次世代振子制御システムの開発
在来線の制御付き振子車両の性能向上と乗り心地改善を図るため、次世代振子制御システムの開発しました1)。振子とは曲線を走行するときに生じる遠心力を緩和するために、車体を傾斜させることです。システムの要素技術として、(1)自車位置の検出、(2)人間工学的評価関数に基づく車体傾斜目標値(以下、振子パターン)の演算生成、(3)車体を傾斜させるためのアクチュエータがあります。
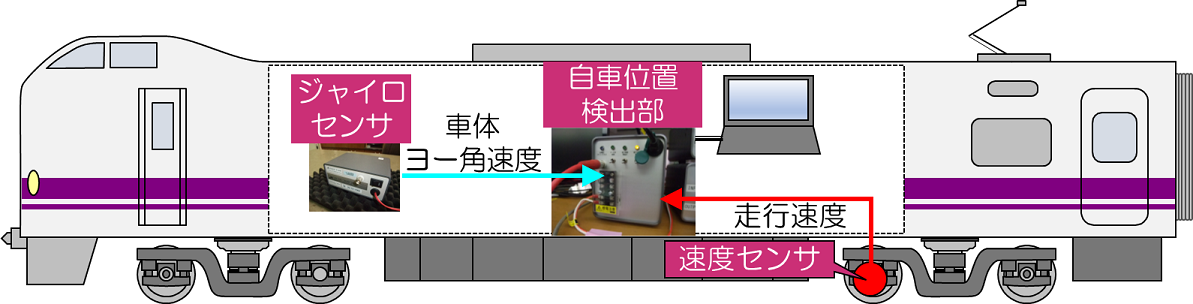
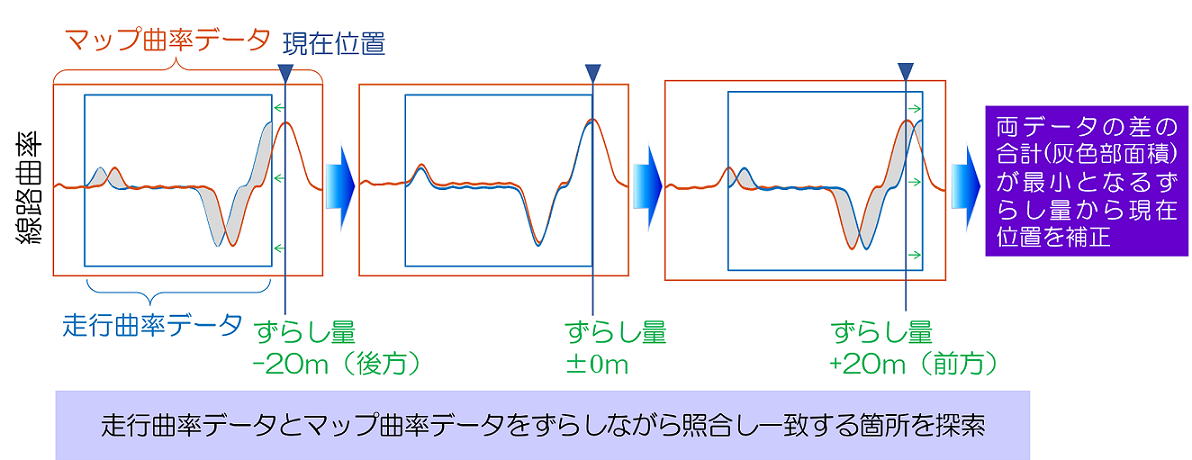
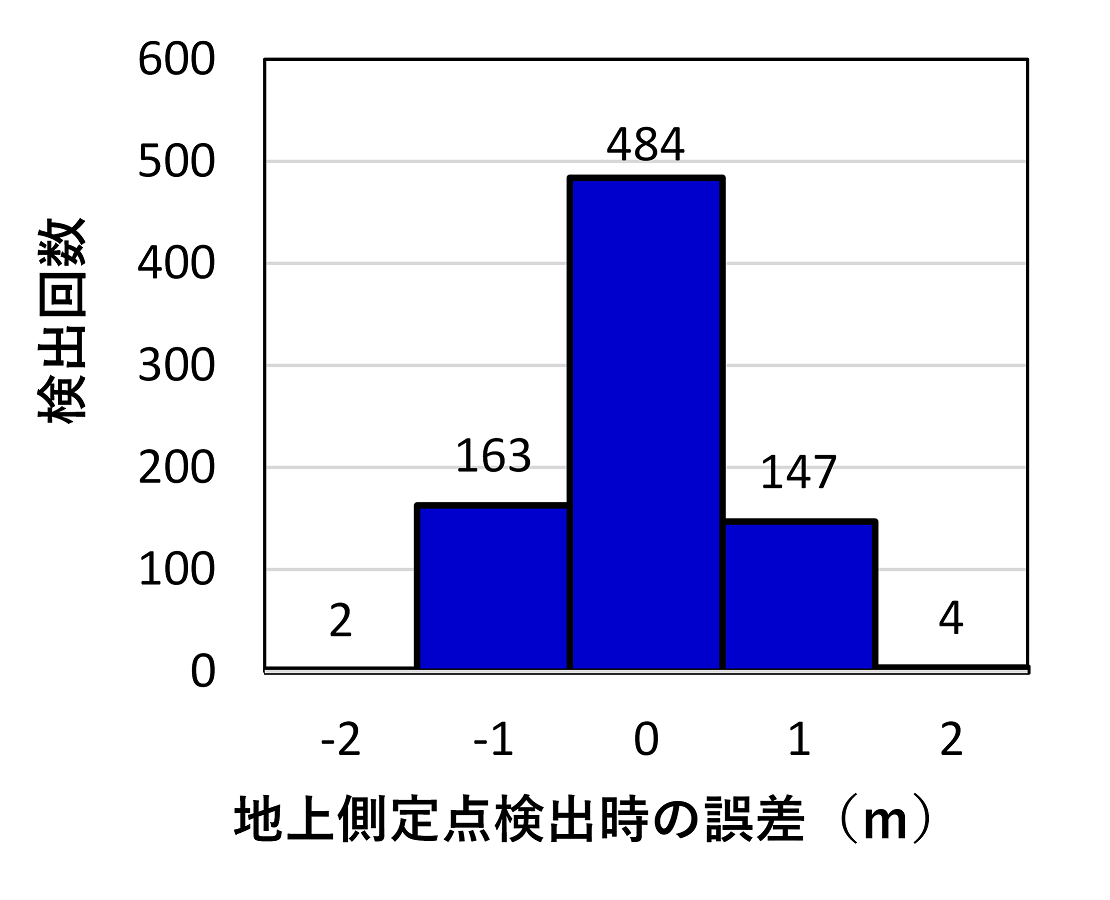
(1)自車位置検出機能は、図1で示すように自車位置検出部、ジャイロセンサ、速度センサで構成されます。車体ヨー角速度を速度センサによる走行速度で除して算出する走行曲率データと、あらかじめ自車位置検出部に登録された線路曲率データを図2に示すように照合することで実現します2)3)。自車位置検出精度の検証結果の一例を図3に示します。
