10. VR技術を用いた車掌の安全確認技量の評価手法
車掌の養成では、目視によるホーム上の安全確認技量を身につけることが重要ですが、現在は被養成者がホーム上の安全確認の際に目視している場所や、指導車掌との視線の違い等を定量的に把握する手段がありません。
そのため、研修現場では被養成者の行動・様子から推測した視線や、目視場所に関する被養成者からの報告に基づいて指導が行われています。
これに対し、本研究では VR 技術を用いて視線行動の定量的な把握を試みました。
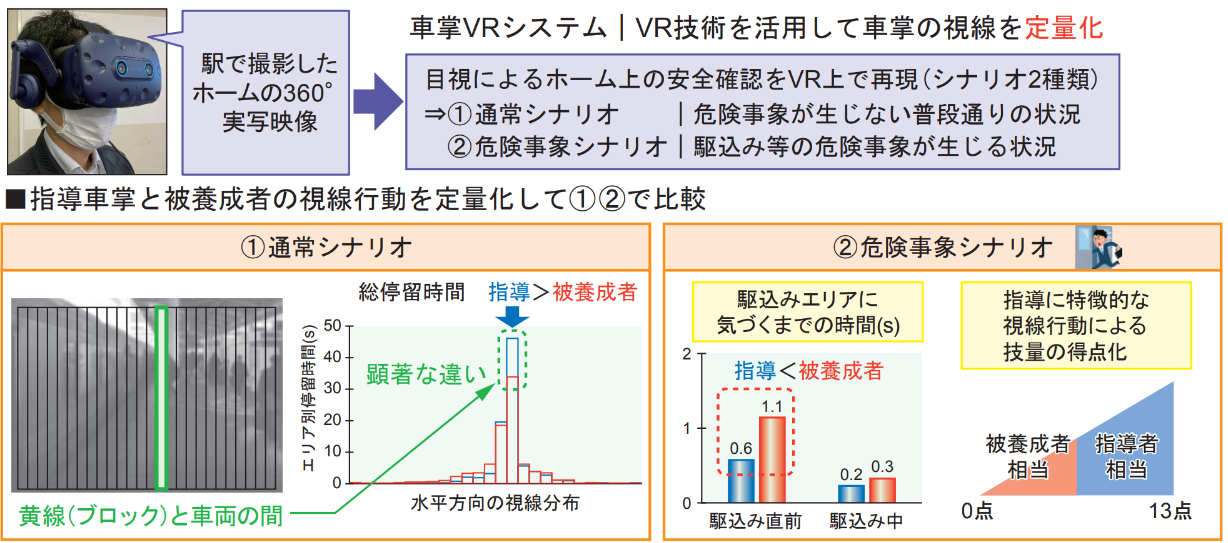
具体的には360°実写映像を用いてホームの安全確認を行う複数のシナリオ(危険事象のない通常シナリオ、駆込み乗車等が発生する危険事象シナリオ)を作成し、指導車掌66人と被養成者140人による体験結果から、差の現れる視線行動を統計的に明らかにしました。
例えば、通常シナリオでは、車掌位置から列車先頭方向を見た正面エリア(視覚障害者誘導用ブロックと車両の間付近)を見る時間に、両者で顕著な違いが見られました(図1①)。
危険事象シナリオでは、駆込み直前にお客さまが移動しているエリアに気づくまでの時間は、指導車掌の方が短いという結果が得られました(図1②左)。
さらに、このような指導車掌に特徴的な視線行動の技量を得点化し、視線行動が指導者に近いか被養成者に近いかを評価できるようにしました(図1②右)。
これらの視線行動の評価結果を、研修の指導者が事前に把握することで効率的な指導が可能となります。
また、定量化された視線行動を比較することで、さまざまな研修プログラムの効果の確認等に活用することもできます。
いずれのシナリオも約3分で実施可能であり、車掌の安全確認に関する実技講習プログラムの改善に資することが期待され、指導の効率化に寄与します。