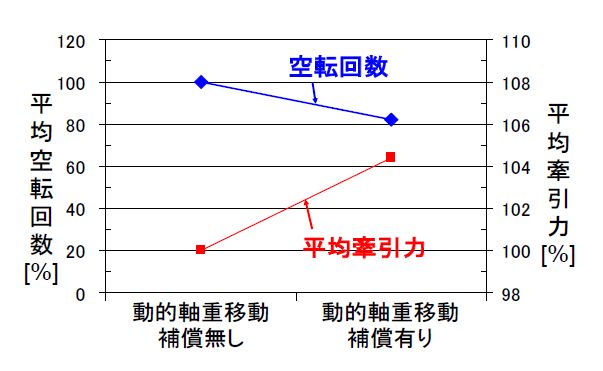
制御の有効性を確認するため、散水空転試験を実施しました(図3)。その結果、起動時における全軸の空転回数(空転再粘着制御実施回数)は平均で約20%低減し、平均牽引力は約4%向上し(図4)、空転頻度を低減しつつ牽引力を向上できることを確認しました。

早期の空転収束検知方法の開発
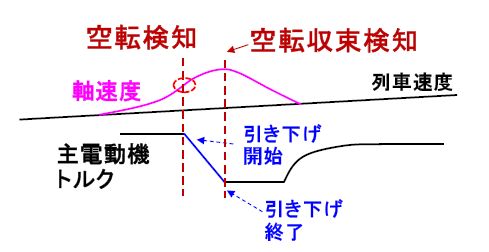
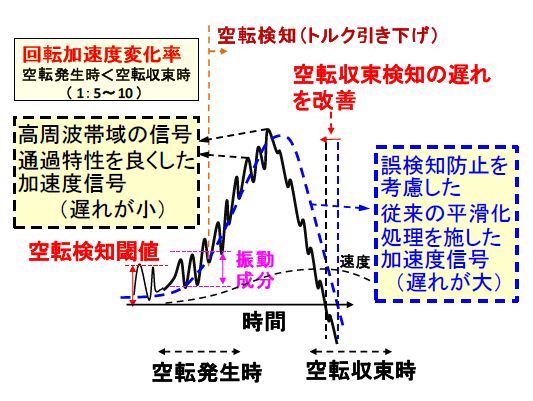
電気車の空転再粘着制御では、通常、主電動機回転子の回転速度や加速度情報を用いて空転を検知しています。回転速度や加速度が閾値を超過した時に空転と判断(空転検知)し、再粘着させるために主電動機トルクを引き下げます(図5)。その後、回転速度が最大値となり減速を開始した時を空転が収束し始めたと判断(空転収束検知)し、トルクの引き下げを終了します。
空転時の余分なトルク引き下げは、けん引力を低下させるので、空転収束を適正に検知することが求められます。回転速度や加速度の情報には、台車や車体の振動によって車輪回転成分以外の振動成分が含まれ、空転誤検知の要因となるので、通常、これらの情報には平滑化処理が施されます。ここで、空転発生直後の加速度は徐々に大きくなり、空転収束時の加速度は急激に小さくなる傾向があるため、両者の変化率には数倍の開きがあります。 そこで、その差に着目し、平滑化処理の時定数の大きなものを空転検知(トルク引き下げ開始)用に、小さいものを空転収束検知(トルク引き下げ停止)用に分けて使用することを提案しました(図6)。これにより、空転収束の検知の遅れによる余分なトルクの引き下げがなくなり、けん引力向上が期待できます。
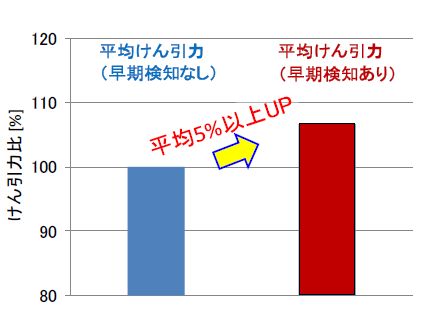
提案した空転検知方式の有効性を確認するため、新製入換機関車HD300を用いて散水空転試験を実施しました(図7)。試験の結果、けん引力は0~10km/hの速度域において、平均5%以上向上することを確認しました(図8)。本方法は本線用機関車や電車へも適用できます。

※本ページ内で使用している画像は、日本貨物鉄道(株)様の許諾を得て使用しています。
関連ページ
- 空転防止と再粘着制御 —PART 1— 【車両ニュースレター:2014年10月号】
- 空転防止と再粘着制御 —PART 2— 【車両ニュースレター:2015年1月号】
- 軸重移動を考慮した電気機関車の空転再粘着制御 【鉄道総研技術フォーラム2009】
- 機関車のけん引力を向上させる主電動機制御方法を開発しました 【プレスリリース:2014.10.14】
- 空転収束の早期検知による電気車のけん引力の向上 【2013年度主要な研究開発成果】
- 空転収束の早期検知によるけん引力向上制御 【鉄道総研技術フォーラム2014】
参考文献
- 山下道寛:空転制御によるけん引力向上と力行時間短縮効果、鉄道総研報告、2021年8月号 第35巻 第8号
- 山下道寛:(鉄道技術 来し方行く末29)空転再粘着制御、RRR、Vol.71、No.8、pp.28-31、2014.08
- 山下道寛、添田正:Development of Re-adhesion Control Method Considering Axle-weight Transfer of Electric Locomotive、QR、Vol.52、No.1、pp.7-12、2011.03(※)
- 山下道寛、添田正:電気機関車の空転頻度低減制御法の開発、R&M・社団法人日本鉄道車両機械技術協会、18巻11号722通号、2010年
- 山下道寛、添田正:電気機関車の軸重移動を考慮した空転再粘着制御法の開発、鉄道総研報告、第24巻、第6号、pp.41-46、2010.06
- 山下道寛:動的軸重移動補償を用いた空転頻度低減制御、第231回鉄道総研月例発表会、2010.02
- 山下道寛、添田正:電気機関車の空転頻度低減制御、Jrail2009・日本機械学会、2009.12
- 前橋栄一、山下道寛:大きな牽引力を伝達して列車を走らせる、RRR、Vol.65、No.8、pp.14-17、2008.08
- 山下道寛:(パテント)空転収束の早期検知による電気車のけん引力向上、RRR、Vol.72、No.5、pp.33、2015.05
- 山下道寛、添田正:空転の収束を早期に検知する再粘着制御方法、リニアドライブ/電気鉄道合同研究会・電気学会、2014.08
(※)印のついたリンクは外部サイトへ移動します。