(2)振子パターンは、検出した自車位置を元に車上に登録された先行区間の線路曲率とカントを参照することで、先行区間でのTCT*1およびMSDV-y*2ができる限り小さくなるように演算され出力されます。
*1 TCT: Transient Curve Total index、緩和曲線走行時の乗り心地総合評価指標
*2 MSDV: Motion Sickness Dose Value、乗り物酔い暴露量値
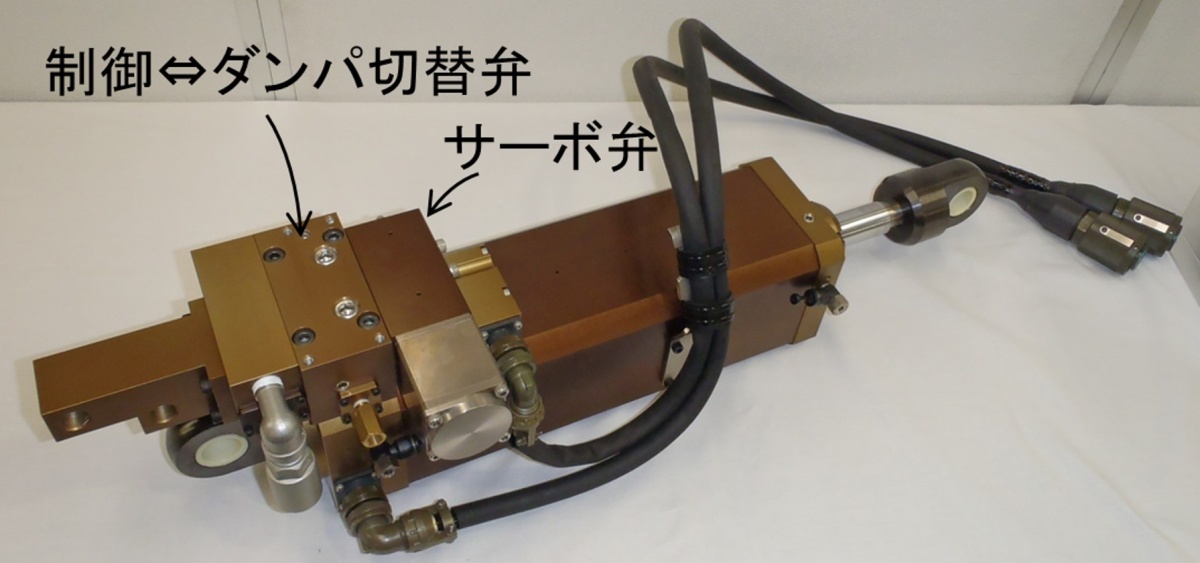
(3)演算・出力された振子パターンに従って正確に車体傾斜を行うためには、応答性の高いアクチュエータが必要です。そこで図4に示す応答性を向上した振子制御用空気圧アクチュエータを開発しました。振子制御を行わないときにはダンパとして機能します。