7. ブレーキ力の低下を補償するブレーキ制御手法
現状のブレーキシステムは、天候条件や回生ブレーキの作用状態などにより同じブレーキ指令でも減速効果は一定にならず、運転士や定位置停止装置(TASC)などがブレーキ指令を調整して減速効果の変動を補い、停止位置精度を確保しています。
これに対し、運転士の操作や外部装置に頼らず、ブレーキシステム自身が減速効果の変動を検知して停止位置精度を向上することを目的に、ブレーキ指令を自動的に更新する制御手法を開発しました。
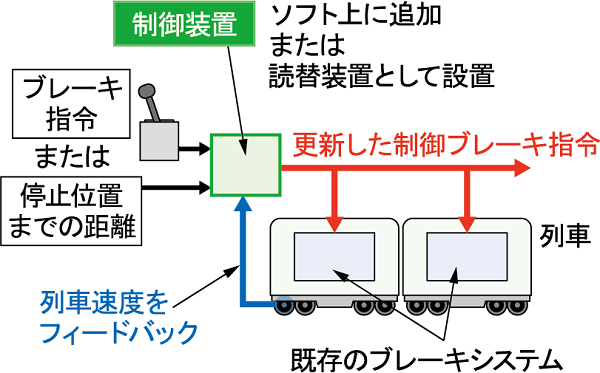
開発した制御手法では既存のブレーキ制御系に、新たな制御装置を追加し、この装置がブレーキ指令または停止位置までの距離を受信すると、列車からフィードバックした速度に基づいて制御ブレーキ指令を更新しシステムに与えます(図1)。
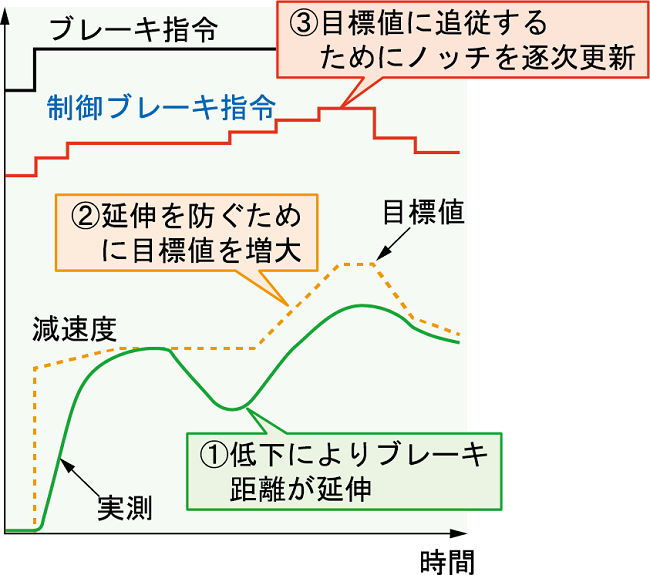
これにより、列車の減速度を停止位置までの残距離から計算される目標値に追従させ、ブレーキ力が不足する場合には制御ブレーキ指令を逐次更新します(図2)。
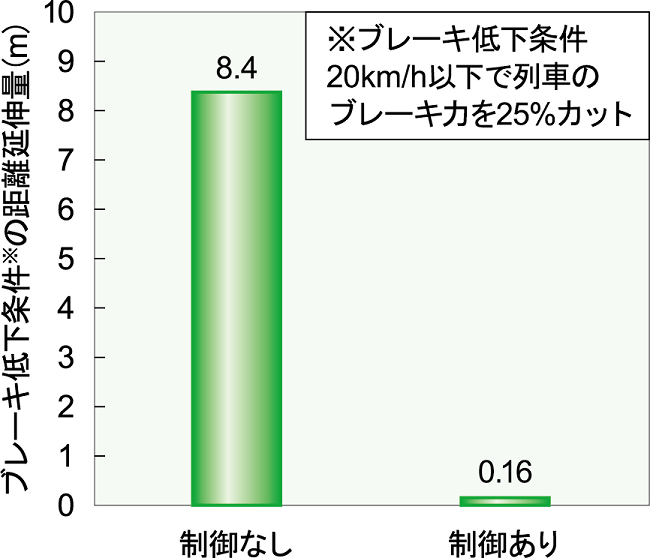
鉄道総研の所内試験線で走行中にブレーキ力を強制的に低下させるなどの試験を実施した結果、開発した制御手法は、ブレーキ力が急に低下しても、ブレーキ距離の延伸を抑制し、停止位置の精度を維持できることを確認しました(図3)。
本手法を既存のブレーキ制御系に追加することで、列車の停止位置精度を向上するための運転士の操作を支援できます。
また、将来の自動運転実現時にも活用できます。