カメラとLiDARセンサによる列車前方監視手法
1.概要
列車衝突事故の低減によるさらなる安全性の向上を目的として、カメラとLiDARセンサによる列車前方監視手法を開発しました。カメラとLiDARセンサのフュージョン技術により、夜間でも遠方の線路敷地内にある対象物を検知することができます。
※LiDARとは、「Light Detection and ranging(光による検出と測距)」のことであり、レーザー光を使って物体までの距離や方向を測定する技術のことです。電波を使って測定するレーダーと比較して、物体の位置や形状を高い精度で検知することができます。
2.物体検知手法
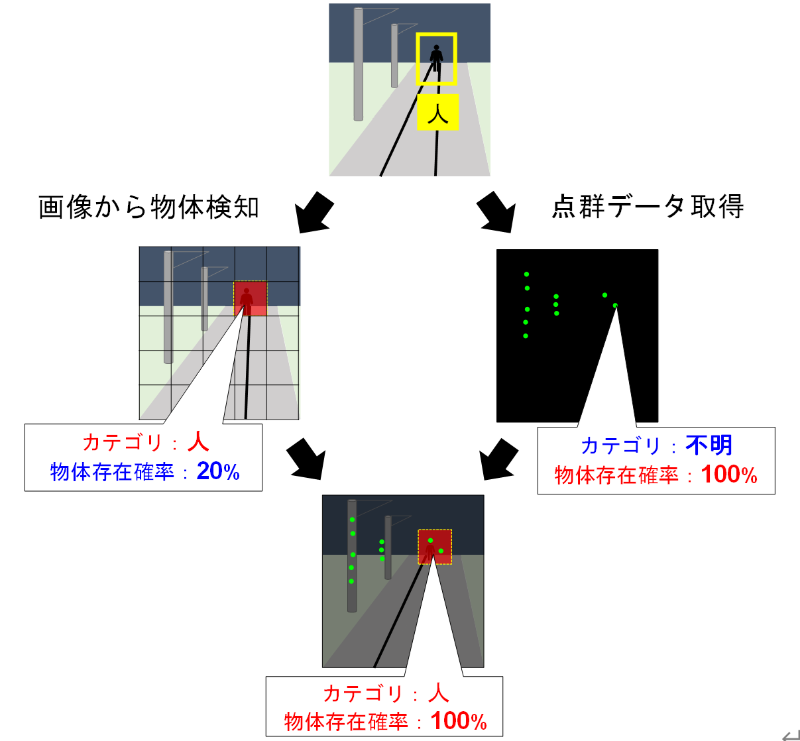
まず、カメラで画像を取得し、深層学習による物体検出アルゴリズムで物体カテゴリ、存在確率を算出します。それと同時に、LiDARセンサで物体にレーザー光を照射して跳ね返ってきた位置の情報を点群として取得します。画像に点群を投影し、両者の情報を組み合わせることで、最終的な検知判定を行います(図1)。
3.精度検証
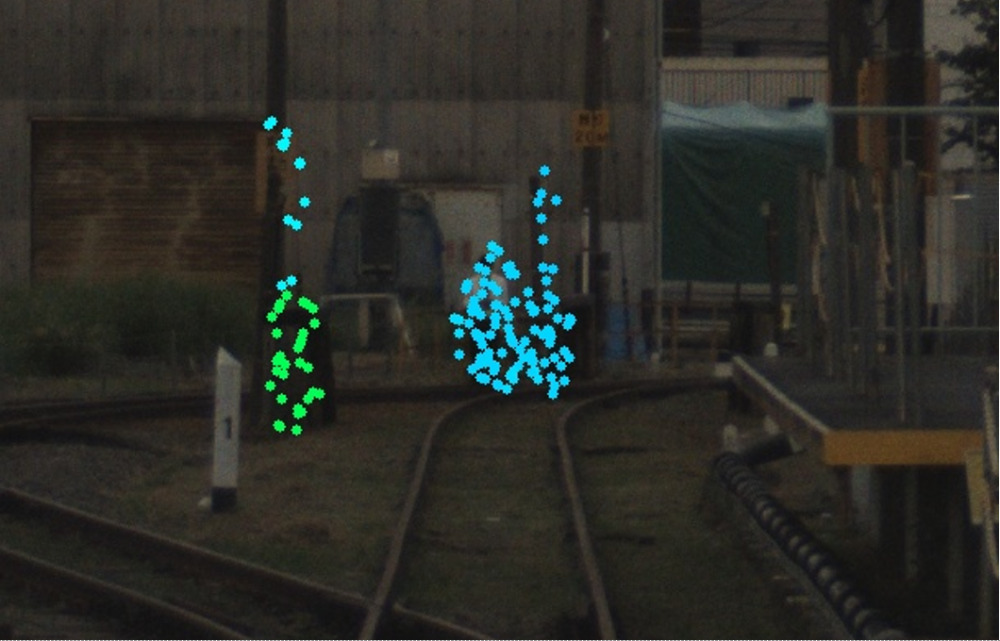
