視線検知機能を用いた運転シミュレータ訓練
1.はじめに
前方に発生する異常事象をいち早く発見するためには,運転士の注視行動(注視位置や注視時間)が重要だと考えられます。そこで,走行速度の異なる2つのシナリオ(高速と低速)において、異常事象を発見できた運転士とできなかった運転士の注視行動を比較しました。
2.高速走行(約90km/h)における検討
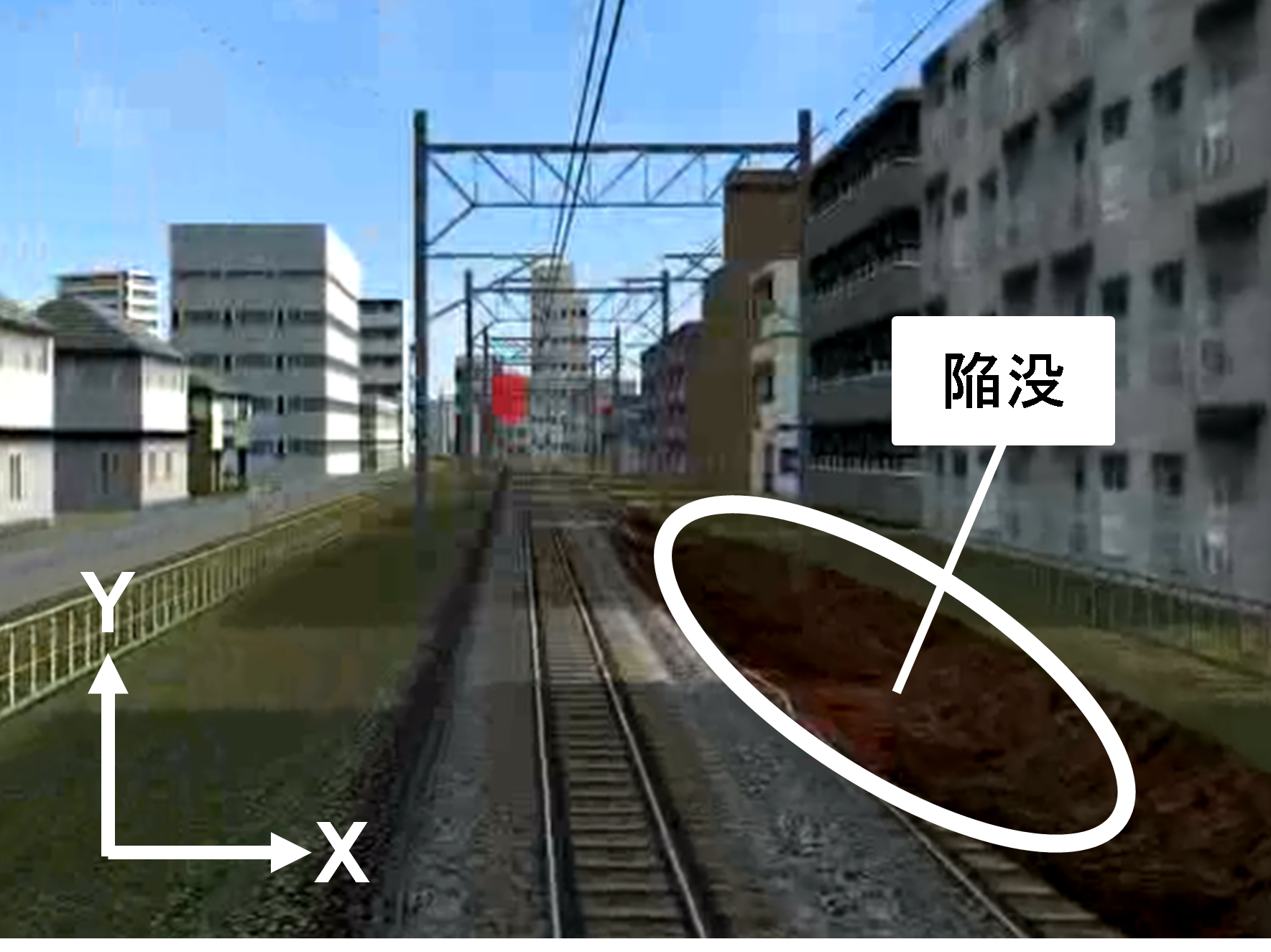
