車上からの3次元線路空間データの構築手法
1.概要
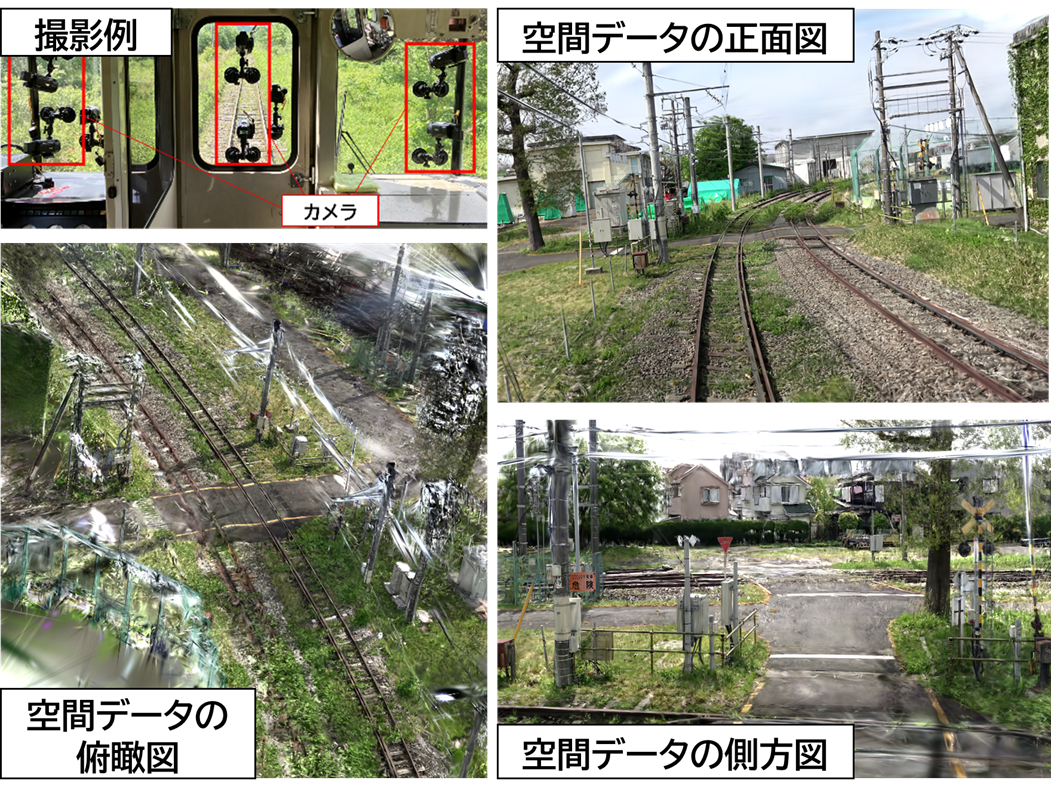
鉄道沿線には、信号機・標識・電化柱・架線・土木構造物など多種多様な設備が広域にわたって配置されており、これらの定期的な確認作業は鉄道事業者にとって欠かせない業務です。しかし従来、作業員が個別の設備を現地で直接確認する必要があり、移動・夜間作業・少子高齢化による人手不足といった課題が深刻化しています。 そこで当研究室では、列車の運転台に設置した市販のビデオカメラで撮影した前方映像のみを用いて、実環境を写実的に再現した「3次元線路空間」を構築する手法を研究しています。本手法により、事務所のパソコン上で信号機の見通し確認、設備外観の点検、距離・角度の計測などが可能となり、従来の現地確認に代わる新しい検査手法として活用が期待できます。 本手法は、(1) 営業列車への設置・撤去が短時間・簡便に行えること、(2) 在来線最高速度(130 km/h)での走行時にも適用可能なこと、(3) 線路内への立入りを必要とせず、広域のデータを繰り返し取得可能なこと、の3点を特徴とします。
ファイルの読み込みには時間がかかる場合があります
ファイルは大容量なので注意してください(約100MB)
操作:ドラッグで回転、ホイールで拡大縮小、右ドラッグまたは Shift+ドラッグで移動
※読み込みエラーの場合はページをリロードして再読み込みしてください
2.3次元線路空間の構築手法
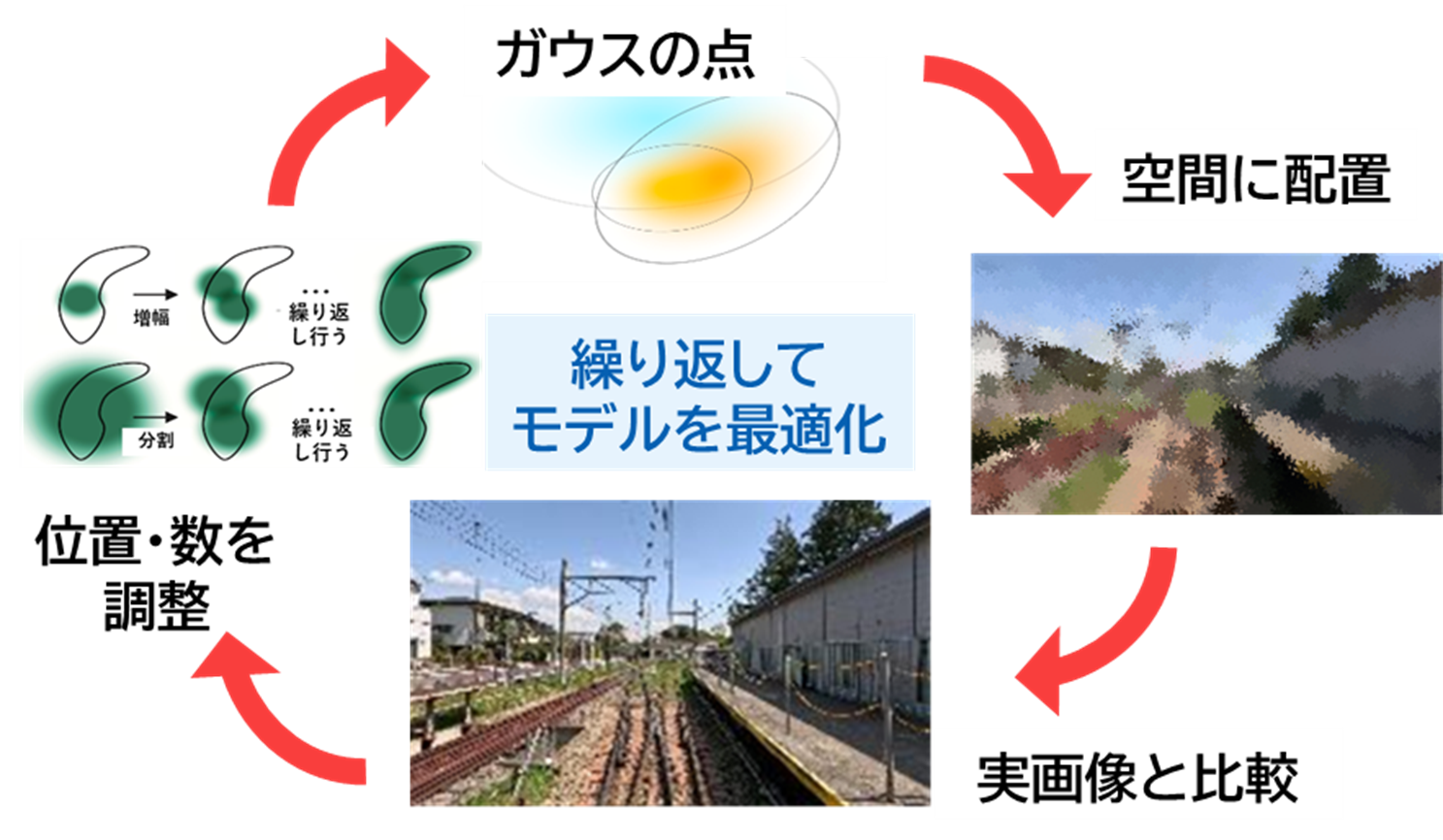