鉄道総研内の試験線にて、提案手法の性能評価試験を実施しました。200m前方の線路内に立つ人物の画像と、画像にLiDARセンサの点群を投影した結果を図2(a)(b)に示します。図2より対象物を含む線路周辺の物体に対応する高密度な点群を取得できることが確認されました。
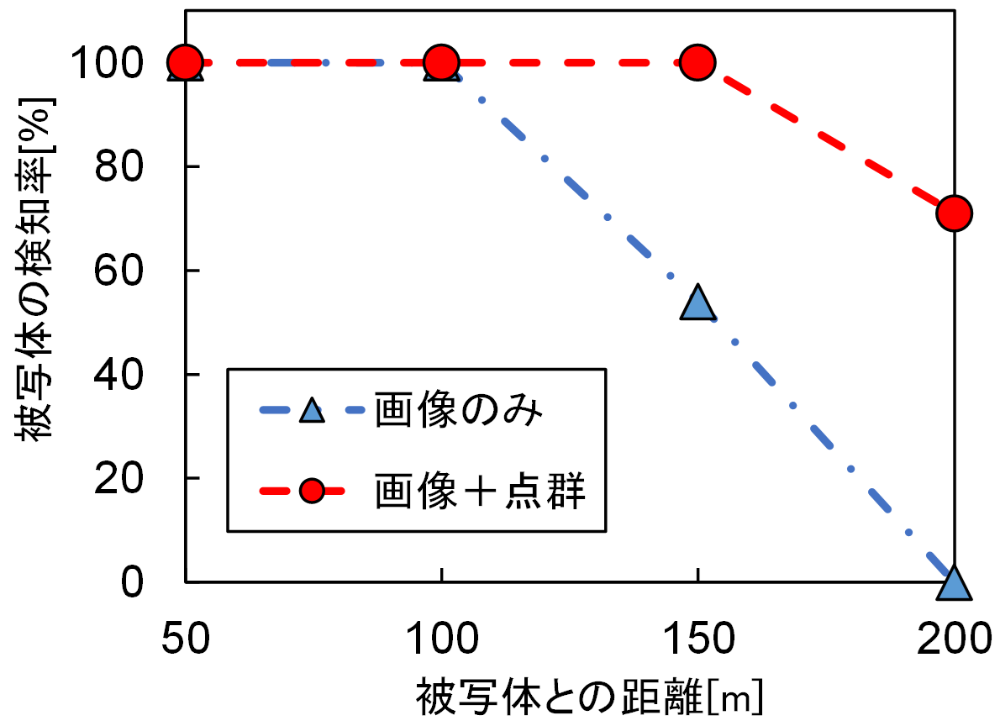
また、カメラとLiDARセンサの情報を統合し、日没直後における線路内の人物の検知率を算出しました。カメラのみでは200m先の人物検知率が0%であるのに対し、カメラとLiDARセンサを統合した場合70%検知できていることが確認できます(図3)。
これらの知見を踏まえて、センサ構成や検知手法の深度化によりさらなる検知距離の向上を目指しています。

参考文献
- 長峯望:複数センサによる車載型前方監視、鉄道総研月例発表会要旨、第332回、2019.08
- 影山椋、長峯望、向嶋宏記、森下力、酒井信弘、福井省三:深層学習による列車前方カメラ映像からの支障物検知手法の精度評価、電気学会、自動車・交通・電気鉄道合同研究会, TER-20-069 (2020)
- 影山椋、長峯望、向嶋宏記:列車前方支障物検知のためのカメラとLiDARセンサの統合手法の検討、第27回鉄道技術・政策連合シンポジウム、2020.12