視線検知装置付き運転シミュレータ(図1)を用いた訓練の視線データを分析しました。異常事象として、右側の隣接線が陥没しているシナリオを設定しました(図2)。それに加えてATS地上子の故障を予め運転士に通告し、陥没に気付きにくいように注意をそらす条件としました。
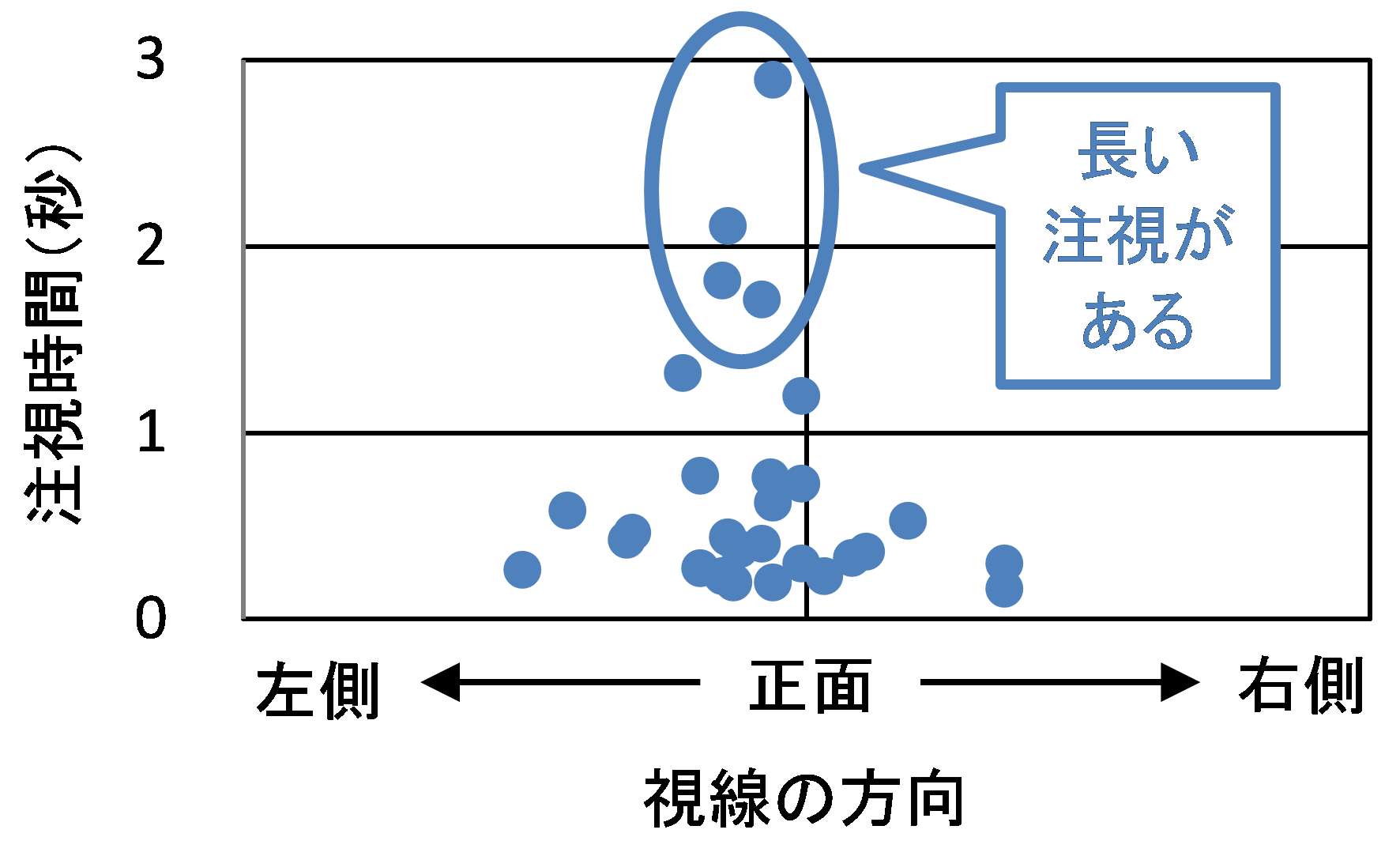
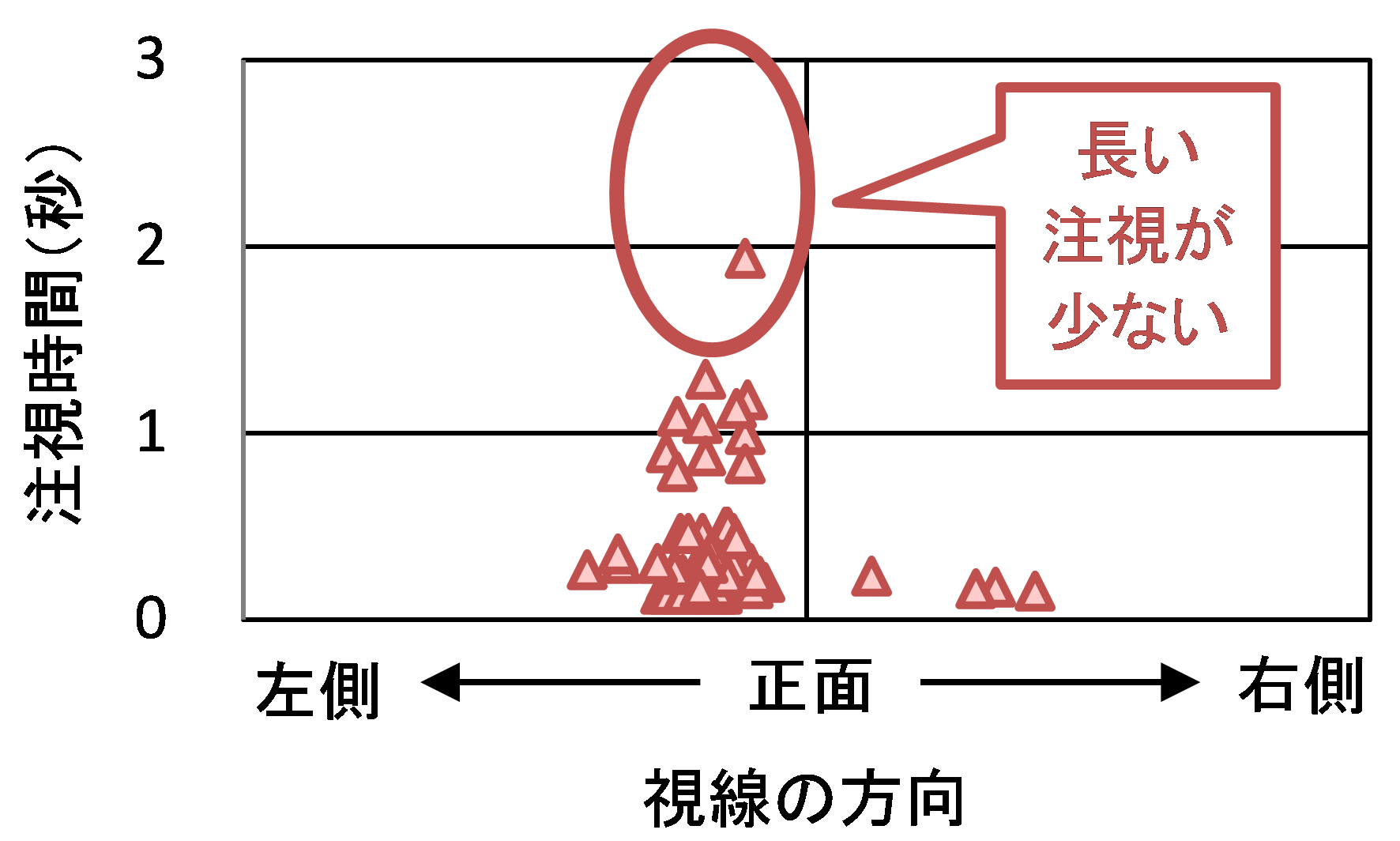
陥没箇所を通り過ぎる前にブレーキをかけた運転士を発見群、ブレーキをかけずに陥没箇所を通り過ぎた運転士を非発見群としました。