提案手法は、(1)走行映像の撮影、(2)キロ程付与と対象区間の抽出、(3)Structure from Motion (SfM) によるカメラ位置・点群推定、(4)GNSS情報を用いた実寸化、(5)3D Gaussian Splatting(3DGS)による3次元モデル構築、(6)上下線空間の統合という6つの処理で構成されます。 このうち3D Gaussian Splattingは2023年に発表された新しい3次元表現技術で、3次元空間を多数の「ガウシアン」と呼ばれる粒の集合として表現します。従来のメッシュや点群に比べ、写実的で滑らかなレンダリングを高速に実現できることから、近年コンピュータビジョン分野で急速に注目を集めています。当研究では、この先端技術を鉄道分野に応用し、鉄道事業者が本社や管理室で使用できる一般的なGPU搭載PC(ゲーミングPC相当)を用いて、約1 kmの線路空間を構築できる実用的な処理パイプラインを開発しています。

3.3D Gaussian Splattingによる高精細な空間表現
構築処理の核となる3D Gaussian Splatting(3DGS)は、2023年のSIGGRAPHで発表された新しい3次元シーン表現の技術です。従来の点群やメッシュと異なり、3次元空間中の各点を「位置」「形状を決める共分散行列」「色情報」を持つガウス分布(ガウシアン)として表現し、膨大な数のガウシアンを重ね合わせることで、写実的で滑らかな3次元空間を高速にレンダリングできます。 