7. 将来のドライバレス運転に向けた列車前方の支障物検知システム
車載のカメラとセンサによる列車前方の支障物検知は、踏切がある等の一般線区における将来的なドライバレス運転導入時の線路内の安全確保手段として、有力な技術の一つとして考えられています。
この実現のためには、夜間の支障物や沿線の火災への対応等も含めて、複数のセンサを統合したシステムが必要となります。
そこで、センサフュージョンによる列車前方の支障物検知システムを開発しました。
本システムは、可視光カメラ、LiDARセンサ、遠赤外線カメラを統合したもので、可視光カメラ画像からAIを用いて線路領域を抽出し、線路領域に侵入した物体等を検知するとともに、LiDARで距離を、遠赤外線カメラで温度を検知します。
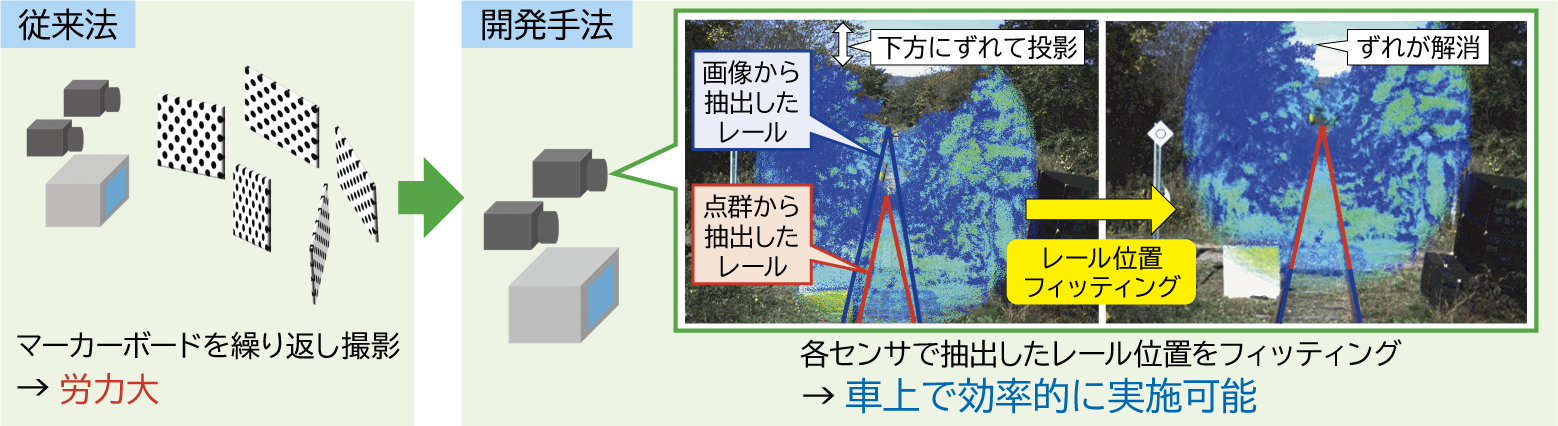
一方、複数センサの統合のためには、センサ個々のキャリブレーション(校正・調整)が必要となりますが、この作業は煩雑です。
このため、鉄道固有のレール情報を用いて様々なセンサ同士を一括してキャリブレーションする手法を開発しました(図1)。
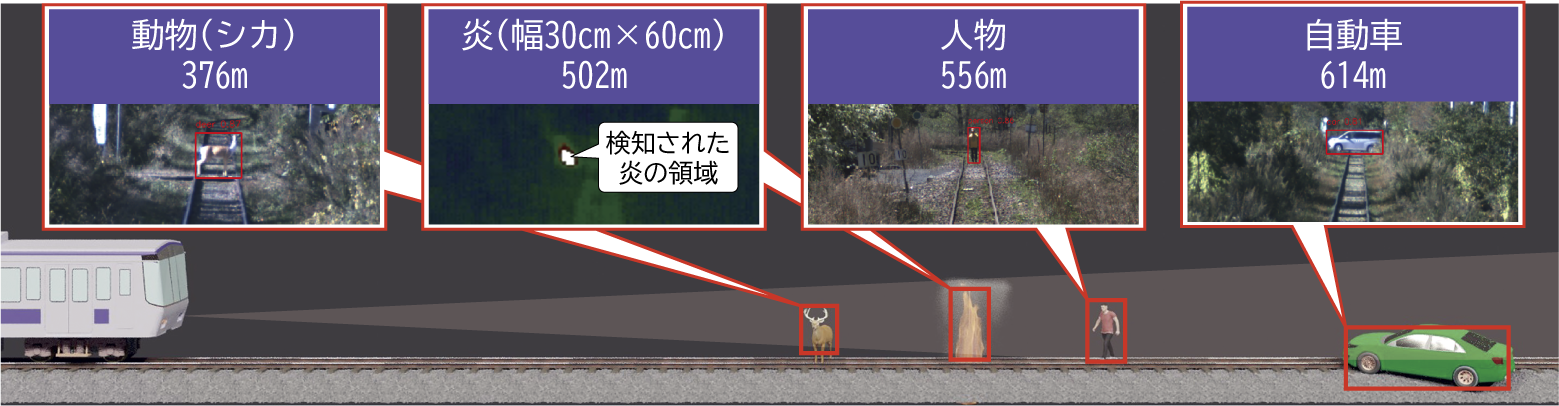
本システムの実際の直線線路における検証では、野生動物(シカ)を最大376 m、沿線火災の炎を最大502 m、人物を最大556 m、自動車を最大614 mの距離から検知できることを確認しました(図2)。
本システムの開発で得られた知見は、鉄道事業者の線区条件に応じた列車前方支障物検知システムの開発の仕様決定等に活用できるほか、現在開発中の「既存の鉄道システムを活用した自動運転システム」の基盤技術として適用していく予定です。
また、キャリブレーション手法は、様々な前方支障物検知システムのコア技術として活用することができます。