15. 自律型列車運行制御システム
自動運転をさらに発展させた、運転、保守、運行管理を含む「列車運行全体の省力化 ・ 省人化」を目指した、自律型列車運行制御システムの研究開発に取り組んでいます。
このシステムは、線路内や沿線の支障物の有無、保守作業や災害による運転規制等の情報を列車に与え、これに基づいて各列車が自ら状況を判断することにより、安全かつ柔軟な運行の実現を目指すものです。
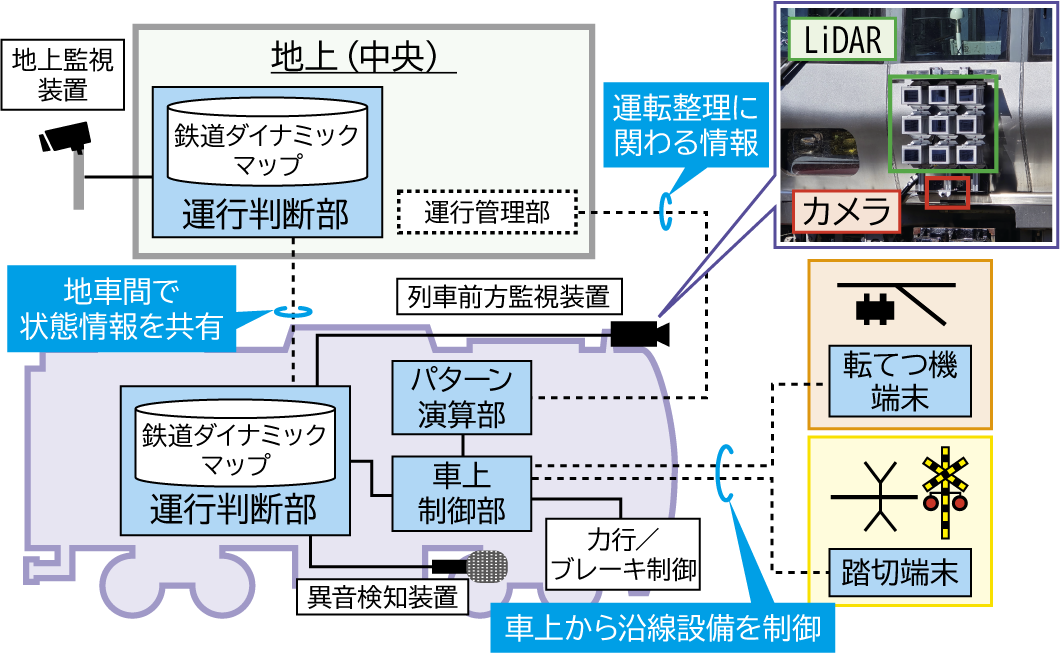
本システムは、車上制御部、運行判断部、パターン演算部、列車前方監視装置、異音検知装置、地上監視装置、運行管理部、転てつ機端末、踏切端末で構成されます(図1)。
これらの装置が連携し、監視装置が検知した情報を運行判断部の鉄道ダイナミックマップに反映して地上—車上間や各列車間で共有することで、個々の列車が自ら運行継続可否の判断、自動的な危険回避や運転再開を行います。
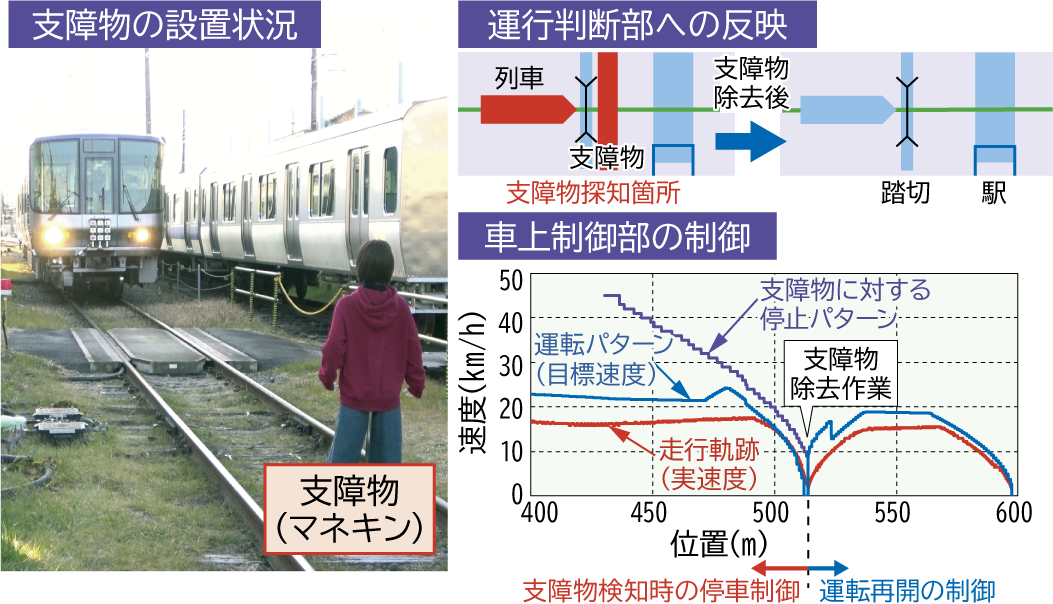
試作システムを用いて、鉄道総研内の試験線で実証試験を行い、設定した運転パターンに従って沿線設備を制御しながら自動運転すること、列車前方監視装置が検知した線路内支障物の情報をもとに運行判断部が列車の停止を判断して危険回避を行うこと、支障物の除去後には運行判断部が自動的に運転再開を判断して走行すること(図2)等の機能を確認しました。
本システムでは、車上から沿線設備を直接制御するため、地上の連動装置等を削減することができ、地上設備に関する施工・保守の省力化が可能です。
さらに、運転パターンの自動生成による運行管理の効率化も期待できます。
本システムは、将来の列車運行全体の省力化 ・ 省人化に関するコア技術であるとともに、支障物検知技術や鉄道ダイナミックマップを活用した情報共有と運行判断の技術は、踏切を有するような一般的な路線でのドライバレス運転の実現や、現行の運行業務の改善にも活用できます。