発見群は長い注視と短い注視が混在していました(図3)。非発見群は長い注視が少ない傾向でした(図4)。このことから、高速走行においては、長い注視と短い注視がバランスよく混在していることが信号や標識等を確認したうえでレール付近の異常事象にも気付くのに適した注視行動である可能性が考えられます。

3.低速走行(約15km/h)における検討
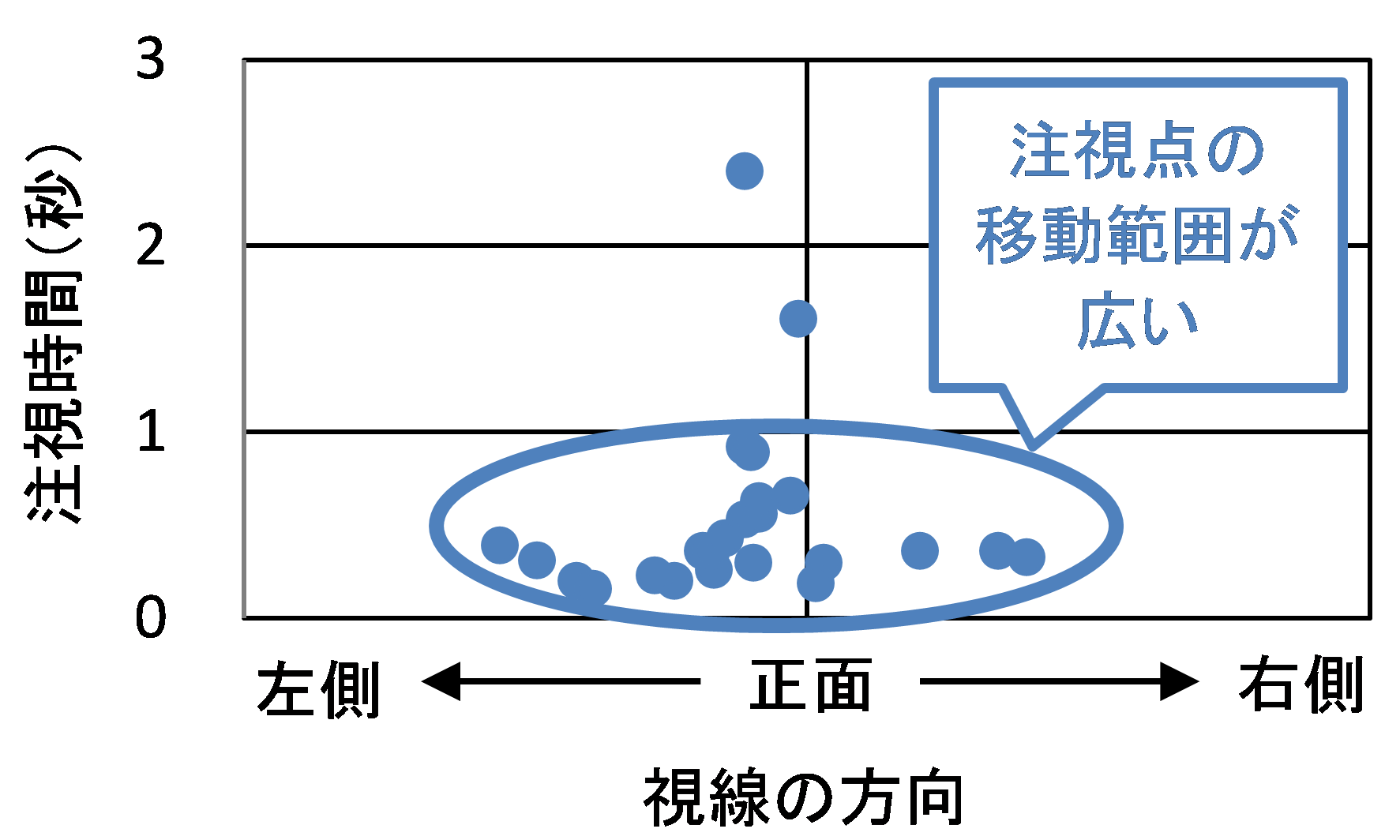