当研究では、SfMで得られた疎な点群を初期値として、撮影した列車前方映像とガウシアンのレンダリング結果との誤差が小さくなるように、ガウシアンの位置・形状・色を最適化していきます。これにより、バラスト、植生、信号機、電化柱、標識といった沿線の環境を、あたかもその場にいるかのように再現した3次元線路空間が得られます。ユーザは事務所のPC上で、任意の視点から空間内を自由に動き回って確認することができます。
4. 見通し検査への応用
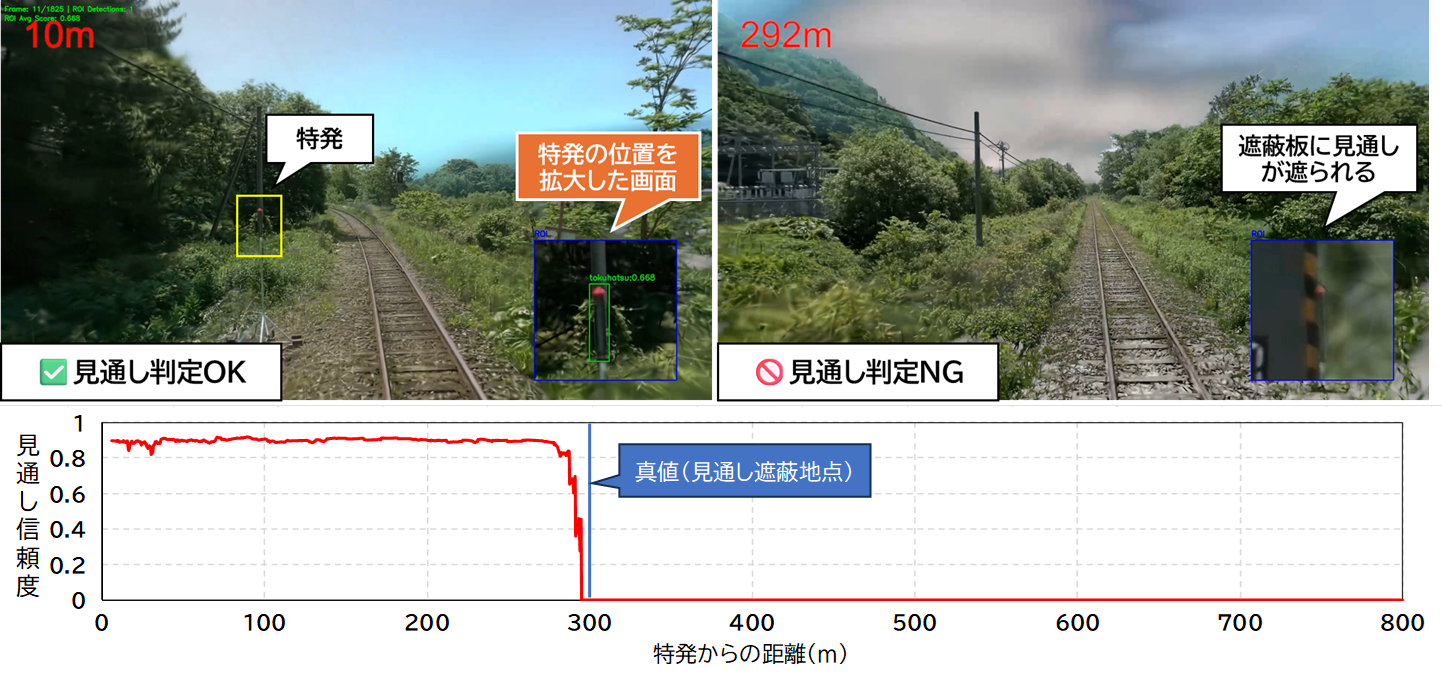
構築した3次元線路空間の応用例として、特殊信号発光機(特発)の見通し検査システムを開発しました。従来、信号機の見通し検査は作業員が現地を訪問し、運転士目線から信号機が正しく見えるかを目視で確認する必要がありましたが、本システムでは、構築した3次元線路空間上に運転士目線の仮想カメラを設定し、AIが画像認識によって信号機の見え方を自動判定します。これにより、作業員の移動や夜間作業を削減し、現地作業の負担軽減が期待されます。
今後の展開
今後は、3次元線路空間の構築精度と処理速度のさらなる向上を目指すとともに、特殊信号発光機や信号機の支持柱、沿線構造物など、より多様な設備に対する検査・計測手法への応用を進めていきます。また、構築した3次元線路空間を活用した工事前の現地事前確認など、保守メンテナンス以外の業務への展開も検討していきます。 当研究室では、画像認識・3次元再構成・機械学習といった先端のコンピュータビジョン技術を駆使し、鉄道インフラの維持管理を次世代のものへとアップデートすることに取り組んでいます。