25. 現車試験を補う滑走制御シミュレータ
ブレーキ時の滑走制御の性能を評価するうえで、現車試験による制御アルゴリズムの調整は最も重要なプロセスです。しかしながら、現車試験で車輪・レール間の低粘着条件を安定して再現することは容易ではなく、走行ごとに異なる粘着条件下でアルゴリズムの調整を行わざるをえません。
この問題を解決するため、実機と計算機の長所を組み合わせた滑走制御シミュレータを開発しました。
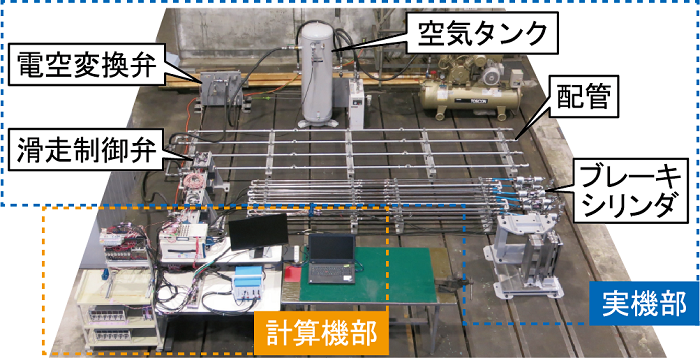
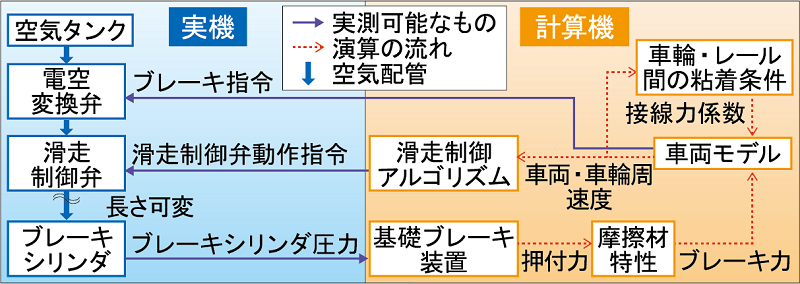
本シミュレータは、空気タンクからブレーキシリンダまで現車と同じ空圧システム部品を用いた実機部と、粘着条件・車両モデル・滑走制御アルゴリズムを規定する計算機部で構成されます(図1、図2)。実機部では、長さ可変の空気配管により空圧システムの応答性を変化させることができます。
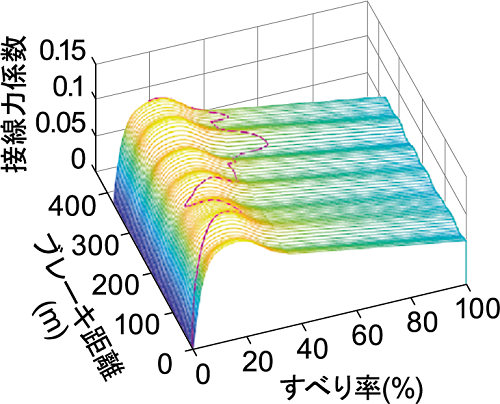
計算機部では、指定した粘着条件(図3)と車両モデルに基づいて速度情報(車両および車輪周速度)をリアルタイム演算します。速度情報が滑走制御アルゴリズムの滑走検知条件を満たすと、実機部の滑走制御弁が動作しブレーキシリンダ内の空気が排気され、その圧力変化を読みとった計算機部が再度速度情報を演算する、という実時間のループを構成しています。
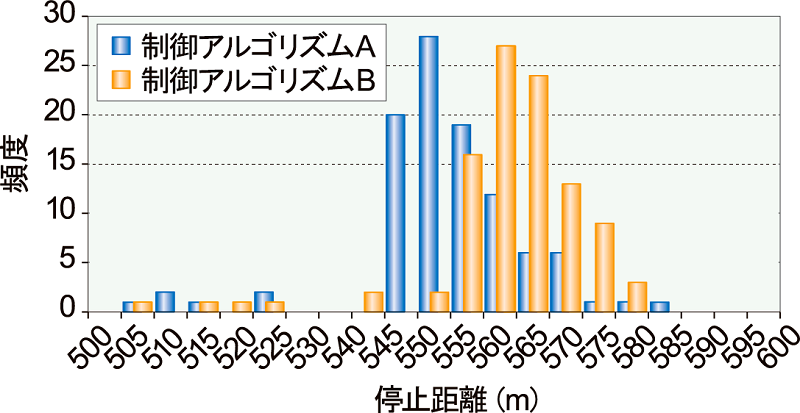
本シミュレータにより、現車の空圧システムを用いてその応答特性を再現しつつ、粘着条件と滑走制御アルゴリズムを任意に指定することで様々な検証が可能です。例えば、多様な粘着条件と滑走制御アルゴリズムの組み合わせにおける停止距離の分布を比較することで、各滑走制御アルゴリズムが持つ傾向を統計的に評価できます(図4)。
このように、現車試験の事前に有望な滑走制御アルゴリズムの性能比較を行うことで、現車試験の試番数を半減できます。