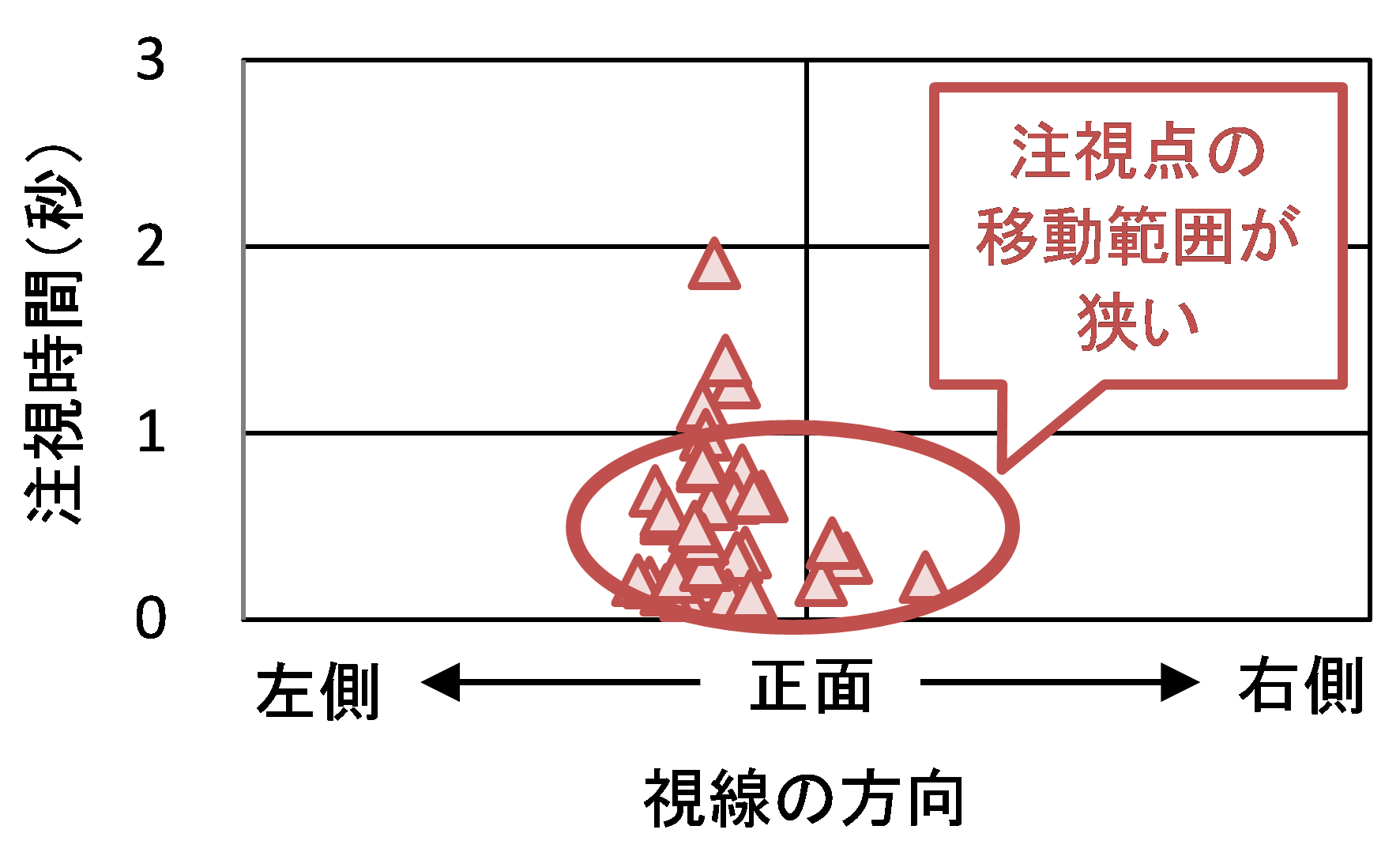
駅手前の信号機で待機、駅出発の信号機が突然赤に変化、線路上に作業員、信号機故障で低速運転に対応した後、通常運転となり約15km/hから加速する場面において、隣接線が陥没しているというシナリオとしました。発見群は注視点の移動範囲が広いのに対して(図5)、非発見群では移動範囲が狭い傾向でした(図6)。このことから、低速走行においては、視線を広く移動させることが様々な注視対象物を効率的に確認し異常事象に気付くのに適した注視行動であると考えられます。
4.おわりに
これらの検討により、高速走行、低速走行それぞれに適した視線の配り方があることがわかりました。これらの知見を運転士の教育に活用するためには、視線データを当該運転士にフィードバックすることが考えられます。効果的なフィードバック方法について、現在、検討しています。
ここで紹介した視線データの取得では、北海道旅客鉄道株式会社の関係者の皆様に多大なご協力を頂きました。ここに記して厚く御礼申し上げます。